7. Robot Arm Control Course
This document will use the example of JetRover with Mecanum wheel chassis to explain the basic structure and motion control of this robotic arm. The control methods for robotic arms with different types of chassis within the same series are similar.
7.1 Basic Control
7.1.1 Get to Know Robotic Arm
JetRover is equipped with a 6DOF robotic arm, composed of intelligent bus servos and metal connection components, which can reach any position in feasible space. Six degrees of freedom consist of X-axis movement, Y-axis movement, Z-axis movement, X-axis rotation, Y-axis rotation, and Z-axis rotation, completing actions such as extension, rotation, and lifting. Additionally, it is equipped with a Dabai DCW depth camera, enabling different functions such as hand tracking, color recognition and sorting, color tracking, line following and obstacle avoidance, waste sorting, navigation and transportation.


The below table illustrates the relevant parameters of the robotic arm:
| Name | Instruction | Name | Instruction |
|---|---|---|---|
| Servo Composition | 35kg3 + 20kg2 + 12kg*1 high-voltage bus servo | Servo Accuracy | HTD-35H bus servos (3 units), HTS-20H bus servo, and HTS-21H bus servo have a precision of 0.2°; HX-12H bus servo has a precision of 0.3° |
| Material | Anodized aluminium alloy | Control Method | UART serial port command |
| Degree of Freedom | 6DOF + gripper | Communication Baud Rate | 115200 |
| Load | 500g (gripping and transporting weight) | Servo Memory | User settings Power-off protection |
| Wingspan | 410mm | Read-back Function | Support angle value read-back |
| Effective Gripping Range | Radius≤30cm | Servo Protection | Locked protection/ over-heat protection |
| Camera Name | Dabai DCW depth camera | Parameter feedback | Temperature, voltage, position |
| Pixel | 200W | System | Support windows, Linux and Openwrt |
| Resolution | 1920×1080 | Frame Rate | 60FPS |
| Connection | USB driver-free | Focusing Method | Auto-focusing |
Note
Prior to shipment, our company has completed the debugging of the robotic arm, eliminating the need for users to adjust.
This instruction facilitates users in restoring the robotic arm’s status after make modification.
The robotic arm is equipped with 6 joints, where the first joint controls the overall horizontal rotation of the robotic arm. During adjustment, it should be ensured that the robotic arm faces forward in relation to the vehicle, avoiding left or right deviation as much as possible.
Whether there is deviation in the robotic arm servo can be referenced from the side view and top view diagrams provided in this document.
After understanding the structure of the robotic arm, the following content pertains to the Dabai DCW depth camera.
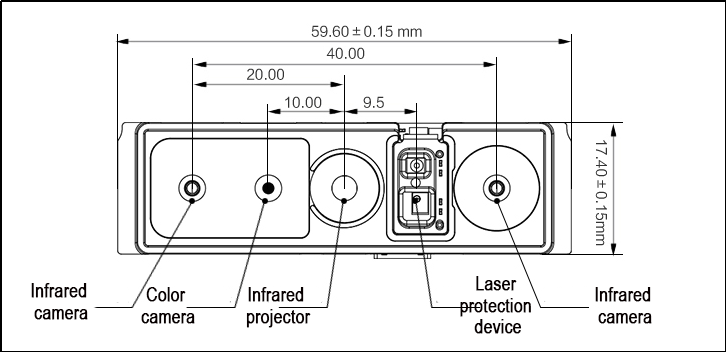
Dabai DCW depth camera is designed for service robot scenarios. Based on self-developed ASIC chips, Orbbec developed the Dabai DCW depth camera, a high-performance binocular structured light camera. The depth image resolution of up to 1920×1080@5/10fps, with an average power consumption of less than 1.2W. With just a USB 2.0 interface, the terminal can obtain high-precision 3D depth information for backend utilization, empowering robots to achieve functions such as perception, obstacle avoidance, and navigation.

Its specification parameters are illustrated below:
The specification of the depth camera:
| Parameter | Description |
|---|---|
| Dimension | 89.82 ×25.10 ×25.10 mm |
| Working range | 0.2m - 2.5m |
| Fan | Do not support |
| Baseline | 40mm |
| Power consumption | Average power consumption <2.3W; The maximum power is less than 5.0W (During operation, the duration should be equal to or less than 3ms every 33ms) |
| Depth FOV | When the camera D2C is not in use, it is H79° V62° D91°±3°. When the camera D2C is in use, it is H79° V55° D88.5°±3°. |
| Infrared FOV | H79° V62° D91°±3° |
| Color FOV | 16:9: H86° V55° D93.5°±3°; 4:3: H64° V55° |
| Relative accuracy | 1.0%(center 81% area) @1000mm; 1.1%(center 81% area) @2000mm |
| Depth resolution @ frame rate | 640400@5/10/15/30fps; 320200@5/10/15/30fps |
| Operating system | Support Android and Windows7/10 |
| Data transmission | USB2.0 Type-C |
| Power Port | Type-C |
| Application scenario | Indoor |
| Safety | Class1 laser |
| Operating temperature | 10℃ ~ 40℃ |
Note
There may be individual differences in 3D camera products. The product specifications provided are theoretical values and are for reference only. Please rely on actual performance for accuracy.
7.1.2 HTD-35H Serial Bus Servo Instructions
HTD-35H bus servo is controlled by serial port commands. The serial port baud rate is 115200. According to the provided communication protocol, user can send corresponding commands to servo to control servo rotation or read servo information. Servo parameters and ID are required to be set before controlling.
The interface of this servo is a half-duplex UART asynchronous serial interface so that the signal terminal can send and receive signals. When in use, we can send different commands to different ID through the serial port, which controls servo individually. It is widely applicable in different robotic arm joints.

Structure & Specification Parameters
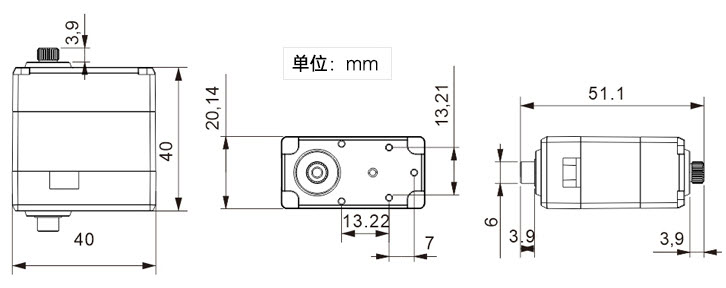
Servo Dimension Diagram:
| Specification | Details |
|---|---|
| Operating voltage | DC 9-12.6V |
| Rotation speed | 0.18sec/60° (DC 11.1V) |
| Rotation torque | 3.5kg.cm (DC 11.1V) |
| Static maximum torque | 3.5kg.cm (DC 11.1V) |
| Servo accuracy | 0.2° |
| Angle range | 0-1000 (0°~240°) |
| Control method | UART serial command |
| Communication band rate | 115200 |
| Memory | Servo settings are automatically saved when power off |
| Servo ID number | 0~255 for user setting, ID 1 is default |
| Read back Function | Support angle read back function |
| Protection | Avoid stalling and overheat |
| Parameter feedback | Temperature, voltage and position |
| Operating mode | Servo mode and deceleration motor mode |
| Gear type | Metal Gear |
| Servo Wire | 2Ocw, other line length can be selected |
| Plug-in model | PH2.0-3P |
| Weight | 64g |
| Size | S4.38mm*20.14mm*45.5mm |
| Application | All kinds of bionic robot joints |
Servo Feature
(1) High voltage servo, more power saving:
Compared with the traditional 7.4V servo, the 11.1V high-voltage servo can reduce the current by more than 60%, which greatly improves the battery life of the robot.
(2) Serial bus interface:
There is an I/O port on the controller board for connecting to the serial bus servo. The servos are connected through the three connectors, which makes the project have clean wiring and beautiful outlook.
(3) ID identification and Bus communication
Each servo can be set the ID number for the identification. The default ID number for each servo is 1 which is modifiable. The communication method of controller and servo is single-bus communication and its baud rate is 115200. User can set a corresponding ID number to each servo. The command from controller includes ID information so that only the servo matching the ID number can receive the corresponding command completely and then perform actions according to the commands.
(4) High-precision potentiometer:
The servo uses imported high-precision potentiometer as angle feedback. Excellent precision and linearity of the servo make robot run more table and greatly extend the service life of servo.
(5) Strong torque:
35KG strong torque builds up your robot.
(6) Position, temperature and voltage feedback:
With position, temperature and voltage feedback, you can get the internal data of the servo in real time to protect the servo.
(7) Two operation modes:
Support servo mode and geared motor mode.
Under servo mode, servo can rotate to the specific angle within 240 °.
Under geared motor mode, servo can rotate within 360° and the direction and speed of rotation can be controlled.
(8) Metal gear:
The high-precision inlay of the gears reduces the noise caused by the friction.
(9) Metal Shell:
Green oxidation metal shell improves heat dissipation ability.
Installation
Servo horn aims red “+” to install, please refer to the following picture.

The interface distribution and instruction refer to the below diagram and table:

| PIN | PIN Instruction |
|---|---|
| GND | GND |
| VIN | Power input |
| SIG | Signal terminal, half-duplex UART asynchronous serial interface |
7.1.3 PC Software Layout Instruction
PC Software Instruction
The PC computer corresponds to PLC computer, and is used to send instructions to PLC computer (robot) and receive feedback data from PLC computer. In general, we control PLC computer through running software on PC computer.
Only when PC software realizes serial port communication, it can send instructions to and receive feedback data from the robot. Serial port can be considered as USB interface. PC connects to robot through USB interface, and PC software communicate with robot also through USB interface.
The introduction to the PC software functions is given below.
Open PC Software
(1) Double-click  to open the ROS1 command-line terminal. Before adjusting the deviations and the robotic arm’s position, first disable the app’s auto-start service.
to open the ROS1 command-line terminal. Before adjusting the deviations and the robotic arm’s position, first disable the app’s auto-start service.
sudo systemctl stop start_app_node.service
(2) Click the Arm icon on the desktop to launch the control software.

Open through Command
(1) Double click to open the ROS1 command-line terminal. Before adjusting deviations and the robotic arm’s position, first turn off the app’s auto-start service.
sudo systemctl stop start_app_node.service
(2) Input the command and enter PC software directory.
cd software/arm_pc
(3) Input the command to open PC software.
python3 main.py
Note
Once the related servo nodes are activated (such as mapping and navigation), PC software or servo tool cannot be opened because the serial port is already occupied.
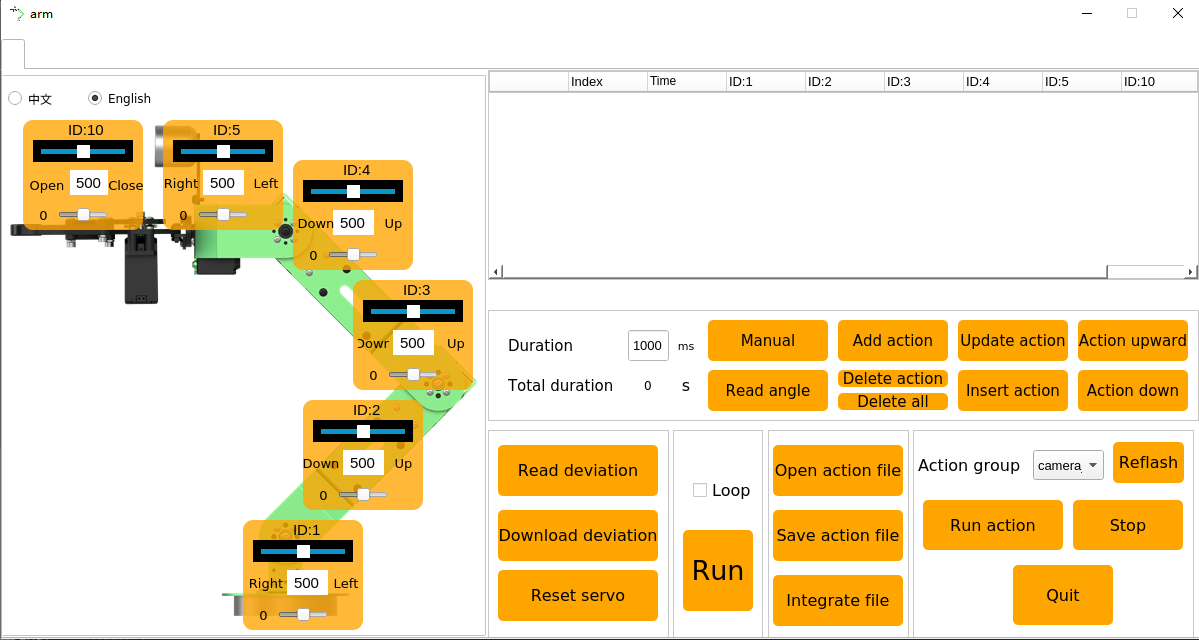
PC Software Interface Layout
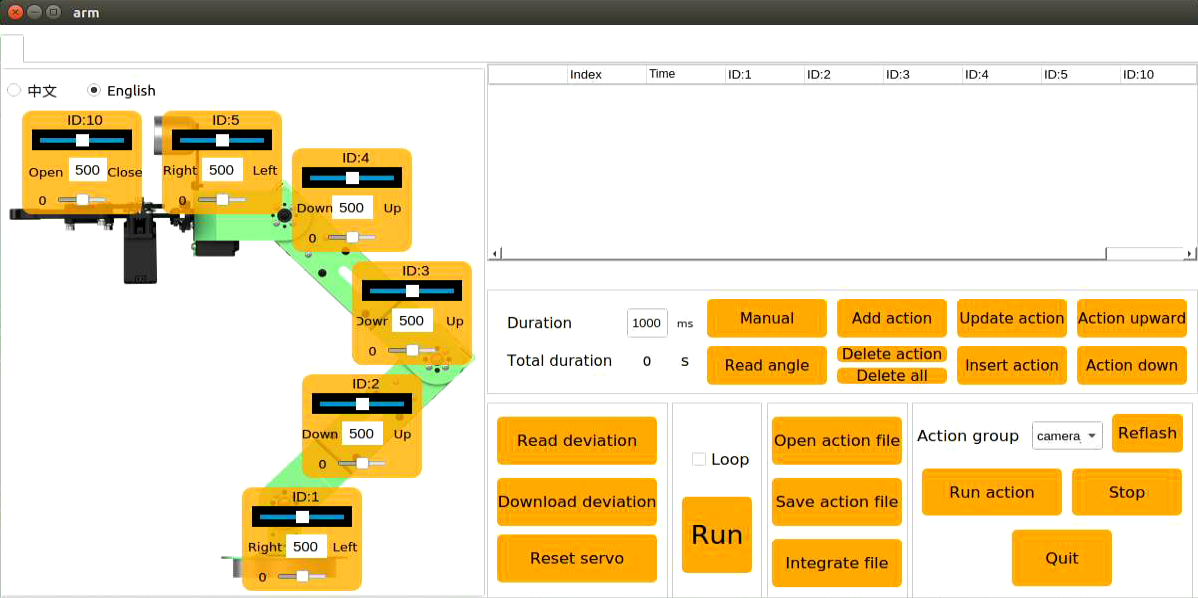
The interface under “normal mode” is as follow.
You can switch to “Servo Debug Tool” through the options on the upper left corner. Prior to the shipment, all the robots have been debugged, eliminating the need for the user to debug. If any issues require the use of this tool, it is mandatory to operate under the guidance of our support team, as improper use may result in robotic arm malfunctions.
The interface of the normal mode is divided into below areas:
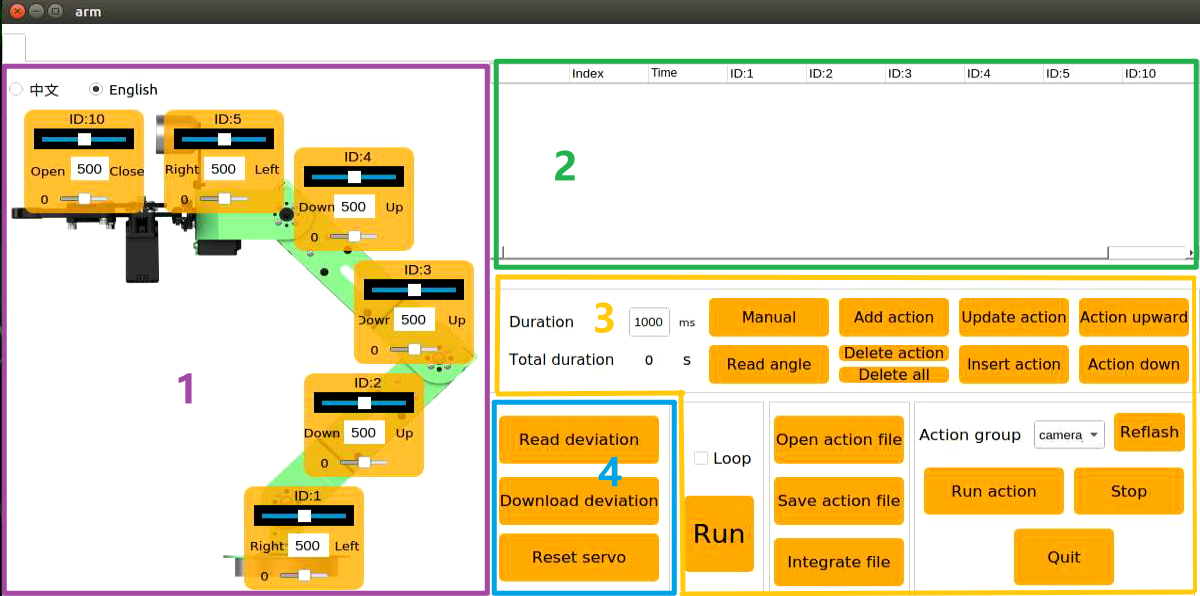
(1) Servo control area
Servo control area displays the icon of the selected servo. You can adjust the servo value by dragging the corresponding slider.
| Icon | Function |
|---|---|
 |
ID number of servo |
 |
Adjust servo position from 0 to 1000. |
 |
Adjust servo deviation from -125 to 125. |
(2) Action list
The running time and servo data of the current action are displayed on the action list.

| Icon | Function |
|---|---|
 |
Action group number |
 |
Running time of the action that is time taken to complete this action |
 |
Servo value. Double click the figure below  to revise. to revise. |
(3) Action group setting
| Icon | Function |
|---|---|
 |
Action running duration time. Directly click  to modify. to modify. |
 |
Total running time taking for all the actions in an action group |
 |
If you click this button, joints of robot become loose, and you can drag servos to design any posture |
 |
Read the servo angle you have designed before. This button should be used with |
 |
Add the servo value as a action to the last line of the action list |
 |
Delete action: delete the action selected in the action list; Delete all: delete all the action in action list |
 |
Replace the angle value of the action selected in the action list with the servo value in the servo control area. And update the running time as the time set in "Time" |
 |
Insert a new action above the selected action. The running time of this new action is the time set in "Time" and angle value is the current value in servo control area. |
 |
Move the selected action up one line |
 |
Move the selected action down one line |
 |
Click to run all the actions on the action list once (If "Loop" is ticked, JetAuto Pro will repeat the action.) |
 |
Load the data of the saved action group to the action list |
 |
Save the current actions in the action list into the designated path. |
 |
Firstly, open one action group, then click this button, and then open other action group. And these two action groups will be integrated into one. |
 |
Display the saved action groups. You can select the action to run. |
 |
Refresh action group drop-down menu. |
 |
Run the selected action group once. |
 |
Stop running the action group. |
 |
Exit PC software interface |
(4) Servo deviation setting area
| Icon | Function |
|---|---|
 |
Click to read the saved servo deviation. |
 |
Click to download the adjusted deviation to the robot. |
 |
Click to return all the servos to the mid point(500). |
7.1.4 Action Calling
What is Action Calling
Action calling is to directly call the edited action group via PC software to let robot perform this action.
JetRover has built-in action groups, and its action group files are stored in /ubuntu/software/arm_pc/ActionGroups. You can check and call built-in actions via PC software or command.
The specific operation steps are as follow:
Note
Only if action files are saved in /ubuntu/software/arm_pc/ActionGroups, can the files be called
Operation Steps
(1) Double click  to enter PC software interface.
to enter PC software interface.
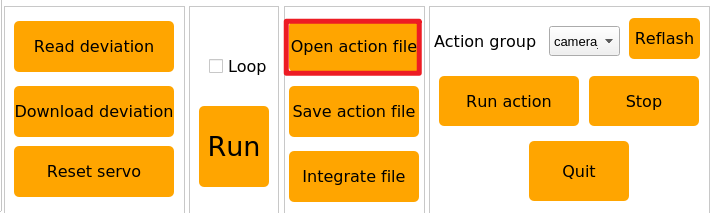
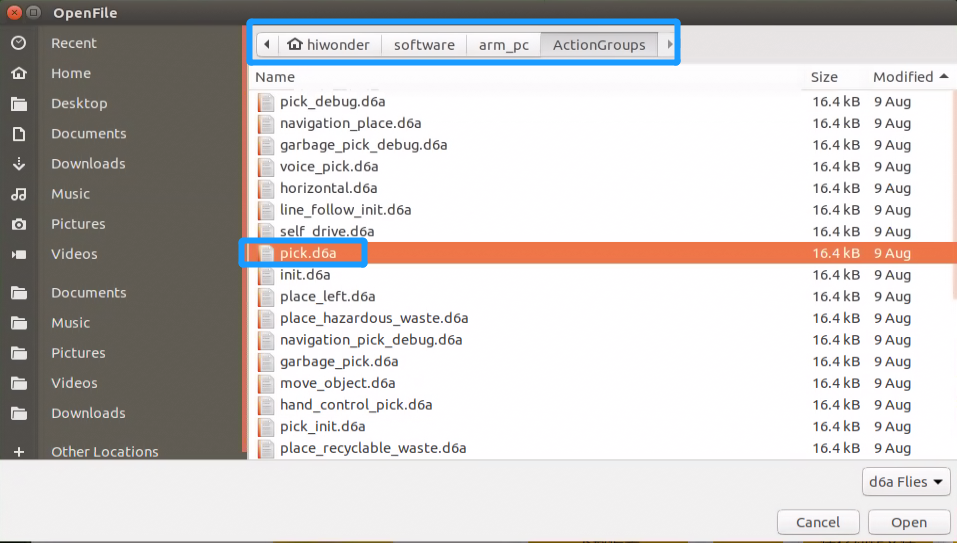
(2) Click “Open action file” button.
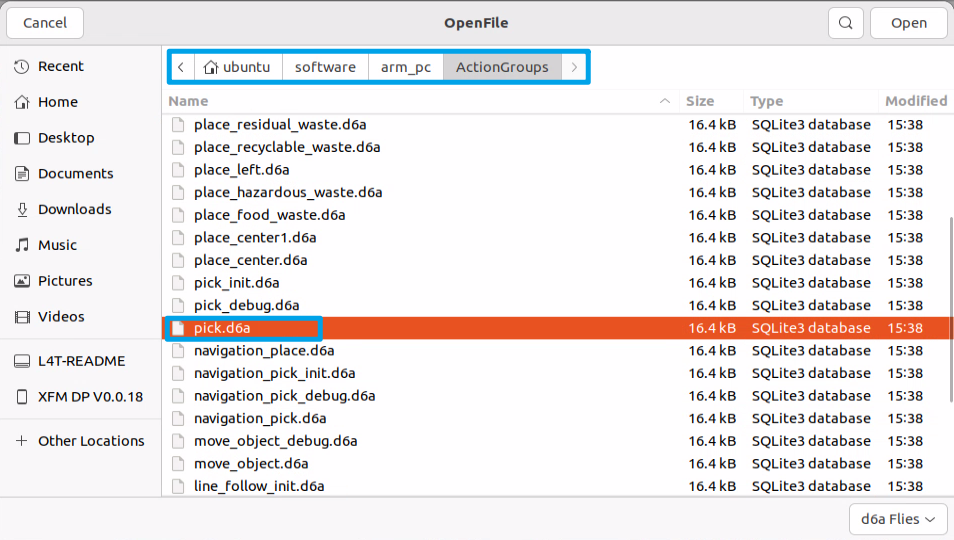
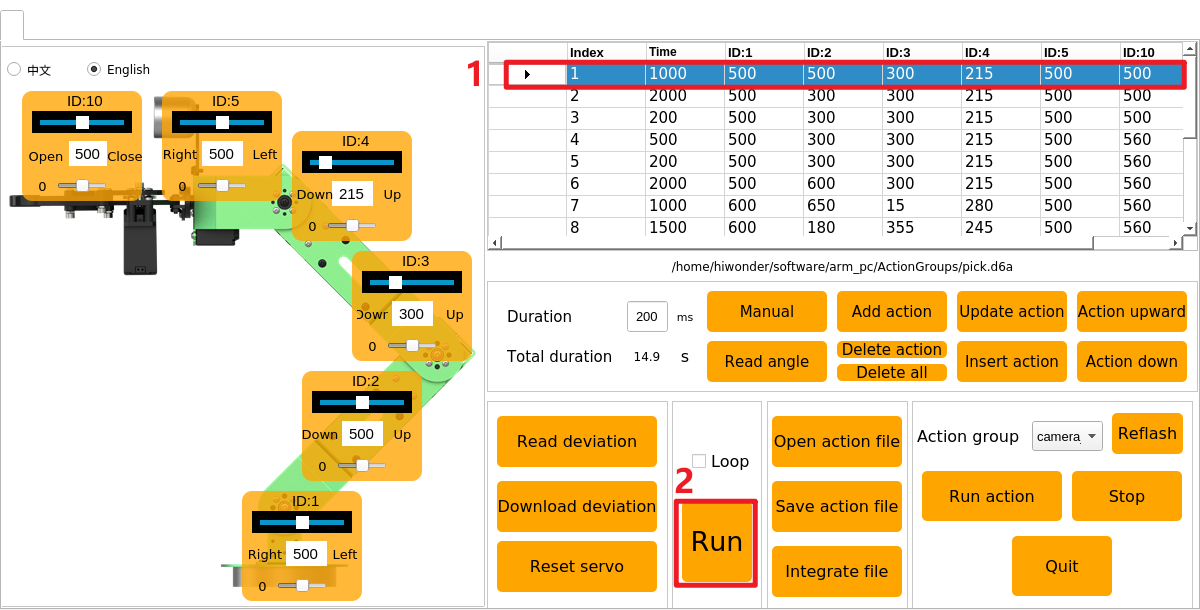
(3) Select action group you want, then click “Open”.
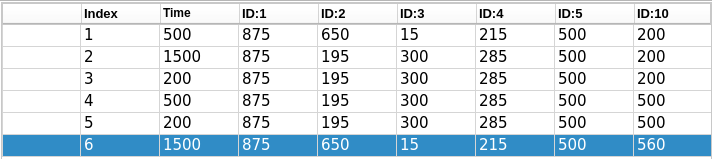
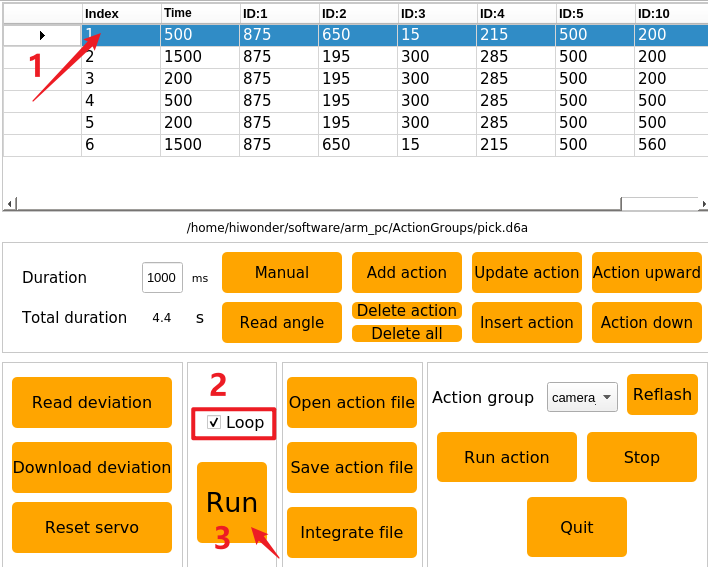
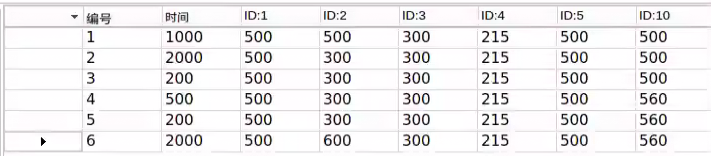
(4) Running time of each action and servo values are displayed on the action list
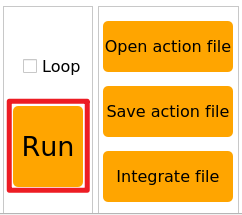
(5) You can first select number “1” and click “Run” button to run the selected action in action list. If you want to make robot repeat this action group, you can tick “Loop” and click “Run”.
7.1.5 Action Editing
Introduction
Adjust the angles of corresponding servos based on the target motion to achieve that motion. Multiple actions are combined into an action group.
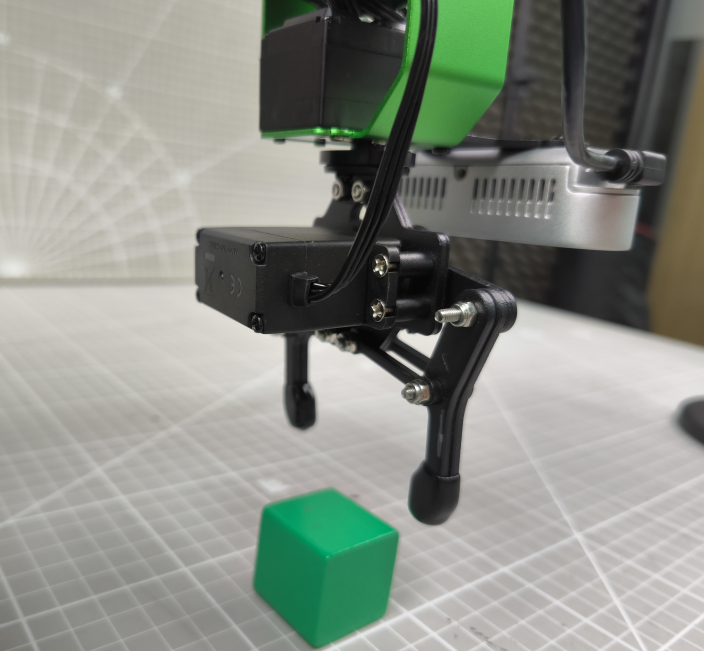
Edit several actions to form a action group so as to make robotic arm pick the block at left.
Design Action
(1) Put down antenna before operation to avoid robot arm of hitting antenna when it is moving.
(2) Double click to enter PC software interface.
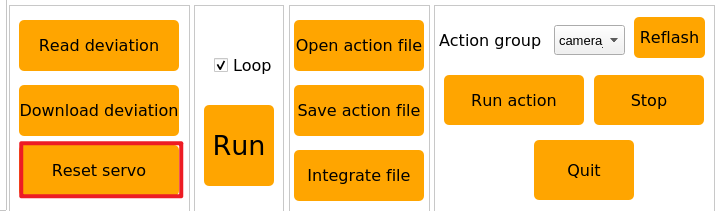
(3) Click “Reset servo” to make servo return back to mid-point.
(4) Drag the slider to set servo values as pictured to make robot arm bend to left.
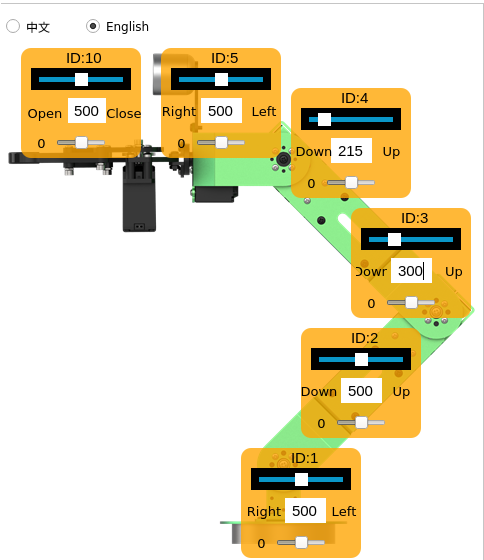
(5) Click “Add Action” to add current action to action list.

(6) Align robot arm with the block. Adjust value of corresponding servos as follow.
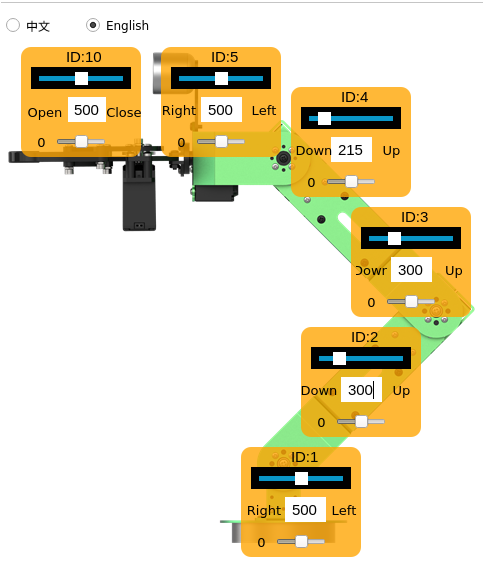
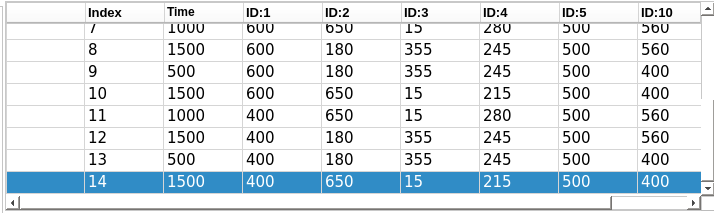
(7) Set the time as “2000ms”. Click “Add Action” to update NO.2 action.


(8) Add another transitional action. Set the time as 200ms and click “Add Action”.
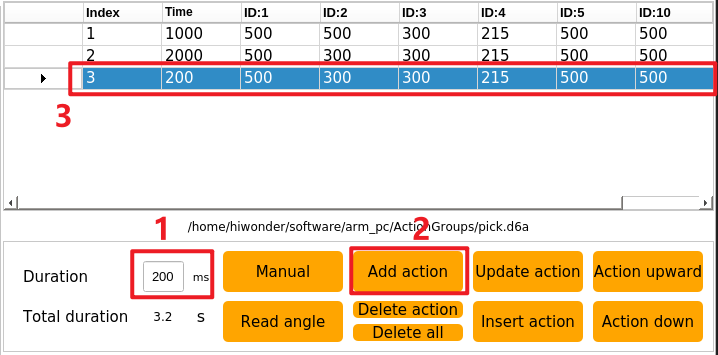
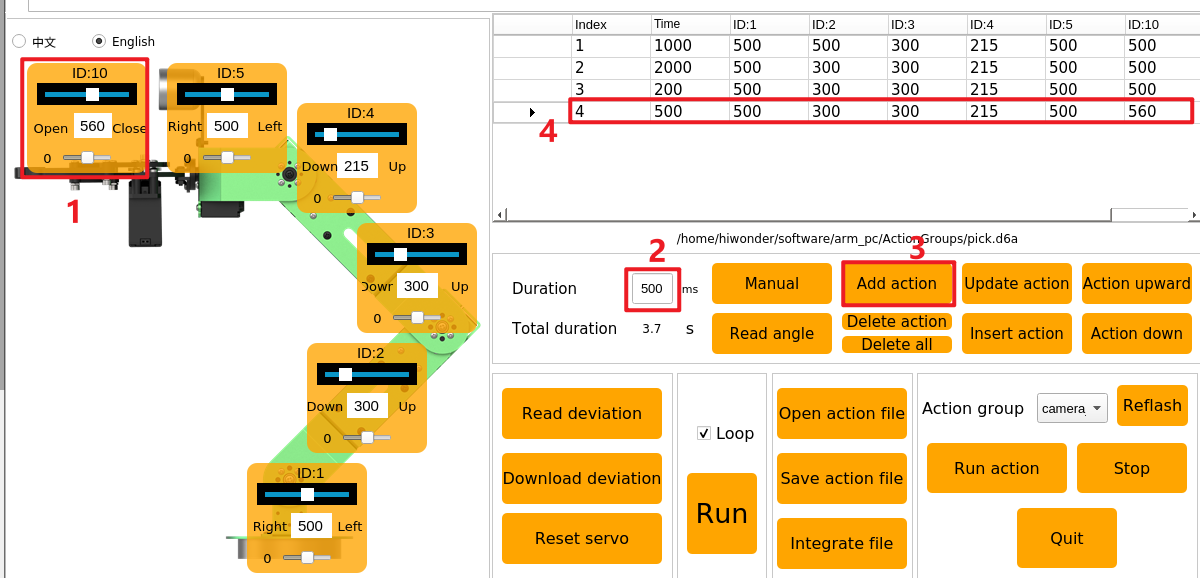
(9) Adjust NO.10 servo to let robot arm pick the block. Set times as 500ms, then click “Add Action”
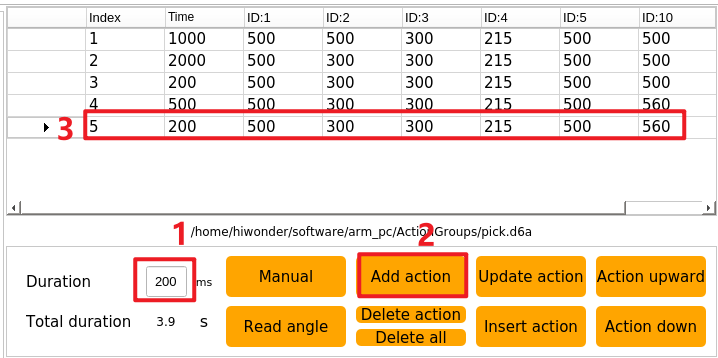
(10) Add a transitional action again. Set the time as “200ms”, and click “Add action” to form NO.5 action.
(11) Adjust servo value to make robot arm pick the block to specific height. Set the time as 2000 ms, and click “Add action”
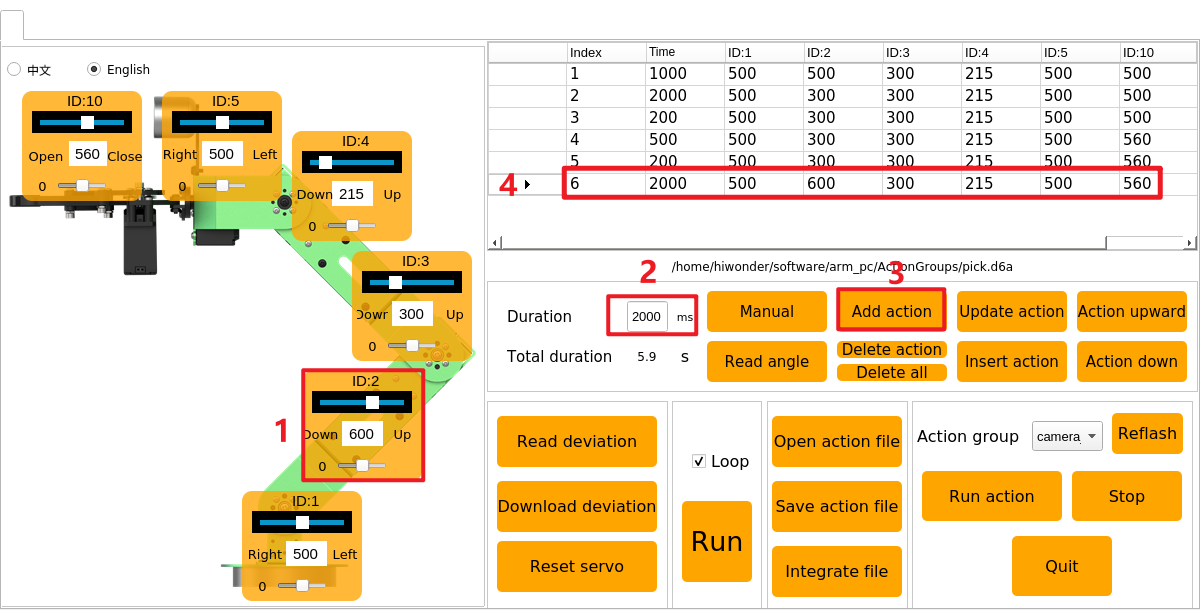
(12) After NO.6 action is edited, action group of “picking block at left” is complete.
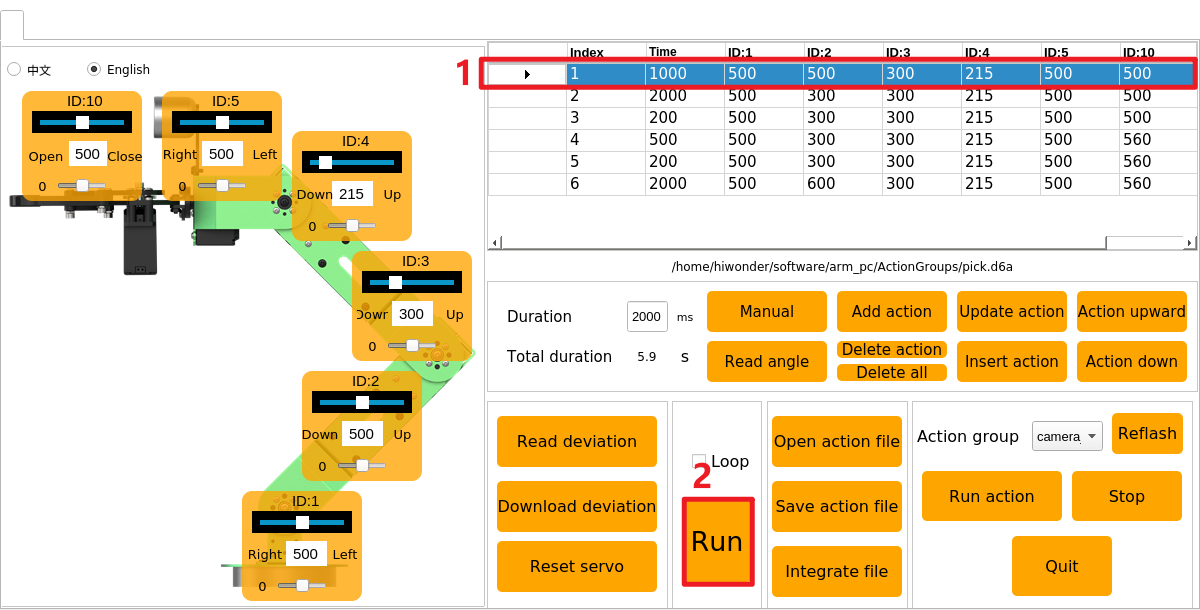
(13) Next, let robot arm run the whole action group. Select NO.1 action, then click “Run”. If you want to repeat this action, tick “Loop” box.
Save Action
Note
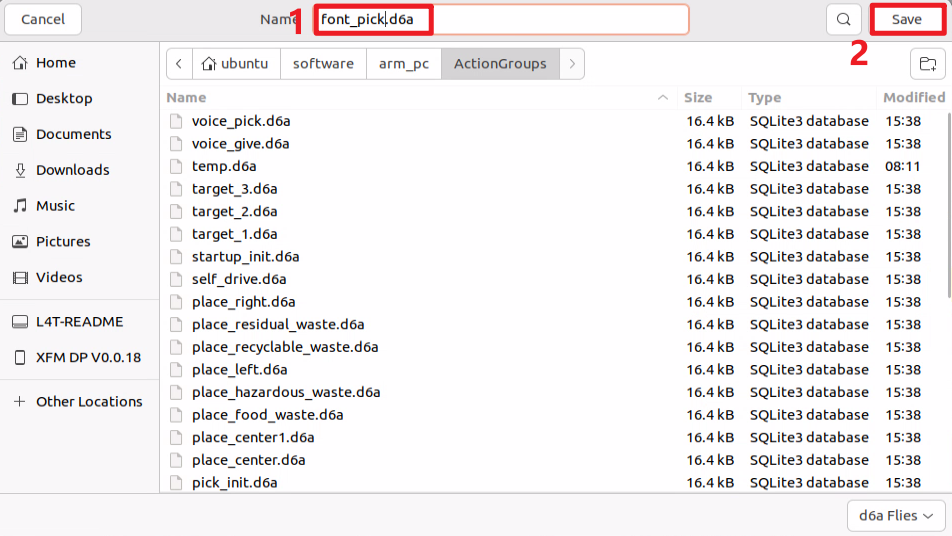
The name of action group cannot contain “Space”, otherwise the file cannot be saved in later debugging.
In case of future debugging and management, save the edited action group. Click “Save action file” and select this path, /ubuntu/software/arm_pc/ActionGroups.
Here takes the name of “font_pick” as example, and then click “Save” to save the action group.
7.1.6 Integrate Action Files
Introduction
Integrating action files is to integrate two action groups to form a new action group.
Operation Steps
(1) Put down antenna before operation to avoid robot arm of hitting antenna when it is moving.
(2) Double click to enter PC software interface.
(3) Click “Integrate files” button, and select the following path.
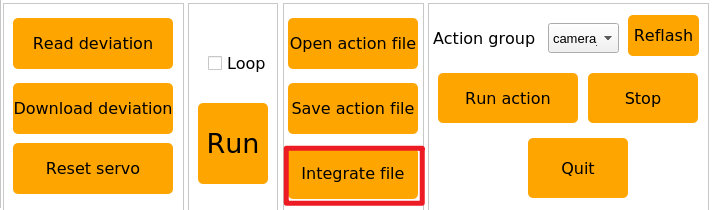
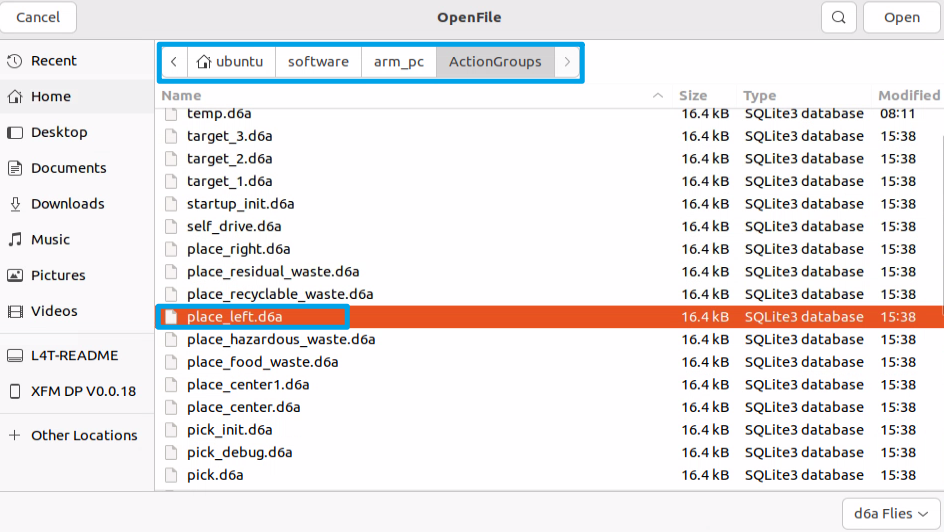
(4) Select and open “place_left.d6a” on the pop-up window.
(5) This action group is added to the action list.
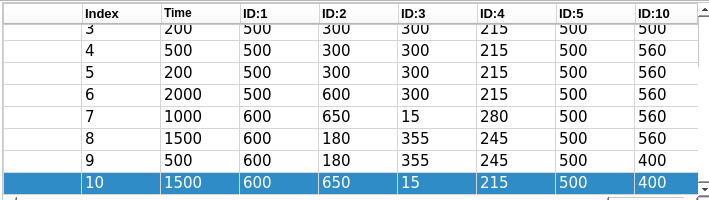
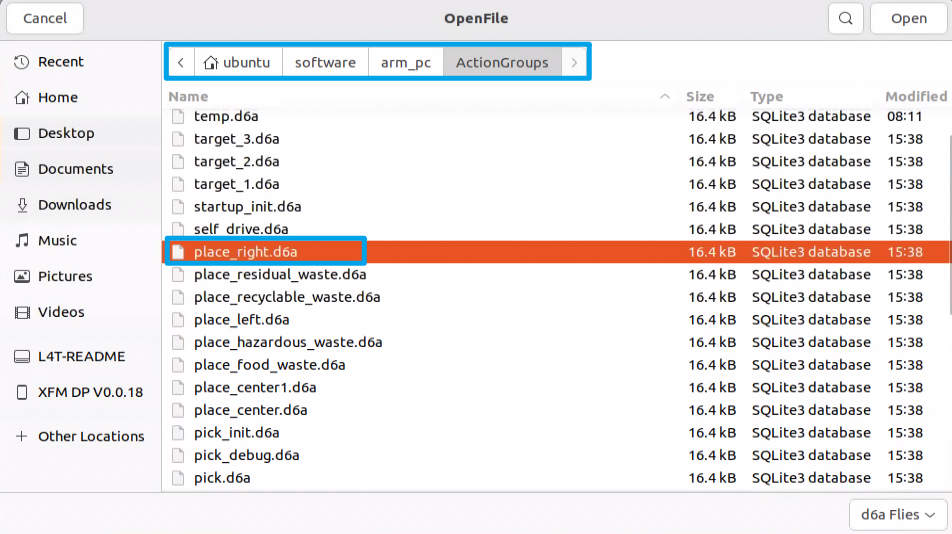
(6) Click “Integrate action files” button again. Select and open “place_right.d6a”. After that, this action group is added to the end of the first action group.
(7) Click NO.1 action, then click “Run” to let robot arm perform this integrated action.
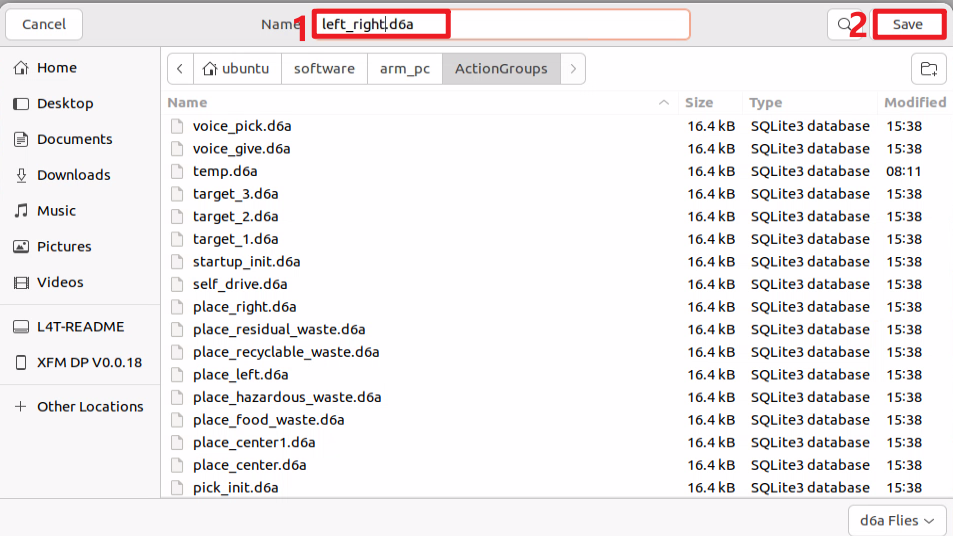
(8) Click “Save action files” button to save this new action group in case of future debugging.
(9) Name this new action group, for example “left_right”.
Note
Action group name cannot contain “Space”.
7.1.7 Export and Import Action Files
Introduction
Export the action group files edited on PC software, and import them to other devices of the same type.
Export Action
This section illustrates the export and import of the “pick.d6a” action group file as an example.
(1) Click 
(2) Find “pick.d6a” file.
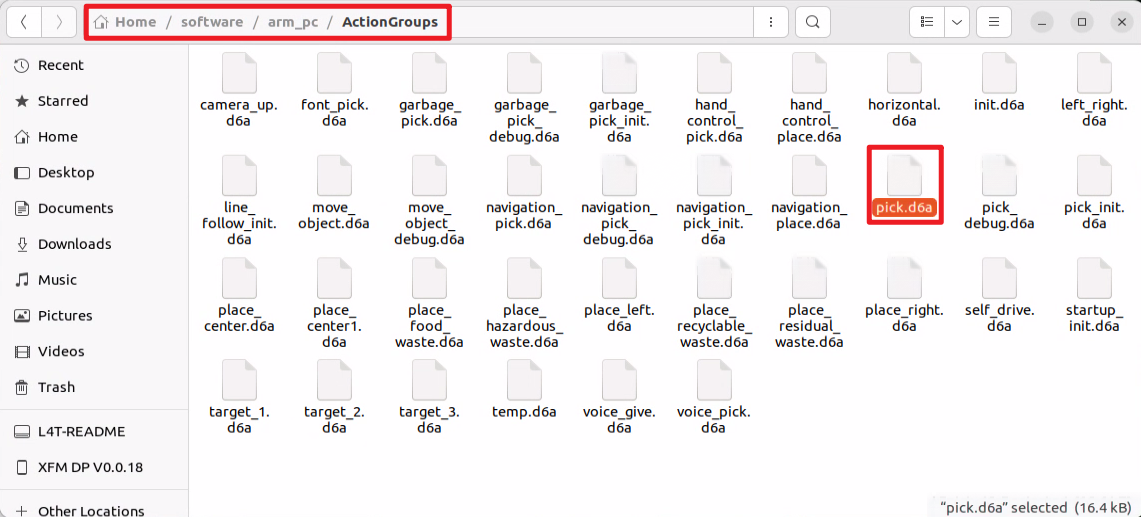
(3) Directly drag the action file to the computer desktop to export this file.
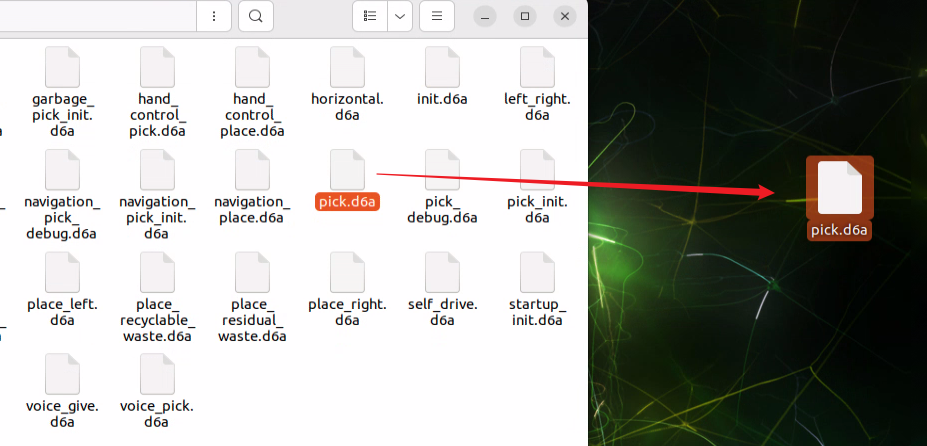
Import Action
(1) Put down antenna before operation to avoid robot arm of hitting antenna when it is moving.
(2) Directly drag “pick.d6a” action file to robot system desktop.
(3) Then directly drag or copy “pick.d6a” file to following path.
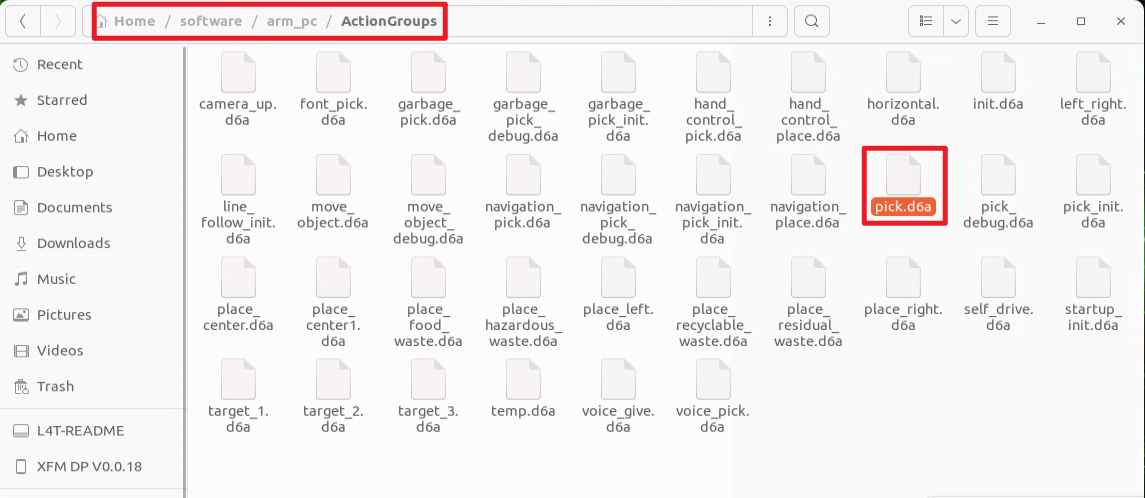
(4) Double click to enter PC software interface.
(5) Click “Open action files” button. Find the file you just import, and open it.
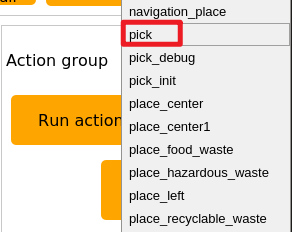
Or directly select the imported action group in this drop-down menu.
(6) Click “Run” button to let robot arm execute this action group.
7.1.8 Robot Arm Deviation Adjustment

As the robotic arm is used over time, the mechanical angle deviation of the servos on the arm will gradually increase. If the joints of the robotic arm cannot reach the specified target points during operation, you will need to manually adjust the servo deviations according to the instructions in this document.
Note
Before leaving the factory, the servo deviations of the robotic arm on the car have been fully adjusted. No servo deviation adjustment is required for the initial use or within a short period after receiving the product. Only if you notice significant deviations that affect normal functionality, should you refer to this document to adjust the servo deviations of the robotic arm.
Introduction to Robot Arm
This car features a 6-degree-of-freedom robotic arm, constructed with intelligent bus servos and metal sheet components, allowing it to move to any position within its operational space. It has six degrees of freedom: X movement, Y movement, Z movement, X rotation, Y rotation, and Z rotation, enabling it to perform actions such as extension, rotation, and lifting. Additionally, it is equipped with a depth camera (Dabai DCW) that can be used in conjunction with the robotic arm for various functions, including hand-following color block recognition and sorting, color block tracking, line-following obstacle clearance, waste sorting, and fixed-point navigation and transport.

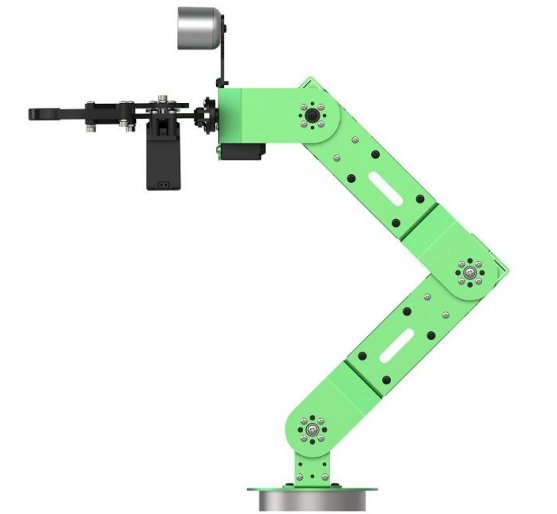
JetRover is a 6-degree-of-freedom robotic arm, composed of intelligent bus servos and metal sheet components.




The JetRover’s 6-degree-of-freedom robotic arm consists of six intelligent bus servos: HTD-35H3 (body), HTS-20H1 (pan-tilt), HTS-21H*1 (claw), and HTD-35H bus servo (wrist).
The bus servos use serial communication to connect multiple servos through a single bus control system. This allows multiple servos to be connected through a single I/O port, providing higher precision compared to digital servos, albeit at a slightly higher cost.
The interface distribution and description are exemplified by one of the HTD-35H servos, as shown below:

| PIN | Description |
|---|---|
| GND | Power Ground |
| VIN | Power Input |
| SIG | Signal End (Half-Duplex UART Asynchronous Serial Interface) |
Adjustment Steps
Before adjusting the servo deviations, it is essential to identify and understand the corresponding ID numbers for each servo on the robotic arm. These IDs will be used during the adjustment process.
The IDs are as follows:
ID 1: Pan-tilt Servo
IDs 2, 3, 4: Robotic Arm Joint Servos
ID 5: Wrist Servo
ID 10: Claw Servo

In total, six servos are controlled on the robotic arm. These servos may develop deviations over time, requiring adjustment to the mid-position standard of the robotic arm.
When adjusting servo deviations, refer to the standard servo deviation adjustment diagram. The robotic arm can be considered deviation-free only if it meets both of the following standards:

Standard 1: The servos with IDs 1, 2, 3, 4, and 5 must be horizontally and vertically aligned with the base of the car in the mid-position state. As shown in the diagram, the central screws on the servo discs should form a line that vertically passes through these servos.

Standard 2: The claw on the robotic arm must maintain an opening distance of 2-3 cm (this represents the mid-position standard for the claw servo). This can be measured using two fingers (index and middle), which should fit snugly within the gap.
Instructions
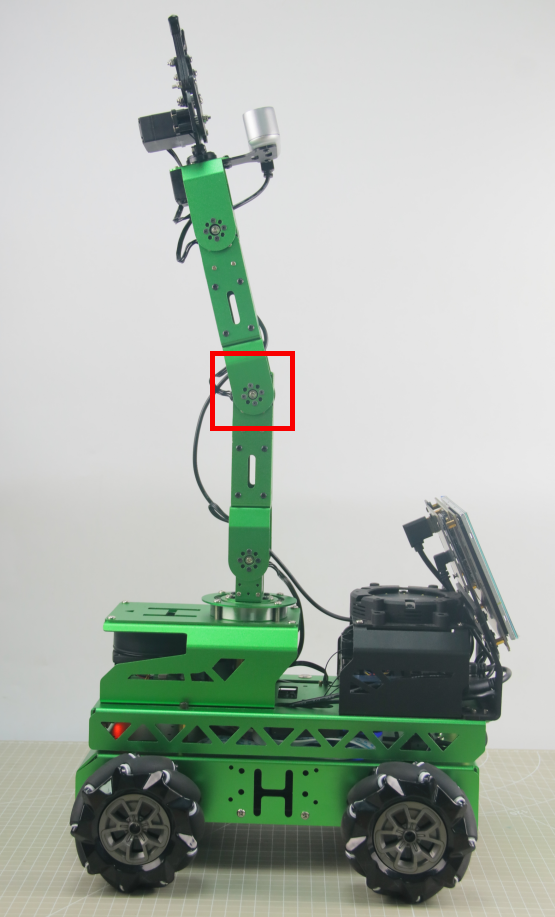
After understanding the adjustment standards, you can now adjust the deviation of the robotic arm according to these standards. Taking the deviation adjustment of Servo 3 of the JetRover robot’s arm as an example, as shown in the diagram below, Servo 3 has a deviation, causing misalignment in the positions of Servos 4, 5, and 10. Therefore, adjustment needs to be made using the robot’s upper computer software at this time.
The detailed instructions are as below:
(1) Access the robot system using NoMachine. Then click-on  to open the ROS1 terminal.
to open the ROS1 terminal.
(2) Execute the following command to disable the auto-start service.
sudo systemctl stop start_app_node.service
(3) Double-click the “arm” icon on the desktop to enter the interface of the robotic arm’s PC software, as shown in the following image:

For details about the interface and related content of the “arm” software, please refer to the Basic Control document. This document focuses specifically on adjusting servo deviations.
(4) Clicking the “Reset Servo” button, it was found that Servo 3 of the robotic arm has a deviation.
(5) Click the “Read Deviation” button to obtain the current deviation values for the servos installed on the robotic arm.
(6) After the “Read Deviation Successful” popup appears, click the “OK” button.

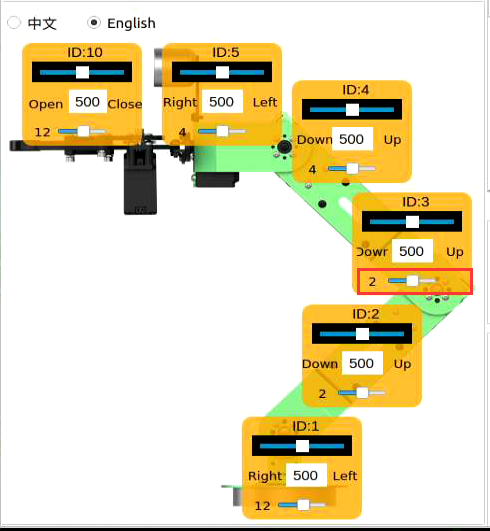
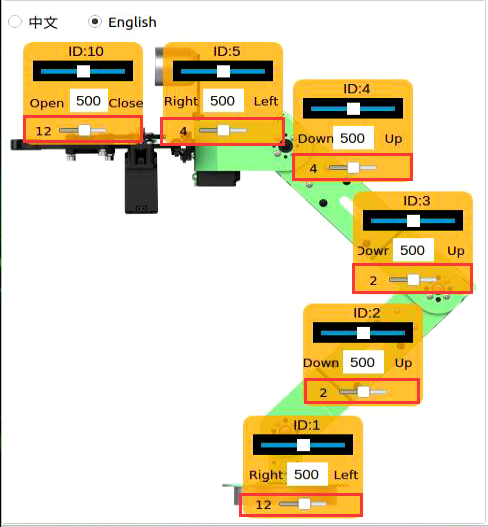
(7) Check the deviation value for Servo ID: 3, as shown in the diagram below. In this diagram, each servo is identified by its respective ID number. The slider above indicates the current position, the middle number displays its position value, and the bottom slider represents the set deviation value for the servo.
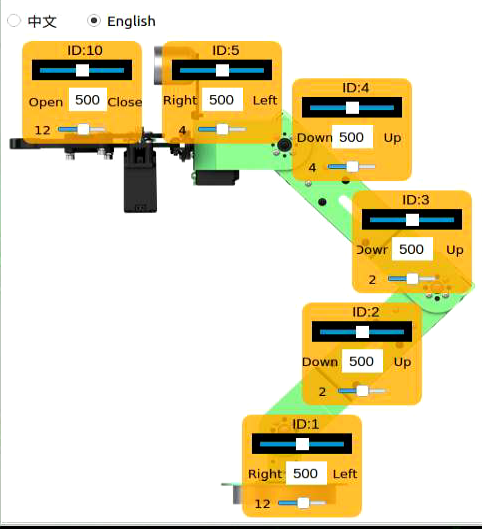
(8) You can see that the deviation value for Servo ID: 3 is -18. When Servo 3 has such a deviation, adjustment should be made in the opposite direction until it reaches the “Standard (1)” state specified in the “Adjustment Standard”.
Now you can see that the deviation value for Servo ID: 3 has been adjusted to “2”, bringing the robotic arm’s status to the “Standard (1)” state as specified in the “Adjustment Standard”. This completes the setting for adjusting the deviation of Servo 3. Next, you need to save the current value to the local computer of the robot. After the robot is restarted, it will use these saved values for servo control. The procedure for reading other servo IDs is the same.
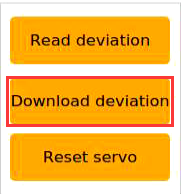
(9) Click-on ‘Download Deviation’ button.
(10) Wait for the prompt “Download Deviation Successful” to appear, then click “OK” to exit the window.
This completes the adjustment of Servo 3’s deviation.
(11) When we need the robotic arm to return to its initial state, we can select “camera” within the action group range.
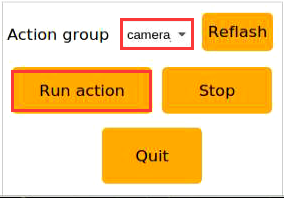
(12) Choose ‘init’.
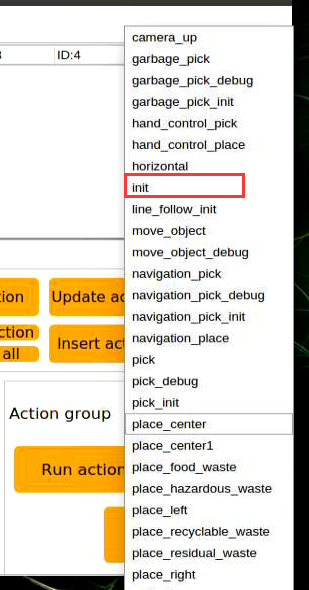
(13) Click “Execute Action” to have the robotic arm perform the “init” action group.
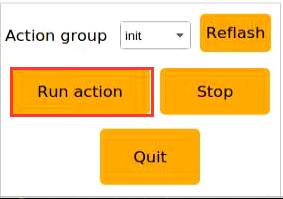
After clicking, the robot’s status is as shown in the following image:

After completing the above steps, Servo 3 of the robot’s arm has been adjusted. If other bus servos on the robot show deviations that do not meet the judgment criteria, you will need to repeat the adjustment steps to adjust the corresponding servo deviations. It is important to note that during adjustment, you should adjust the lower slider and then download the deviation for it to take effect. The specific position is indicated by the green box in the following image:
FAQ
(1) When adjusting the position of the gripper, I found that no matter how much I adjusted it beyond a certain point, the gripper on the robotic arm did not respond?
Our company has implemented mechanical limits on the gripper of the robotic arm, specifically Servo 10 corresponding to the mechanical gripper. When the position set through the PC software exceeds 700, it reaches the mechanical limit of the gripper, preventing it from further tightening. Exceeding this limit may risk damaging the servo. In such cases, simply adjust in the opposite direction.
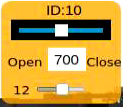
It is recommended to adjust Servo 10 within the range of [200, 700] during this adjustment.
(2) After clicking “Read Deviation”, the software interface freezes
Because the bus servos communicate via serial communication, if the auto-start service is not disabled after the robot starts, it can block message transmission, causing the software interface to freeze. The solution is to disable the auto-start service by following the steps outlined in the adjustment procedure.
7.2 2D Vision(Vision Application)
The robotic arm is a mechanical device that is able to simulate the human arms and is widely used in various fields such as industrial, medical and military. Here are several application scenarios of robotic arms:
Industrial automation: The application of robotic arms in industrial production is particularly widespread, they can be used for tasks such as handling, assembly, welding, painting, etc., greatly improving production efficiency and quality.
Medical Assistance Therapy: Robotic arms can be used in operating room to provide doctors with higher precision in surgical procedure, reducing surgical errors and other adverse outcomes.
Electronic Equipment Maintenance: Robotic arms can be used for electronic equipment maintenance, especially in compact spaces or high-risk environments, where they can prevent personnel from being injured.
Space Exploration: The application of robotic arms in space exploration missions, such as probing planetary surfaces, collecting samples, and other tasks, is an extremely important technological means.
In conclusion, the application scenarios of robotic arms are extremely diverse. With the continuous advancement of technology, the use of robotic arms in various fields will become increasingly widespread. Therefore, this document will introduce the relevant applications of the robotic arm on JetRover, allowing users to experience the different functional effects of visual robotic arms.
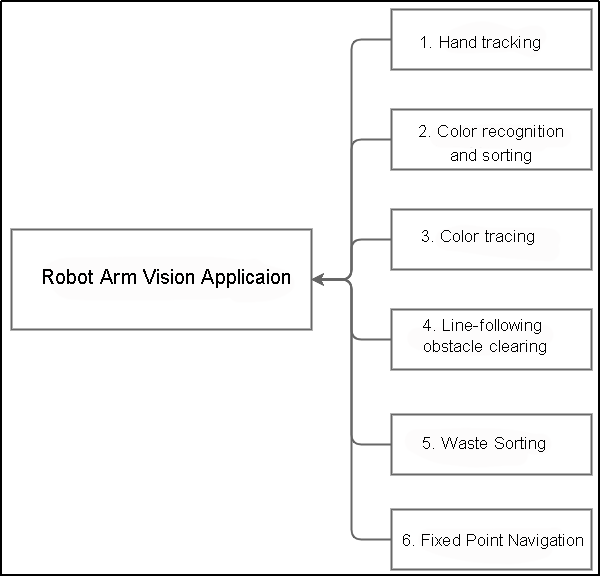
The diagram above illustrates the structure of “Robotic Arm Visual Applications” functionality, including hand tracking, color recognition and sorting, color tracking, line-following clearance, waste sorting, navigation and transportation. The following content will be written based on this diagram.
7.2.1 Hand Tracking
Program Logic
What is the application scenario of the hand tracking?
(1) Virtual realization hand tracking technology can be used in virtual realization games, enabling players to control game characters’ movements, attacks, and other actions through gestures.
(2) Medical hand tracking technology can be used in rehabilitation training to help patients regain hand functionality.
(3) Educational hand tracking technology can be used in the field of education, allowing students to engage in interactive learning through gestures.
(4) Smart home hand tracking technology can be used in smart homes, allowing users to control home devices’ switches, adjustments, and other operations through gestures.
(5) Industrial production hand tracking technology can be used in industrial production, allowing workers to control robots’ operations through gestures, thus improving production efficiency.
The hand features detection in JetRover utilizes MediaPipe, an open-source multimedia machine learning model application framework. It can run cross-platform on mobile devices, workstations, and servers, and supports mobile GPU acceleration. It also supports the inference engines of TensorFlow and TF Lite, allowing any TensorFlow and TF Lite models to be used with MediaPipe. Additionally, on mobile and embedded platforms, MediaPipe also supports device-native GPU acceleration.
Firstly, it is necessary to build a hand recognition model and subscribe to the topic messages published by the camera node to obtain images. Then, process the images, such as flipping, and detect hand information within the images. Next, based on the lines connecting the keypoints of the hand, obtain the position of the center point of the hand. Finally, control the robotic arm to follow the up-and-down movement of the hand’s center point.
The source code of the program is located in: /home/ubuntu/ros2_ws/src/example/example/hand_track/hand_track_node.py
Operation Steps
Note
The entered command should be case sensitive and “Tab” key can be used to complement the key words.
(1) Start JetRover and connect it to NoMachine.
(2) Double click on  to start the command line terminal.
to start the command line terminal.
(3) Input the command and press Enter to disable the app service.
sudo systemctl stop start_app_node.service
(4) Input the command to start the game program.
ros2 launch example hand_track_node.launch.py
(5) To exit this mode, press ‘Ctrl+C’ on the terminal interface. If this fails, you can open a new command line terminal and input the command to close all current ROS functions.
~/.stop_ros.sh
Outcome
After the game starts, the robotic arm will restore its initial posture. Place your hand in front of the camera of the robotic arm. When you move your hand up and down, robotic arm will move with your hand.
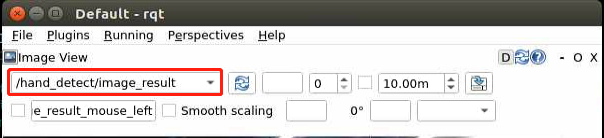
Note
This mode may cause the program to freeze when displaying the feedback screen, so the feedback screen will not be shown during execution. If you need to view the feedback screen, you can open a new command line terminal, enter the command rqt, and select /hand_detect/image_result.
Program Analysis
(1) Launch Analysis
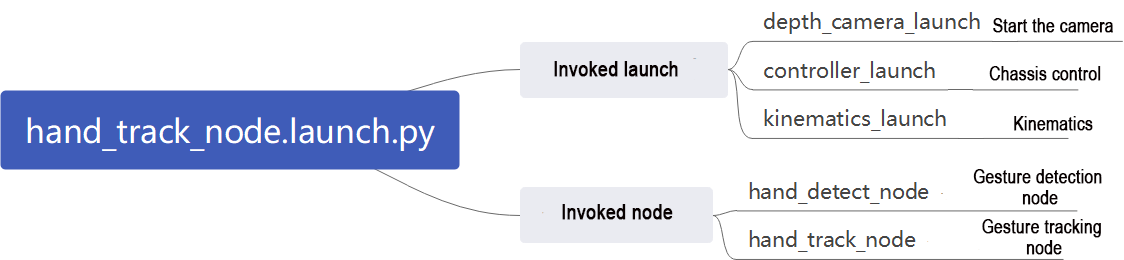
The program is saved in: ros2_ws/src/example/example/hand_track/hand_track_node.launch.py
① Read the package path
Read the paths of the peripherals, controller, and kinematics packages.
14 15 16 17 18 19 20 21 | if compiled == 'True': peripherals_package_path = get_package_share_directory('peripherals') controller_package_path = get_package_share_directory('controller') kinematics_package_path = get_package_share_directory('kinematics') else: peripherals_package_path = '/home/ubuntu/ros2_ws/src/peripherals' controller_package_path = '/home/ubuntu/ros2_ws/src/driver/controller' kinematics_package_path = '/home/ubuntu/ros2_ws/src/driver/kinematics' |
② Initiate other Launch files
depth_camera_launch: Used to initiate the depth camera
controller_launch: Used to initiate base control, servo control, etc.
kinematics_launch: Used to initiate kinematic algorithms
23 24 25 26 27 28 29 30 31 32 33 34 35 | depth_camera_launch = IncludeLaunchDescription( PythonLaunchDescriptionSource( os.path.join(peripherals_package_path, 'launch/depth_camera.launch.py')), ) controller_launch = IncludeLaunchDescription( PythonLaunchDescriptionSource( os.path.join(controller_package_path, 'launch/controller.launch.py')), ) kinematics_launch = IncludeLaunchDescription( PythonLaunchDescriptionSource( os.path.join(kinematics_package_path, 'launch/kinematics_node.launch.py')), ) |
③ Initiate Node
hand_detect_node: Used to launch hand detection
hand_track_node: Used to launch hand tracking
37 38 39 40 41 42 43 44 45 46 47 48 | hand_detect_node = Node( package='example', executable='hand_detect', output='screen', parameters=[{'enable_display': enable_display}] ) hand_track_node = Node( package='example', executable='hand_track', output='screen', ) |
(2) Source Code Analysis
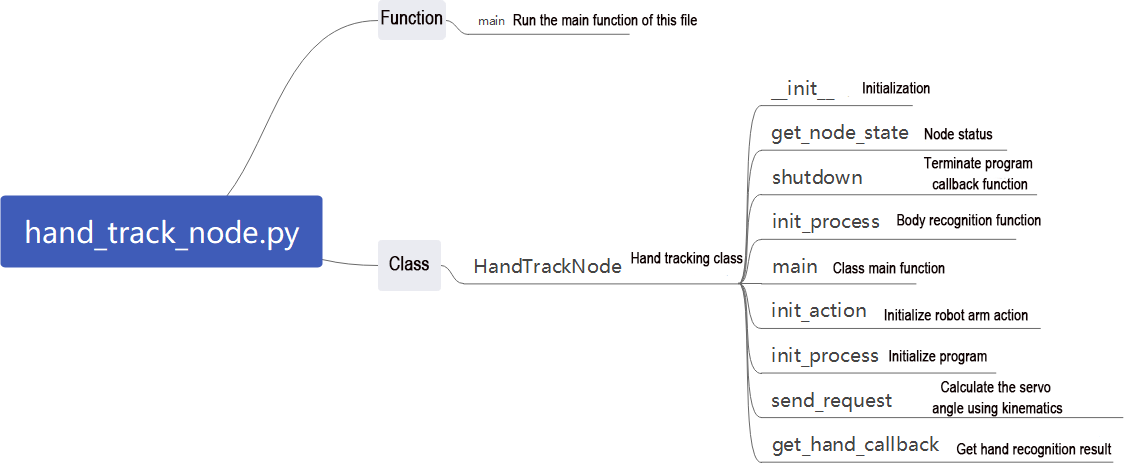
The program is saved in: ros2_ws/src/example/example/hand_track/hand_track_node.py
① Main Function
126 127 128 129 130 131 | def main(): node = HandTrackNode('hand_track') executor = MultiThreadedExecutor() executor.add_node(node) executor.spin() node.destroy_node() |
The main function is used to invoke the hand recognition class startup node.
② HandTrackNode Class
init_process:
51 52 53 54 55 56 57 58 | def init_process(self): self.timer.cancel() self.init_action() threading.Thread(target=self.main, daemon=True).start() self.create_service(Trigger, '~/init_finish', self.get_node_state) self.get_logger().info('\033[1;32m%s\033[0m' % 'start') |
Initialize the action and start the main function main to publish the initialization status of the current node.
send_request:
76 77 78 79 80 | def send_request(self, client, msg): future = client.call_async(msg) while rclpy.ok(): if future.done() and future.result(): return future.result() |
Used to publish the recognized hand position to the kinematic node and obtain the servo angle of the kinematic feedback.
get_hand_callback:
82 83 84 85 86 | def get_hand_callback(self, msg): if msg.width != 0: self.center = msg else: self.center = None |
Utilized to get the current hand recognition result.
main:
88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 | def main(self): while self.running: if self.center is not None: t1 = time.time() self.pid_y.SetPoint = self.center.width / 2 self.pid_y.update(self.center.width - self.center.x) self.y_dis += self.pid_y.output if self.y_dis < 200: self.y_dis = 200 if self.y_dis > 800: self.y_dis = 800 self.pid_z.SetPoint = self.center.height / 2 self.pid_z.update(self.center.y) self.z_dis += self.pid_z.output if self.z_dis > 0.46: self.z_dis = 0.46 if self.z_dis < 0.36: self.z_dis = 0.36 msg = set_pose_target([self.x_init, 0.0, self.z_dis], 0.0, [-180.0, 180.0], 1.0) res = self.send_request(self.kinematics_client, msg) t2 = time.time() t = t2 - t1 if t < 0.02: time.sleep(0.02 - t) if res.pulse: servo_data = res.pulse set_servo_position(self.joints_pub, 0.02, ((10, 500), (5, 500), (4, servo_data[3]), (3, servo_data[2]), (2, servo_data[1]), (1, int(self.y_dis)))) else: set_servo_position(self.joints_pub, 0.02, ((1, int(self.y_dis)), )) else: time.sleep(0.01) self.init_action() rclpy.shutdown() |
Based on the results of hand recognition, control the pan-tilt servo using PID; employ PID to control the required height of the current robotic arm, and derive servo angles through kinematics; finally, publish the current servo parameters to complete the tracking process.
7.2.2 Color Recognition and Sorting
Program Logic
With the further development of automation technology, production line in manufacturing enterprises are increasingly moving towards automation and intelligence. As a result, a large number of automated devices are gradually being introduced into the production lines. Among them, in the process if martial color recognition, positioning, and sorting, visual systems are required for tasks such as image acquisition and data analysis to effectively identify and locate the color of the samples. Motion control technology provides effective solutions for visual color recognition, positioning, and sorting to improve the production capacity of enterprises.
The vision detection method using motion control technology features fast detection speed, good reliability, and high efficiency. It can achieve non-contact and non-destructive testing. Machine vision color recognition, positioning, and sorting have good applicability in various industries and have widespread market applications.
First, subscribe to the topic messages published by the color recognition node to obtain recognition color information and images.
Next, invoke the initialization action group file to prepare the robotic arm for the desired posture.
Finally, based on the required color information, match the corresponding sorting actions and then execute the sorting actions to sort the color blocks into the respective areas.
The robot performs sorting tasks after recognizing the colored blocks from its own perspective. Prior to starting, ensure that the blocks required for this game are prepared.
The source code of the program is located in /home/ubuntu/ros2_ws/src/example/example/color_sorting/color_sorting_node.py
Operation Steps
Note
The entered command should be case sensitive and “Tab” key can be used to complement the key words.
(1) Start JetRover and connect it to NoMachine.
(2) Double click on to start the command line terminal.
(3) Input the command and press Enter to disable the app service.
sudo systemctl stop start_app_node.service
(4) Input the command and press Enter to start the program.
ros2 launch example color_sorting_node.launch.py debug:=true
(5) Before recognizing and picking up objects, the robotic arm will go through a calibration phase. During this phase, the arm performs a downward grasping motion with the gripper open. Place the colored block in the center of the open gripper at this time.
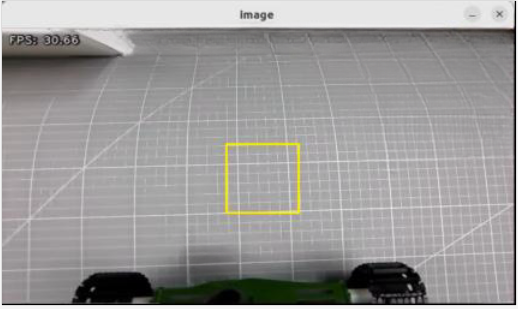
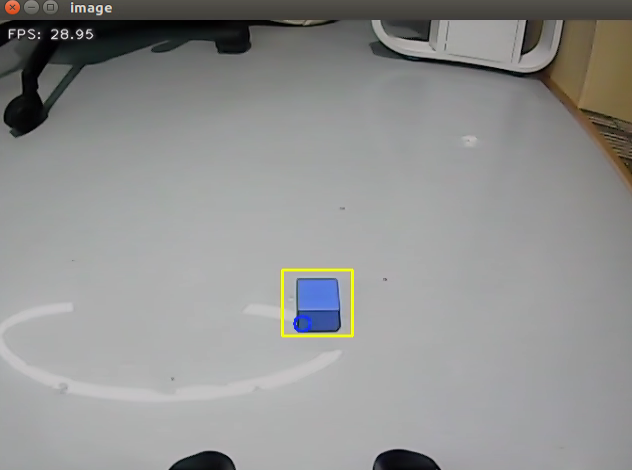
(6) The robotic arm will lift up and be in a ready-to-recognize state. Once calibration is complete, the red box in the image will change to yellow, marking the recognition area. The colored block will only be recognized and picked up if it is within this yellow area.
(7) To close this feature, press ‘Ctrl+C’ in the terminal window. If it fails, open a new command-line terminal and enter the command to stop all ROS functions currently running.
~/.stop_ros.sh
Outcome
After the game starts, the robotic arm turns left to prepare itself for the sorting. Place the target block within the yellow box in the middle of the transmitted image. Once the block is recognized, the robotic am will transport them to their corresponding areas.
The red color block will be transported to the position directly in front and center of the robot; the green color block will be transported to the position in front of the robot, towards its left side; the blue color block will be transported to the position in front of the robot, towards its right side.
Program Analysis
(1) Launch analysis

The program is saved in ros2_ws/src/example/example/color_sorting/color_sorting_node.launch.py
① Initiate other Launch files
24 25 26 27 28 29 30 31 32 33 34 | color_detect_launch = IncludeLaunchDescription( PythonLaunchDescriptionSource( os.path.join(example_package_path, 'example/color_detect/color_detect_node.launch.py')), launch_arguments={ 'enable_roi_display': debug, }.items(), ) controller_launch = IncludeLaunchDescription( PythonLaunchDescriptionSource( os.path.join(controller_package_path, 'launch/controller.launch.py')), ) |
color_detect_launch is used to launch color recognition.
controller_launch is used to launch control of the base, servos, and other components.
② Start Node
36 37 38 39 40 41 | color_sorting_node = Node( package='example', executable='color_sorting', output='screen', parameters=[os.path.join(example_package_path, 'config/color_sorting_roi.yaml'), {'start': start, 'debug': debug, 'broadcast': broadcast}] ) |
color_sorting_node is employed to initiate the color sorting node.
(2) Code analysis

Program path: ros2_ws/src/example/example/color_sorting/color_sorting_node.py
① Main Function
243 244 245 246 247 248 | def main(): node = ColorSortingNode('color_sorting') executor = MultiThreadedExecutor() executor.add_node(node) executor.spin() node.destroy_node() |
The main function calls the hand recognition class to start the node.
② ColorSortingNode
init_process:
66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 | def init_process(self): self.timer.cancel() if self.debug: if self.camera_type == 'Dabai': self.pick_roi = [200, 340, 240, 400] else: self.pick_roi = [320, 460, 240, 400] self.controller.run_action('pick_debug') time.sleep(5) self.controller.run_action('pick_init') time.sleep(2) if self.get_parameter('start').value: self.start_srv_callback(Trigger.Request(), Trigger.Response()) threading.Thread(target=self.pick, daemon=True).start() threading.Thread(target=self.main, daemon=True).start() self.create_service(Trigger, '~/init_finish', self.get_node_state) self.get_logger().info('\033[1;32m%s\033[0m' % 'start') |
Initializes arm movements and starts the pick function and main function in multiple threads, then publishes the current node state.
get_node_state:
86 87 88 | def get_node_state(self, request, response): response.success = True return response |
Works in conjunction with init_process to initialize the node state.
shutdown:
90 91 | def shutdown(self, signum, frame): self.running = False |
Callback function to shut down the program; sets the running parameter to false and terminates the program.
send_request:
93 94 95 96 97 | def send_request(self, client, msg): future = client.call_async(msg) while rclpy.ok(): if future.done() and future.result(): return future.result() |
Publishes the recognized hand position to the kinematics node and receives servo angle feedback from kinematics.
start_srv_callback:
99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 | def start_srv_callback(self, request, response): self.get_logger().info('\033[1;32m%s\033[0m' % "start color sorting") roi = ROI() roi.x_min = self.pick_roi[2] - 20 roi.x_max = self.pick_roi[3] + 20 roi.y_min = self.pick_roi[0] - 20 roi.y_max = self.pick_roi[1] + 20 msg = SetCircleROI.Request() msg.data = roi res = self.send_request(self.set_roi_client, msg) if res.success: self.get_logger().info('\033[1;32m%s\033[0m' % 'set roi success') else: self.get_logger().info('\033[1;32m%s\033[0m' % 'set roi fail') msg = SetColorDetectParam.Request() msg_red = ColorDetect() msg_red.color_name = 'red' msg_red.detect_type = 'circle' msg_green = ColorDetect() msg_green.color_name = 'green' msg_green.detect_type = 'circle' msg_blue = ColorDetect() msg_blue.color_name = 'blue' msg_blue.detect_type = 'circle' msg.data = [msg_red, msg_green, msg_blue] res = self.send_request(self.set_color_client, msg) if res.success: self.get_logger().info('\033[1;32m%s\033[0m' % 'set color success') else: self.get_logger().info('\033[1;32m%s\033[0m' % 'set color fail') self.start = True response.success = True response.message = "start" return response |
Upon invocation, reads ROI parameters, sets the desired color for picking, publishes color information to the color recognition node, and starts the sorting process.
stop_srv_callback:
137 138 139 140 141 142 143 144 145 146 147 148 | def stop_srv_callback(self, request, response): self.get_logger().info('\033[1;32m%s\033[0m' % "stop color sorting") self.start = False res = self.send_request(self.set_color_client, SetColorDetectParam.Request()) if res.success: self.get_logger().info('\033[1;32m%s\033[0m' % 'set color success') else: self.get_logger().info('\033[1;32m%s\033[0m' % 'set color fail') response.success = True response.message = "stop" return response |
Upon invocation, stops the current program and publishes empty information to the color recognition node to halt recognition.
get_color_callback:
150 151 152 153 154 155 156 157 158 159 | def get_color_callback(self, msg): data = msg.data if data != []: if data[0].radius > 10: self.center = data[0] self.color = data[0].color else: self.color = '' else: self.color = '' |
Upon invocation, reads the color of the knife recognized by the color recognition node.
pick:
161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 | def pick(self): while self.running: if self.start_pick: self.stop_srv_callback(Trigger.Request(), Trigger.Response()) self.get_logger().info('\033[1;32mcolor: %s\033[0m' % self.target_color) if self.target_color == 'red': self.controller.run_action('pick') if self.broadcast: voice_play.play('red', language=self.language) self.controller.run_action('place_center') elif self.target_color == 'green': self.controller.run_action('pick') if self.broadcast: voice_play.play('green', language=self.language) self.controller.run_action('place_left') elif self.target_color == 'blue': self.controller.run_action('pick') if self.broadcast: voice_play.play('blue', language=self.language) self.controller.run_action('place_right') self.start_pick = False self.controller.run_action('pick_init') time.sleep(0.5) self.start_srv_callback(Trigger.Request(), Trigger.Response()) else: time.sleep(0.01) |
Upon invocation, uses action groups for gripping, runs different action groups based on recognized colors, and places objects in three different positions.
main:
188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 | def main(self): count = 0 while self.running: try: image = self.image_queue.get(block=True, timeout=1) except queue.Empty: if not self.running: break else: continue if self.color in ['red', 'green', 'blue'] and self.start: if self.pick_roi[2] < self.center.x < self.pick_roi[3] and self.pick_roi[0] < self.center.y < self.pick_roi[1] and not self.start_pick and not self.debug: self.count += 1 if self.count > 30: self.count = 0 self.target_color = self.color self.start_pick = True elif self.debug: count += 1 if count > 50: count = 0 self.pick_roi = [self.center.y - 10, self.center.y + 10, self.center.x - 10, self.center.x + 10] data = {'/**': {'ros__parameters': {'roi': {}}}} roi = data['/**']['ros__parameters']['roi'] roi['x_min'] = self.pick_roi[2] roi['x_max'] = self.pick_roi[3] roi['y_min'] = self.pick_roi[0] roi['y_max'] = self.pick_roi[1] common.save_yaml_data(data, '/home/ubuntu/ros2_ws/src/example/config/color_sorting_roi.yaml') self.start_srv_callback(Trigger.Request(), Trigger.Response()) self.debug = False self.get_logger().info(str([self.center.y - 10, self.center.y + 10, self.center.x - 10, self.center.x + 10])) cv2.rectangle(image, (self.center.x - 25, self.center.y - 25,), (self.center.x + 25, self.center.y + 25), (0, 0, 255), 2) else: count = 0 if image is not None: if not self.start_pick and not self.debug: cv2.rectangle(image, (self.pick_roi[2] - 25, self.pick_roi[0] - 25), (self.pick_roi[3] + 25, self.pick_roi[1] + 25), (0, 255, 255), 2) cv2.imshow('image', image) key = cv2.waitKey(1) if key == ord('q') or key == 27: # Press q or esc to exit(按q或者esc退出) self.running = False self.controller.run_action('init') rclpy.shutdown() |
Upon invocation, determines whether sorting should begin based on required colors and ROI.
image_callback:
233 234 235 236 237 238 239 240 241 | def image_callback(self, ros_image): rgb_image = np.ndarray(shape=(ros_image.height, ros_image.width, 3), dtype=np.uint8, buffer=ros_image.data) # Original RGB image(原始 RGB 画面) if self.image_queue.full(): # If the queue is full, discard the oldest image(如果队列已满,丢弃最旧的图像) self.image_queue.get() # Put the image into the queue(将图像放入队列) self.image_queue.put(rgb_image) |
Upon invocation, receives camera data and places it in a queue for easy access.
7.2.3 Color Tracking
Program Logic
The first-person view is the perspective of the robot itself. In this game, robot will take the first-person view to complete the color tracking task.
Before starting the game, prepare yourself the required colored blocks.
First of all, subscribe to the topic messages published by color recognition node to obtain the color information.
Subsequently, after matching the target color, obtain the center of the target image.
Finally, by using inverse kinematics, calculate the required angle to align the center position of the screen with the center of the target image. Publish the corresponding topic message, control the servo motion and make the robotic arm follow the movement of the target.
The source code of the program is stored in: /home/ubuntu/ros2_ws/src/example/example/color_track/color_track_node.py
Operation Steps
Note
The input command should be case sensitive, and the “Tab” key can be used to complement the key words.
(1) Start JetRover and connect it to NoMachine.
(2) Double click on to start the command line terminal.
(3) Input the command and press Enter to disable the app service.
sudo systemctl stop start_app_node.service
(4) Input the command to start the game.
ros2 launch example color_track_node.launch.py
(5) To close this feature, press ‘Ctrl+C’ in the terminal window. If this doesn’t work, open a new command-line terminal and use the appropriate command to stop all running ROS processes.
~/.stop_ros.sh
Outcome
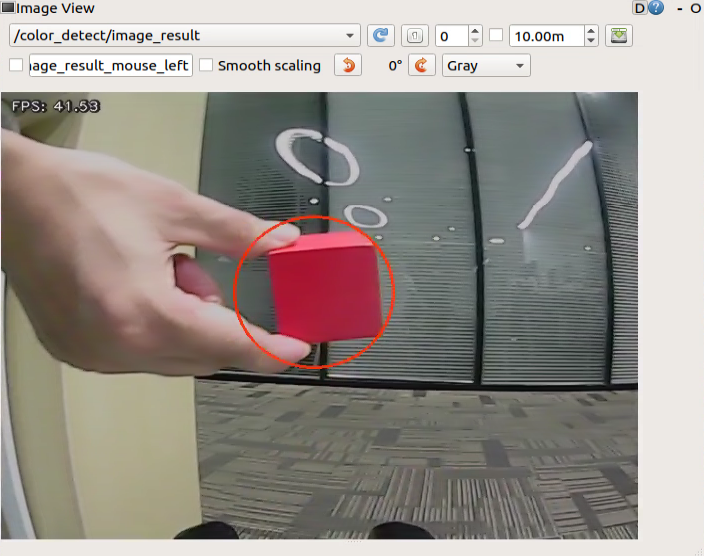
After the game starts, place the red block in front of the camera. The recognized color will be displayed in the image and the robotic arm will follow the movement of the target block.
Program Analysis
(1) Launch analysis

Program path: ros2_ws/src/example/example/color_track/color_track_node.launch.py
① Initiate other Launch files
25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 | controller_launch = IncludeLaunchDescription( PythonLaunchDescriptionSource( os.path.join(controller_package_path, 'launch/controller.launch.py')), ) kinematics_launch = IncludeLaunchDescription( PythonLaunchDescriptionSource( os.path.join(kinematics_package_path, 'launch/kinematics_node.launch.py')), ) color_detect_launch = IncludeLaunchDescription( PythonLaunchDescriptionSource( os.path.join(example_package_path, 'example/color_detect/color_detect_node.launch.py')), launch_arguments={ 'enable_display': enable_display }.items() ) |
color_detect_launch is used to launch color recognition.
controller_launch is used to launch control of the base, servos, and other components.
kinematics_launch starts the kinematics algorithm, calculating the required servo angles for the robotic arm based on the recognized information.
② Start Node
43 44 45 46 47 48 | color_track_node = Node( package='example', executable='color_track', output='screen', parameters=[{'start': start}] ) |
color_sorting_node is employed to initiate the color sorting node.
(2) Code analysis

Program path: ros2_ws/src/example/example/color_track/color_track_node.py
① Main Function
177 178 179 180 181 182 | def main(): node = ColorTrackNode('color_track') executor = MultiThreadedExecutor() executor.add_node(node) executor.spin() node.destroy_node() |
The main function calls the hand recognition class to start the node.
② ColorTrackNode
init_process:
62 63 64 65 66 67 68 69 70 71 72 73 74 | def init_process(self): self.timer.cancel() self.init_action() if self.get_parameter('start').value: self.start_srv_callback(Trigger.Request(), Trigger.Response()) request = SetString.Request() request.data = 'red' self.set_color_srv_callback(request, SetString.Response()) threading.Thread(target=self.main, daemon=True).start() self.create_service(Trigger, '~/init_finish', self.get_node_state) self.get_logger().info('\033[1;32m%s\033[0m' % 'start') |
Initializes arm movements and starts the pick function and main function in multiple threads, then publishes the current node state.
init_action:
80 81 82 83 84 85 86 87 | def init_action(self): msg = set_pose_target([self.x_init, 0.0, self.z_dis], 0.0, [-180.0, 180.0], 1.0) res = self.send_request(self.kinematics_client, msg) if res.pulse: servo_data = res.pulse set_servo_position(self.joints_pub, 1.5, ((10, 500), (5, 500), (4, servo_data[3]), (3, servo_data[2]), (2, servo_data[1]), (1, servo_data[0]))) time.sleep(1.8) self.mecanum_pub.publish(Twist()) |
Initialize all actions of the robot, returning the robotic arm to the gripping position.
get_node_state:
73 74 75 | def get_node_state(self, request, response): response.success = True return response |
Works in conjunction with init_process to initialize the node state.
shutdown:
77 78 | def shutdown(self, signum, frame): self.running = False |
Callback function to shut down the program; sets the running parameter to false and terminates the program.
send_request:
89 90 91 92 93 | def send_request(self, client, msg): future = client.call_async(msg) while rclpy.ok(): if future.done() and future.result(): return future.result() |
Publishes the recognized hand position to the kinematics node and receives servo angle feedback from kinematics.
set_color_srv_callback:
95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 | def set_color_srv_callback(self, request, response): self.get_logger().info('\033[1;32m%s\033[0m' % "set_color") msg = SetColorDetectParam.Request() msg_red = ColorDetect() msg_red.color_name = request.data msg_red.detect_type = 'circle' msg.data = [msg_red] res = self.send_request(self.set_color_client, msg) if res.success: self.get_logger().info('\033[1;32m%s\033[0m' % 'start_track_%s'%msg_red.color_name) else: self.get_logger().info('\033[1;32m%s\033[0m' % 'track_fail') response.success = True response.message = "set_color" return response |
Used to set the target color for recognition, configured through a service.
start_srv_callback:
111 112 113 114 115 116 | def start_srv_callback(self, request, response): self.get_logger().info('\033[1;32m%s\033[0m' % "start color track") self.start = True response.success = True response.message = "start" return response |
Upon invocation, reads ROI parameters, sets the desired color for picking, publishes color information to the color recognition node, and starts the sorting process.
stop_srv_callback:
{lineno-start=}
def stop_srv_callback(self, request, response):
self.get_logger().info('\033[1;32m%s\033[0m' % "stop color track")
self.start = False
res = self.send_request(ColorDetect.Request())
if res.success:
self.get_logger().info('\033[1;32m%s\033[0m' % 'set color success')
else:
self.get_logger().info('\033[1;32m%s\033[0m' % 'set color fail')
response.success = True
response.message = "stop"
return response
Upon invocation, stops the current program and publishes empty information to the color recognition node to halt recognition.
get_color_callback:
130 131 132 133 134 135 136 137 | def get_color_callback(self, msg): if msg.data != []: if msg.data[0].radius > 10: self.center = msg.data[0] else: self.center = None else: self.center = None |
color currently recognized by the color recognition node.
main:
139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 | def main(self): while self.running: if self.center is not None and self.start: t1 = time.time() center = self.center self.pid_y.SetPoint = center.width/2 self.pid_y.update(center.x) self.y_dis += self.pid_y.output if self.y_dis < 200: self.y_dis = 200 if self.y_dis > 800: self.y_dis = 800 self.pid_z.SetPoint = center.height/2 self.pid_z.update(center.y) self.z_dis += self.pid_z.output if self.z_dis > 0.46: self.z_dis = 0.46 if self.z_dis < 0.36: self.z_dis = 0.36 msg = set_pose_target([self.x_init, 0.0, self.z_dis], 0.0, [-180.0, 180.0], 1.0) res = self.send_request(self.kinematics_client, msg) t2 = time.time() t = t2 - t1 if t < 0.02: time.sleep(0.02 - t) if res.pulse: servo_data = res.pulse set_servo_position(self.joints_pub, 0.02, ((10, 500), (5, 500), (4, servo_data[3]), (3, servo_data[2]), (2, servo_data[1]), (1, int(self.y_dis)))) else: set_servo_position(self.joints_pub, 0.02, ((1, int(self.y_dis)), )) else: time.sleep(0.01) self.init_action() rclpy.shutdown() |
Upon invocation, it will determine whether to start sorting based on the color to be sorted and the ROI.
Extension Function
The program defaults to recognize red. However, you can change the recognition color to green or blue through modifying the codes in corresponding program. In this section, the default recognition color is changed to green as example. The specific operation steps area as follow:
(1) Start JetRover and connect it to NoMachine.
(2) Double click on to start the command line terminal.
(3) Input the command and press Enter to access the program directory.
cd /home/ubuntu/ros2_ws/src/example/example/color_track/
(4) Input the command below to open the program file.
vim color_track_node.py
(5) Press “i” key to enter edit mode and modify the assignment of the request.data parameter to “green”.

(6) After the modification is completed, hit ‘ESC’ key and input ‘:wq’ to exit and save the program.

7.2.4 Line-Following Obstacle Clearance
Program Logic
During JetRover moves forward along the black line, it will automatically clear the obstacles around the black line.
Before the game starts, it’s necessary to affix the black line in advance and place JetRover in front of the black line. Ensure that there are no other objects of the same color around to prevent interference with recognition, and place the obstacle blocks along the black line.
Firstly, subscribe to the topic messages published by the color recognition node and Lidar node to obtain the recognition color information, captured image data, and Lidar data.
Next, obtain the coordinates of the center position of the line within the image. Calculate the deviation from the center position of the image, update the PID data, and correct the robot’s driving direction.
Finally, when obstacles are detected on the line, call the obstacle-clearing action group and remove the block obstacles.
The source code of this program is stored in /home/ubuntu/ros2_ws/src/example/example/line_follow_clean/line_follow_clean_node.py
Operation Steps
Note
The input command should be case sensitive, and the “Tab” key can be used to complement the key words.
(1) Start JetRover and connect it to NoMachine.
(2) Double click on to start the command line terminal.
(3) Input the command and press Enter to disable the app service.
sudo systemctl stop start_app_node.service
(4) Input the command to start the game.
ros2 launch example line_follow_clean_node.launch.py
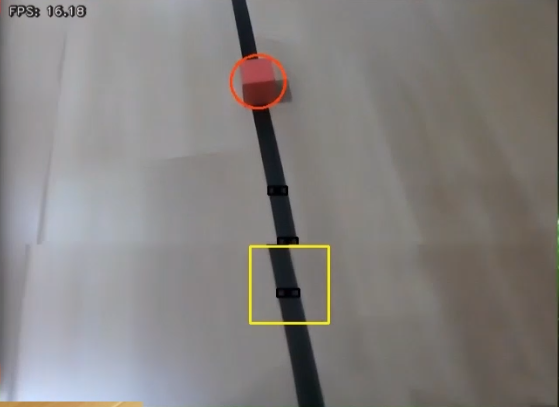
(5) The camera image interface when the program starts is shown below.
(6) To close this feature, press ‘Ctrl+C’ in the terminal window. If that doesn’t work, open a new command-line terminal and use the command to stop all running ROS processes.
~/.stop_ros.sh
Outcome
After the game starts, JetRover moves alone the recognized black line. When it encounters the colored block obstacles along the way, it will pause, grip the obstacle and place it on the left side. Afterward, it will continue moving forward.
Program Analysis
(1) Launch Analysis

Program path: ros2_ws/src/example/example/line_follow_clean/line_follow_clean_node.launch.py
① Starting Other Launch Files
23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 | lidar_launch = IncludeLaunchDescription( PythonLaunchDescriptionSource( os.path.join(peripherals_package_path, 'launch/lidar.launch.py')), ) color_detect_launch = IncludeLaunchDescription( PythonLaunchDescriptionSource( os.path.join(example_package_path, 'example/color_detect/color_detect_node.launch.py')), launch_arguments={ 'enable_roi_display': debug, }.items(), ) controller_launch = IncludeLaunchDescription( PythonLaunchDescriptionSource( os.path.join(controller_package_path, 'launch/controller.launch.py')), ) |
color_detect_launch is used to start color recognition.
controller_launch is used to start control of the base, servos, and other components.
lidar_launch starts the lidar.
② Initiate Node
40 41 42 43 44 45 | line_follow_clean_node = Node( package='example', executable='line_follow_clean', output='screen', parameters=[os.path.join(example_package_path, 'config/line_follow_clean_roi.yaml'), {'debug': debug}] ) |
line_follow_clean_node is used to start the line-following sorting node.
(2) Source code analysis

Program path: /ros2_ws/src/example/example/line_follow_clean/line_follow_clean_node.py
① Main Function
363 364 365 366 367 368 | def main(): node = LineFollowCleanNode('line_follow_clean') executor = MultiThreadedExecutor() executor.add_node(node) executor.spin() node.destroy_node() |
The main function calls the hand recognition class to start the node.
② LineFollowCleanNode
init_process:
85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 | def init_process(self): self.timer.cancel() self.mecanum_pub.publish(Twist()) self.controller.run_action('line_follow_init') if self.debug: self.controller.run_action('move_object_debug') time.sleep(5) self.controller.run_action('line_follow_init') time.sleep(2) self.start_srv_callback(Trigger.Request(), Trigger.Response()) threading.Thread(target=self.pick, daemon=True).start() threading.Thread(target=self.main, daemon=True).start() self.create_service(Trigger, '~/init_finish', self.get_node_state) self.get_logger().info('\033[1;32m%s\033[0m' % 'start') |
Initializes the robotic arm actions, starts the pick and main functions in multiple threads, and publishes the current node state.
get_node_state:
103 104 105 | def get_node_state(self, request, response): response.success = True return response |
Works in conjunction with init_process to initialize the node state.
shutdown:
107 108 | def shutdown(self, signum, frame): self.running = False |
Callback function to shut down the program, sets the running parameter to false, and terminates the program.
send_request:
110 111 112 113 114 | def send_request(self, client, msg): future = client.call_async(msg) while rclpy.ok(): if future.done() and future.result(): return future.result() |
Publishes the recognized hand position to the kinematics node and receives servo angle feedback.
start_srv_callback:
116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 | def start_srv_callback(self, request, response): self.get_logger().info('\033[1;32m%s\033[0m' % "start line follow clean") line_roi = LineROI() if self.camera_type == 'Dabai': line_roi.roi_up.x_min = 0 line_roi.roi_up.x_max = 640 line_roi.roi_up.y_min = 200 line_roi.roi_up.y_max = 210 line_roi.roi_up.scale = 0.0 line_roi.roi_center.x_min = 0 line_roi.roi_center.x_max = 640 line_roi.roi_center.y_min = 260 line_roi.roi_center.y_max = 270 line_roi.roi_center.scale = 0.1 line_roi.roi_down.x_min = 0 line_roi.roi_down.x_max = 640 line_roi.roi_down.y_min = 320 line_roi.roi_down.y_max = 330 line_roi.roi_down.scale = 0.9 else: line_roi.roi_up.x_min = 0 line_roi.roi_up.x_max = 640 line_roi.roi_up.y_min = 270 line_roi.roi_up.y_max = 280 line_roi.roi_up.scale = 0.0 line_roi.roi_center.x_min = 0 line_roi.roi_center.x_max = 640 line_roi.roi_center.y_min = 330 line_roi.roi_center.y_max = 340 line_roi.roi_center.scale = 0.1 line_roi.roi_down.x_min = 0 line_roi.roi_down.x_max = 640 line_roi.roi_down.y_min = 390 line_roi.roi_down.y_max = 400 line_roi.roi_down.scale = 0.9 msg = SetLineROI.Request() msg.data = line_roi res = self.send_request(self.set_line_client, msg) if res.success: self.get_logger().info('set roi success') else: self.get_logger().info('set roi fail') object_roi = ROI() object_roi.x_min = 0 object_roi.x_max = 640 if self.camera_type == 'Dabai': object_roi.y_min = 100 object_roi.y_max = 300 else: object_roi.y_min = 220 object_roi.y_max = 420 msg = SetCircleROI.Request() msg.data = object_roi res = self.send_request(self.set_circle_client, msg) if res.success: self.get_logger().info('set roi success') else: self.get_logger().info('set roi fail') msg_black = ColorDetect() msg_black.color_name = self.line_color msg_black.detect_type = 'line' msg_blue = ColorDetect() msg_blue.color_name = self.object_blue msg_blue.detect_type = 'circle' msg_red = ColorDetect() msg_red.color_name = self.object_red msg_red.detect_type = 'circle' msg_green = ColorDetect() msg_green.color_name = self.object_green msg_green.detect_type = 'circle' msg = SetColorDetectParam.Request() msg.data = [msg_red, msg_green, msg_blue, msg_black] res = self.send_request(self.set_color_client, msg) if res.success: self.get_logger().info('set color success') else: self.get_logger().info('set color fail') response.success = True response.message = "start" return response |
Upon invocation, reads ROI parameters, sets the desired color for picking, publishes color information to the color recognition node, and starts the sorting process.
stop_srv_callback:
205 206 207 208 209 210 211 212 213 214 215 | def stop_srv_callback(self, request, response): self.get_logger().info('\033[1;32m%s\033[0m' % "stop line follow clean") res = self.send_request(self.set_color_client, SetColorDetectParam.Request()) if res.success: self.get_logger().info('set color success') else: self.get_logger().info('set color fail') response.success = True response.message = "stop" return response |
Upon invocation, stops the current program and publishes empty information to the color recognition node to halt recognition.
get_color_callback:
217 218 219 220 221 222 223 224 225 226 | def get_color_callback(self, msg): line_x = None center = None for i in msg.data: if i.color == self.line_color: line_x = i.x elif i.color == self.object_blue or i.color == self.object_red or i.color == self.object_green: center = i self.temp_line_x = line_x self.temp_center = center |
Upon invocation, reads the color currently recognized by the color recognition node.
pick:
228 229 230 231 232 233 234 235 236 237 238 239 240 | def pick(self): while self.running: if self.start_pick: self.stop_srv_callback(Trigger.Request(), Trigger.Response()) self.mecanum_pub.publish(Twist()) time.sleep(0.5) self.controller.run_action('move_object') self.controller.run_action('line_follow_init') time.sleep(0.5) self.start_pick = False self.start_srv_callback(Trigger.Request(), Trigger.Response()) else: time.sleep(0.01) |
Upon invocation, executes the picking and obstacle clearing action groups.
main:
242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 | def main(self): count = 0 while self.running: try: image = self.image_queue.get(block=True, timeout=1) except queue.Empty: if not self.running: break else: continue self.line_x = self.temp_line_x self.center = self.temp_center if self.line_x is not None and not self.start_pick: twist = Twist() if self.center is not None: if self.center.y > 100 and abs(self.center.x - self.line_x) < 100 and not self.debug: self.pid_x.SetPoint = (self.pick_roi[1] + self.pick_roi[0])/2 self.pid_x.update(self.center.y) self.pid.SetPoint = (self.pick_roi[2] + self.pick_roi[3])/2 self.pid.update(self.center.x) twist.linear.x = common.set_range(self.pid_x.output, -0.1, 0.1) twist.angular.z = common.set_range(self.pid.output, -0.5, 0.5) if abs(twist.linear.x) <= 0.0065 and abs(twist.angular.z) <= 0.05: self.count += 1 time.sleep(0.01) if self.count > 50: self.count = 0 self.start_pick = True else: self.count = 0 elif self.debug: count += 1 if count > 50: count = 0 self.pick_roi = [self.center.y - 15, self.center.y + 15, self.center.x - 15, self.center.x + 15] data = {'/**': {'ros__parameters': {'roi': {}}}} roi = data['/**']['ros__parameters']['roi'] roi['x_min'] = self.pick_roi[2] roi['x_max'] = self.pick_roi[3] roi['y_min'] = self.pick_roi[0] roi['y_max'] = self.pick_roi[1] common.save_yaml_data(data, os.path.join( os.path.abspath(os.path.join(os.path.split(os.path.realpath(__file__))[0], '../..')), 'config/line_follow_clean_roi.yaml')) self.debug = False self.start_srv_callback(Trigger.Request(), Trigger.Response()) self.get_logger().info(str([self.center.y - 15, self.center.y + 15, self.center.x - 15, self.center.x + 15])) cv2.rectangle(image, (self.center.x - 25, self.center.y - 25,), (self.center.x + 25, self.center.y + 25), (0, 0, 255), 2) else: self.pid.SetPoint = 320 self.pid.update(self.line_x) twist.linear.x = 0.08 twist.angular.z = common.set_range(self.pid.output, -0.8, 0.8) elif not self.debug: self.pid.SetPoint = 320 self.pid.update(self.line_x) twist.linear.x = 0.15 twist.angular.z = common.set_range(self.pid.output, -0.8, 0.8) if not self.stop: self.mecanum_pub.publish(twist) else: self.mecanum_pub.publish(Twist()) else: self.mecanum_pub.publish(Twist()) time.sleep(0.01) if image is not None: if not self.start_pick and not self.debug: cv2.rectangle(image, (self.pick_roi[2] - 30, self.pick_roi[0] - 30), (self.pick_roi[3] + 30, self.pick_roi[1] + 30), (0, 255, 255), 2) cv2.imshow('image', image) key = cv2.waitKey(1) if key == ord('q') or key == 27: # Press q or esc to exit(按q或者esc退出) self.running = False self.mecanum_pub.publish(Twist()) self.controller.run_action('line_follow_init') rclpy.shutdown() |
Upon invocation, determines whether to start sorting based on the required colors and ROI.
image_callback:
318 319 320 321 322 323 324 325 | def image_callback(self, ros_image): cv_image = self.bridge.imgmsg_to_cv2(ros_image, "bgr8") rgb_image = np.array(cv_image, dtype=np.uint8) if self.image_queue.full(): # If the queue is full, discard the oldest image(如果队列已满,丢弃最旧的图像) self.image_queue.get() # Put the image into the queue(将图像放入队列) self.image_queue.put(rgb_image) |
Reads image information and places it in a queue for easy access.
lidar_callback:
327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 | def lidar_callback(self, lidar_data): # Data size = Scanning angle / Angle added per scan(数据大小 = 扫描角度/每扫描一次增加的角度) if self.lidar_type != 'G4': max_index = int(math.radians(MAX_SCAN_ANGLE / 2.0) / lidar_data.angle_increment) left_ranges = lidar_data.ranges[:max_index] # Left half of the data(左半边数据) right_ranges = lidar_data.ranges[::-1][:max_index] # Right half of the data(右半边数据) elif self.lidar_type == 'G4': min_index = int(math.radians((360 - MAX_SCAN_ANGLE) / 2.0) / lidar_data.angle_increment) max_index = min_index + int(math.radians(MAX_SCAN_ANGLE / 2.0) / lidar_data.angle_increment) left_ranges = lidar_data.ranges[::-1][min_index:max_index][::-1] # The left data(左半边数据) right_ranges = lidar_data.ranges[min_index:max_index][::-1] # The right data(右半边数据) # Get data based on the settings(根据设定取数据) angle = self.scan_angle / 2 angle_index = int(angle / lidar_data.angle_increment + 0.50) left_range, right_range = np.array(left_ranges[:angle_index]), np.array(right_ranges[:angle_index]) left_nonzero = left_range.nonzero() right_nonzero = right_range.nonzero() left_nonan = np.isfinite(left_range[left_nonzero]) right_nonan = np.isfinite(right_range[right_nonzero]) # Take the nearest distance left and right(取左右最近的距离) min_dist_left_ = left_range[left_nonzero][left_nonan] min_dist_right_ = right_range[right_nonzero][right_nonan] if len(min_dist_left_) > 1 and len(min_dist_right_) > 1: min_dist_left = min_dist_left_.min() min_dist_right = min_dist_right_.min() if min_dist_left < self.stop_threshold or min_dist_right < self.stop_threshold: self.stop = True else: self.count_stop += 1 if self.count_stop > 5: self.count_stop = 0 self.stop = False# lidar_callback code here |
Reads Lidar information, processes data based on the model, and calculates the nearest position.
Gripping Adjustment
In the program, the recognition and gripping area are located in the middle of the image by default, no need for adjustment. However, due to the discrepancy in camera parameters, there might be cases where the robot arm cannot grip the color black. In such situations, you can adjust the position of this area using commands. Here are the specific steps:
(1) Start JetRover and connect it to NoMachine.
(2) Double click on to open the command line terminal.
(3) Input the command and hit Enter key to initiate testing program.
ros2 launch example line_follow_clean_node.launch.py debug:=true
(4) This mode will disable the line-following function while keeping the color block gripping function active. Place the color block in the center of the gripper when the robotic arm reaches the gripping position. Wait for the arm to reset and mark the recognition box’s position. Then, wait for the arm to execute the gripping action. After calibration, the terminal will display the pixel coordinates of the color block in the image along with a completion message.
(5) Finally, run the program according to “Operation Steps”.
7.2.5 Waste Sorting
Program Logic
Waste sorting involves the robot recognizing waste cards in front of the camera, and transporting them to the fixed waste card classification areas.
Before the game, prepare the waste cards. You can find the image collection of the waste cards under the same directory and print them out.
First, subscribe to the topic massage published by the YOLOv5 target detection node to obtain the recognized card information and the card images.
Next, match the obtained card information to find out the corresponding waste classification.
Finally, based on the waste classification, execute the corresponding sorting action group to complete the task.
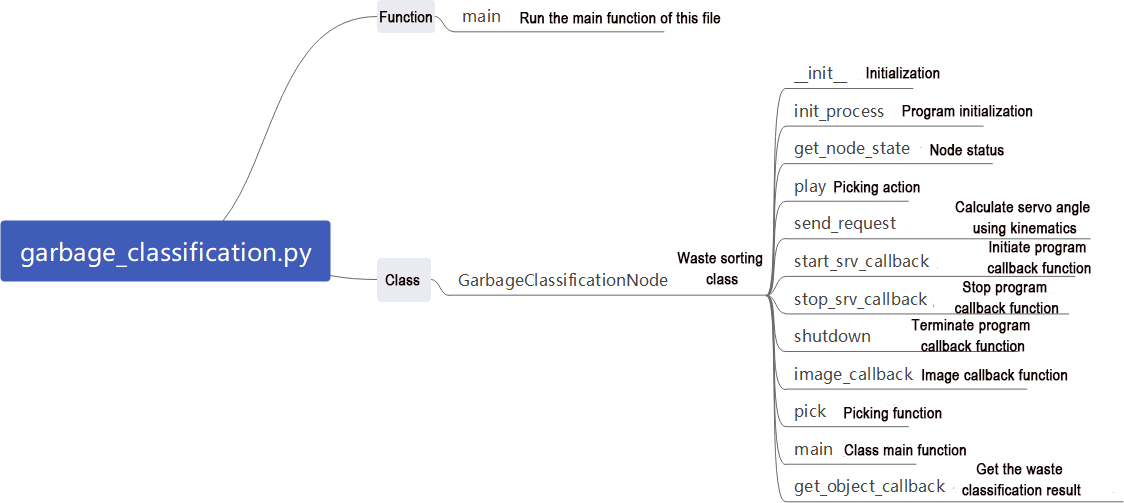
The source code of the program is stored in /home/ubuntu/ros2_ws/src/example/example/garbage_classification/garbage_classification.py
Operation Steps
Note
The input command should be case sensitive, and the “Tab” key can be used to complement the key words.
(1) Start JetRover and connect it to NoMachine.
(2) Double click on to start the command line terminal.
(3) Input the command and press Enter to disable the app auto-start service.
sudo systemctl stop start_app_node.service
(4) Enter the command and press Enter key to start the garbage sorting mode:
ros2 launch example garbage_classification.launch.py debug:=true
(5) Before the robotic arm begins the identification and grasping process, it first undergoes a calibration phase. During this phase, the arm performs a downward grasping motion with the gripper open. At this point, the piece of waste wood should be positioned in the center of the gripper.

(6) The robotic arm will then lift upward and enter the identification mode. On the remote interface, the software will display a red box that highlights the area currently being calibrated and identified.

The program uses colored boxes to identify different objects and cards. Each object’s name is accompanied by a number less than 1 that indicates the recognition accuracy. For instance, a number like 0.96 next to “BananaPeel” reflects the accuracy of the recognition, with the range being from 0 to 1. A higher number signifies greater accuracy in identifying the object as a BananaPeel. Recognition accuracy typically improves in well-lit conditions.
(7) Once calibration is complete, the red box in the image will turn yellow to indicate the recognition area. Only waste cards or wood blocks placed within this yellow area will be identified and grasped.
(8) To exit this mode, press “Ctrl+C” in the terminal. If that doesn’t work, open a new command line terminal and enter the command to stop all running ROS functions.
~/.stop_ros.sh
Outcome
After the game starts, JetRover recognizes the waste card within the image. Then place the waste card within the yellow box on the image, the robotic arm will grip the card and transport it to the respective waste classification area.
Program Analysis
(1) Launch Analysis

Program path: /ros2_ws/src/example/example/garbage_classification/garbage_classification.launch.py
① Launching Other Launch Files
31 32 33 34 | controller_launch = IncludeLaunchDescription( PythonLaunchDescriptionSource( os.path.join(controller_package_path, 'launch/controller.launch.py')), ) |
controller_launch is used to start control of the base, servos, and other components.
② Starting Node
44 45 46 47 48 49 | garbage_classification_node = Node( package='example', executable='garbage_classification', output='screen', parameters=[os.path.join(example_package_path, 'config/garbage_classification_roi.yaml'), {'start': start}, {'debug': debug}, {'broadcast': broadcast}], ) |
garbage_classification_node is used to start the garbage classification node.
(2) Source Code Analysis
Program path: /ros2_ws/src/example/example/garbage_classification/garbage_classification.py
① Main Function
224 225 226 227 228 229 230 | def main(): node = GarbageClassificationNode('garbage_classification') executor = MultiThreadedExecutor() executor.add_node(node) executor.spin() node.destroy_node() rclpy.shutdown() |
The main function calls the hand recognition class to start the node.
② GarbageClassificationNode
init_process:
73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 | def init_process(self): self.timer.cancel() self.mecanum_pub.publish(Twist()) self.controller.run_action('garbage_pick_init') if self.debug: self.pick_roi = [30, 450, 30, 610] self.controller.run_action('garbage_pick_debug') time.sleep(5) self.controller.run_action('garbage_pick_init') time.sleep(2) if self.get_parameter('start').value: self.start_srv_callback(Trigger.Request(), Trigger.Response()) threading.Thread(target=self.pick, daemon=True).start() threading.Thread(target=self.main, daemon=True).start() self.create_service(Trigger, '~/init_finish', self.get_node_state) self.get_logger().info('\033[1;32m%s\033[0m' % 'start') |
Initializes the robotic arm actions, starts the pick and main functions in multiple threads, and publishes the current node state.
get_node_state:
93 94 95 | def get_node_state(self, request, response): response.success = True return response |
Works in conjunction with init_process to initialize the node state.
play:
97 98 99 | def play(self, name): if self.broadcast: voice_play.play(name, language=self.language) |
Upon invocation, plays the corresponding category of garbage voice prompt.
shutdown:
121 122 | def shutdown(self, signum, frame): self.running = False |
Callback function to shut down the program; sets the running parameter to false and terminates the program.
send_request:
101 102 103 104 105 | def send_request(self, client, msg): future = client.call_async(msg) while rclpy.ok(): if future.done() and future.result(): return future.result() |
Publishes the recognized hand position to the kinematics node and receives servo angle feedback.
start_srv_callback:
107 108 109 110 111 112 113 | def start_srv_callback(self, request, response): self.get_logger().info('\033[1;32m%s\033[0m' % "start garbage classification") self.send_request(self.start_yolov5_client, Trigger.Request()) response.success = True response.message = "start" return response |
Upon invocation, starts YOLOv5 recognition for garbage classification, providing feedback on the current program status.
stop_srv_callback:
115 116 117 118 119 120 | def stop_srv_callback(self, request, response): self.get_logger().info('\033[1;32m%s\033[0m' % "stop garbage classification") self.send_request(self.stop_yolov5_client, Trigger.Request()) response.success = True response.message = "stop" return response |
Upon invocation, stops the current program and halts YOLOv5 recognition.
image_callback:
124 125 126 127 128 129 130 131 | def image_callback(self, ros_image): cv_image = self.bridge.imgmsg_to_cv2(ros_image, "bgr8") bgr_image = np.array(cv_image, dtype=np.uint8) if self.image_queue.full(): # If the queue is full, discard the oldest image(如果队列已满,丢弃最旧的图像) self.image_queue.get() # Put the image into the queue(将图像放入队列) self.image_queue.put(bgr_image)# image_callback code here |
Reads image information and places it in a queue for easy access.
pick:
133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 | def pick(self): while self.running: waste_category = None if self.start_pick: time.sleep(0.2) for k, v in WASTE_CLASSES.items(): if self.current_class_name in v: waste_category = k break self.class_name = None self.get_logger().info('\033[1;32m%s\033[0m' % waste_category) self.stop_srv_callback(Trigger.Request(), Trigger.Response()) self.controller.run_action('garbage_pick') if waste_category == 'food_waste': self.play('food_waste') self.controller.run_action('place_food_waste') elif waste_category == 'hazardous_waste': self.play('hazardous_waste') self.controller.run_action('place_hazardous_waste') elif waste_category == 'recyclable_waste': self.play('recyclable_waste') self.controller.run_action('place_recyclable_waste') elif waste_category == 'residual_waste': self.play('residual_waste') self.controller.run_action('place_residual_waste') self.controller.run_action('garbage_pick_init') time.sleep(0.5) self.start_pick = False self.start_srv_callback(Trigger.Request(), Trigger.Response()) else: time.sleep(0.01) |
Upon invocation, calls the corresponding action group based on the recognized garbage category.
main:
165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 | def main(self): count = 0 while self.running: try: image = self.image_queue.get(block=True, timeout=1) except queue.Empty: if not self.running: break else: continue if self.class_name is not None and not self.start_pick and not self.debug: self.count += 1 if self.count > 10: self.current_class_name = self.class_name self.start_pick = True self.count = 0 elif self.debug and self.class_name is not None: count += 1 if count > 50: count = 0 self.pick_roi = [self.center[1] - 15, self.center[1] + 15, self.center[0] - 15, self.center[0] + 15] data = {'/**': {'ros__parameters': {'roi': {}}}} roi = data['/**']['ros__parameters']['roi'] roi['x_min'] = self.pick_roi[2] roi['x_max'] = self.pick_roi[3] roi['y_min'] = self.pick_roi[0] roi['y_max'] = self.pick_roi[1] common.save_yaml_data(data, os.path.join( os.path.abspath(os.path.join(os.path.split(os.path.realpath(__file__))[0], '../..')), 'config/garbage_classification_roi.yaml')) self.debug = False self.get_logger().info(str([self.center[1] - 15, self.center[1] + 15, self.center[0] - 15, self.center[0] + 15])) cv2.rectangle(image, (self.center[0] - 45, self.center[1] - 45), (self.center[0] + 45, self.center[1] + 45), (0, 0, 255), 2) else: self.count = 0 time.sleep(0.01) if image is not None: if not self.start_pick and not self.debug: cv2.rectangle(image, (self.pick_roi[2] - 30, self.pick_roi[0] - 30), (self.pick_roi[3] + 30, self.pick_roi[1] + 30), (0, 255, 255), 2) cv2.imshow('image', image) key = cv2.waitKey(1) if key == ord('q') or key == 27: # Press q or esc to exit(按q或者esc退出) self.running = False self.mecanum_pub.publish(Twist()) self.controller.run_action('garbage_pick_init') |
Upon invocation, determines whether to start sorting based on the required colors and ROI.
get_object_callback:
211 212 213 214 215 216 217 218 219 220 221 | def get_object_callback(self, msg): objects = msg.objects if objects == []: self.center = None self.class_name = None else: for i in objects: center = (int((i.box[0] + i.box[2])/2), int((i.box[1] + i.box[3])/2)) if self.pick_roi[2] < center[0] < self.pick_roi[3] and self.pick_roi[0] < center[1] < self.pick_roi[1]: self.center = center self.class_name = i.class_name |
Reads recognition information from YOLOv5.
7.2.6 Fixed Point Navigation
Program Logic
First, subscribe to the topics published by the camera node to obtain images.
Next, activate the navigation service to receive the location information of the destination.
Finally, upon reaching the destination and detecting the target block, the servo control node publishes topic messages to command the robotic arm to complete the gripping and transporting tasks.
Operation Steps
Note
The input command should be case sensitive, and the “Tab” key can be used to complement the key words.
(1) Before starting the game, it’s necessary to complete the mapping task in the field of the navigation and transportation, prepare the colored blocks and mark the placement position in red within the area. To get detailed introduction to mapping function, please refer to the tutorials saved in: 4 Mapping & Navigation Course\4.1 Mapping
(2) Start JetRover and connect it to NoMachine.
(3) Click-on  to start the command-line terminal.
to start the command-line terminal.
(4) Input the command and press Enter to disable the app service.
sudo systemctl stop start_app_node.service
(5) Input the command to start the game.
ros2 launch example navigation_transport.launch.py map:=map_01
Note
By default, after gripping the colored block, the robot will directly place ti down upon reaching the next target point. If you need to place it at a specific target location, you can add place_without_color:=false to the end of the command.
(6) To exit this mode, press “Ctrl+C” in the terminal. If that doesn’t work, open a new command line terminal and enter the command to stop all current ROS processes.
~/.stop_ros.sh
Outcome
After opening RVIZ, you need to first check if the position of the robot on the map aligns with its actual potion. If they do not align, manual adjustment may be required. You can utilize the “2D Pose Estimate” tool in RVIZ to perform this adjustment.
There are three tools in the menu bar, including 2D Pose Estimate, 2D Nav Goal and Publish Point.

“2D Pose Estimate” is used to set the initial position of JetRover, “2D Nav Goal” is used to set a target point and “Publish Point” is used to set multiple target points.
Click “2D Nav Goal” in the menu bar, and select one point by clicking the mouse as the target destination. After the point is set, JetRover will automatically generate the route and move toward the point.

After navigating to the location with the blue block, the robot will automatically grasp the block upon recognition. Then, it will navigate to the placement area with the red mark. Upon arrival, the robot will automatically place the block, completing the transportation task.
Note
When the program starts, it can merely complete the entire process once. If you need to perform another gripping and placing cycle, you will need to restart the game.
Program Analysis
(1) Launch analysis
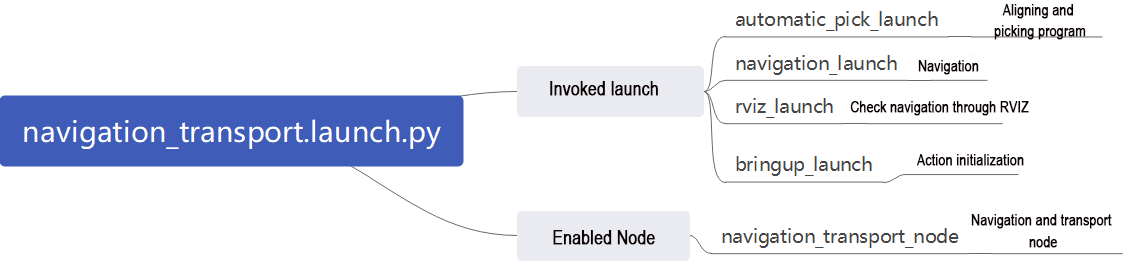
The source code of this program is located in ros2_ws/src/example/example/navigation_transport/navigation_transport.launch.py
① Start other Launch files
40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 | automatic_pick_launch = IncludeLaunchDescription( PythonLaunchDescriptionSource(os.path.join(example_package_path, 'example/navigation_transport/automatic_pick.launch.py')), launch_arguments={ 'broadcast': broadcast, 'debug': debug, 'place_without_color': place_without_color, 'place_position': place_position, 'master_name': master_name, 'robot_name': robot_name, 'enable_display': 'false', }.items(), ) navigation_launch = IncludeLaunchDescription( PythonLaunchDescriptionSource(os.path.join(navigation_package_path, 'launch/include/bringup.launch.py')), launch_arguments={ 'use_sim_time': 'false', 'map': os.path.join(slam_package_path, 'maps', map_name + '.yaml'), 'params_file': os.path.join(navigation_package_path, 'config', 'nav2_params.yaml'), 'namespace': robot_name, 'use_namespace': 'false', 'autostart': 'true', }.items(), ) navigation_transport_node = Node( package='example', executable='navigation_transport', output='screen', parameters=[{'map_frame': 'map', 'nav_goal': '/nav_goal'}] ) rviz_node = ExecuteProcess( cmd=['rviz2', 'rviz2', '-d', os.path.join(navigation_package_path, 'rviz/navigation_transport.rviz')], output='screen' ) bringup_launch = GroupAction( actions=[ PushRosNamespace(robot_name), automatic_pick_launch, TimerAction( period=10.0, # 延时等待其它节点启动好(wait for other nodes to start up with a delay) actions=[navigation_launch], ), ] ) |
automatic_pick_launch: Automatically picks up items based on color alignment.
navigation_launch: Launches navigation.
rviz_launch: Uses RVIZ to visualize navigation effects.
bringup_launch: Initializes actions.
② Start the Node
65 66 67 68 69 70 | navigation_transport_node = Node( package='example', executable='navigation_transport', output='screen', parameters=[{'map_frame': 'map', 'nav_goal': '/nav_goal'}] ) |
navigation_transport_node: Starts the navigation transport node.
(2) Source Code Analysis
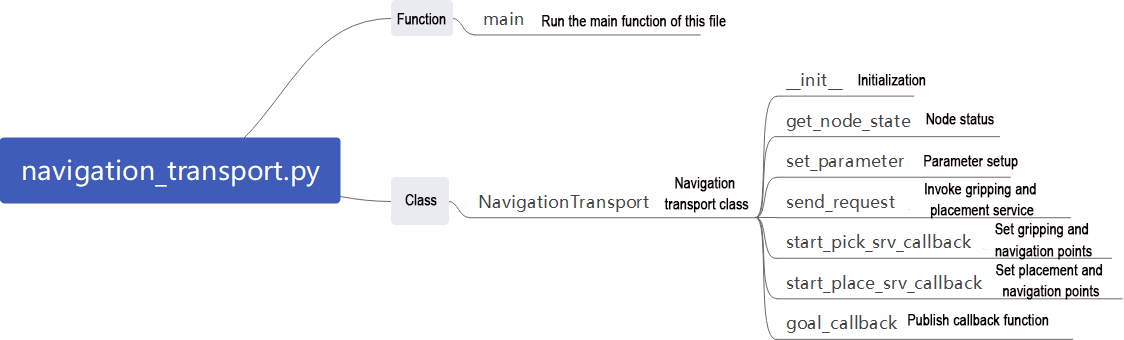
Program Path: ros2_ws/src/example/example/navigation_transport/navigation_transport.py
① Main Function
244 245 246 247 248 249 | def main(): node = NavigationTransport('navigation_transport') executor = MultiThreadedExecutor() executor.add_node(node) executor.spin() node.destroy_node() |
The main function calls the hand recognition class to start the node.
② NavigationTransport
get_node_state:
61 62 63 | def get_node_state(self, request, response): response.success = True return response |
Works in conjunction with init_process to initialize the node state.
send_request:
71 72 73 74 75 | def send_request(self, client, msg): future = client.call_async(msg) while rclpy.ok(): if future.done() and future.result(): return future.result() |
Publishes certain recognized information to a specific service
start_pick_srv_callback:
77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 | def start_pick_srv_callback(self, request, response): self.get_logger().info('start navigaiton pick') marker_Array = MarkerArray() marker = Marker() marker.header.frame_id = self.map_frame marker.action = Marker.DELETEALL marker_Array.markers.append(marker) self.mark_pub.publish(marker_Array) markerArray = MarkerArray() pose = PoseStamped() pose.header.frame_id = self.map_frame pose.header.stamp = self.navigator.get_clock().now().to_msg() data = request.data q = common.rpy2qua(math.radians(data.roll), math.radians(data.pitch), math.radians(data.yaw)) pose.pose.position.x = data.x pose.pose.position.y = data.y pose.pose.orientation = q # Mark the point with number to display(用数字标记来显示点) marker = Marker() marker.header.frame_id = self.map_frame marker.type = marker.MESH_RESOURCE marker.mesh_resource = "package://example/resource/flag.dae" marker.action = marker.ADD # Size(大小) marker.scale.x = 0.08 marker.scale.y = 0.08 marker.scale.z = 0.2 # Color(颜色) color = list(np.random.choice(range(256), size=3)) marker.color.a = 1.0 marker.color.r = color[0] / 255.0 marker.color.g = color[1] / 255.0 marker.color.b = color[2] / 255.0 # marker.lifetime = rospy.Duration(10) # Display time. If not set, it will be kept by default(显示时间,没有设置默认一直保留) # Position posture(位置姿态) marker.pose.position.x = pose.pose.position.x marker.pose.position.y = pose.pose.position.y marker.pose.orientation = pose.pose.orientation markerArray.markers.append(marker) self.mark_pub.publish(markerArray) self.nav_pub.publish(pose) response.success = True response.message = "navigation pick" return response |
Upon invocation, sets navigation points in RVIZ to begin picking up items based on their location.
start_place_srv_callback:
129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 | def start_place_srv_callback(self, request, response): self.get_logger().info('start navigaiton place') markerArray = MarkerArray() pose = PoseStamped() pose.header.frame_id = self.map_frame pose.header.stamp = self.navigator.get_clock().now().to_msg() data = request.data q = common.rpy2qua(math.radians(data.roll), math.radians(data.pitch), math.radians(data.yaw)) pose.pose.position.x = data.x pose.pose.position.y = data.y pose.pose.orientation = q # Mark the point with number to display(用数字标记来显示点) marker = Marker() marker.header.frame_id = self.map_frame marker.type = marker.MESH_RESOURCE marker.mesh_resource = "package://example/resource/flag.dae" marker.action = marker.ADD # Size(大小) marker.scale.x = 0.08 marker.scale.y = 0.08 marker.scale.z = 0.2 # Color(颜色) color = list(np.random.choice(range(256), size=3)) marker.color.a = 1.0 marker.color.r = color[0] / 255.0 marker.color.g = color[1] / 255.0 marker.color.b = color[2] / 255.0 # marker.lifetime = rospy.Duration(10) # Display time. If not set, it will be kept by default(显示时间,没有设置默认一直保留) # Position posture(位置姿态) marker.pose.position.x = pose.pose.position.x marker.pose.position.y = pose.pose.position.y marker.pose.orientation = pose.pose.orientation markerArray.markers.append(marker) self.mark_pub.publish(markerArray) self.nav_pub.publish(pose) response.success = True response.message = "navigation place" return response |
Upon invocation, sets navigation points in RVIZ to begin placing items based on their location.
goal_callback:
173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 | def goal_callback(self, msg): # Obtain the navigation point to be published(获取要发布的导航点) self.get_logger().info('\033[1;32m%s\033[0m' % str(msg)) get_parameters_request = GetParameters.Request() get_parameters_request.names = ['status'] status = self.send_request(self.get_param_client, get_parameters_request).values[0].string_value self.get_logger().info('\033[1;32m%s\033[0m' % status) if status == 'start' or status == 'place_finish': # It's in the state of picking(处于可以pick的状态) self.pick = True self.place = False self.get_logger().info('\033[1;32m%s\033[0m' % 'nav pick') self.navigator.goToPose(msg) self.haved_publish_goal = True elif status == 'pick_finish': # It's in the state of placing(处于可以place的状态) self.pick = False self.place = True self.get_logger().info('\033[1;32m%s\033[0m' % 'nav place') self.navigator.goToPose(msg) self.haved_publish_goal = True if self.haved_publish_goal: i = 0 while not self.navigator.isTaskComplete(): i = i + 1 feedback = self.navigator.getFeedback() if feedback and i % 5 == 0: self.get_logger().info( 'Estimated time of arrival: ' + '{0:.0f}'.format( Duration.from_msg(feedback.estimated_time_remaining).nanoseconds / 1e9 ) + ' seconds.' ) # Some navigation timeout to demo cancellation if Duration.from_msg(feedback.navigation_time) > Duration(seconds=600.0): self.navigator.cancelTask() # Some navigation request change to demo preemption if Duration.from_msg(feedback.navigation_time) > Duration(seconds=18.0): self.goal_pub.publish(self.goal_pose) self.get_logger().info('\033[1;32m%s\033[0m' % 'feedback') # Do something depending on the return code result = self.navigator.getResult() if result == TaskResult.SUCCEEDED: self.get_logger().info('Goal succeeded!') if self.pick: res = self.send_request(self.pick_client, Trigger.Request()) if res.success: self.get_logger().info('start pick') else: self.get_logger().info('start pick failed') else: res = self.send_request(self.place_client, Trigger.Request()) if res.success: self.get_logger().info('start place') else: self.get_logger().info('start place failed') self.haved_publish_goal = False elif result == TaskResult.CANCELED: self.get_logger().info('Goal was canceled!') elif result == TaskResult.FAILED: self.get_logger().info('Goal failed!') else: self.get_logger().info('Goal has an invalid return status!') |
Callback function for navigation points; switches between pick and place modes based on the current set navigation points.
Gripping Calibration
The default recognition and gripping area of the program is located in the center of the image. No adjustments are required for the normal circumstance. If the robotic arm fails to grip the colored blocks during the game, you can adjust the position of this area through the program command. The specific steps are as follow:
(1) Start JetRove and connect it to Nomachine remote control software.
(2) Click on  to open the command line terminal.
to open the command line terminal.
(3) Input the command to disable the app auto-start service:
sudo systemctl stop start_app_node.service
(4) Execute the following command to initiate gripping position calibration:
ros2 launch example automatic_pick.launch.py debug:=true
(5) Once the robotic arm reaches the grasping position, place the color block in the center of the gripper. Then, wait for the arm to return to its original position and perform another grasp to finish the calibration process. After calibration is complete, the terminal will show the pixel coordinates of the color block and display a confirmation message.

The data after automatic calibration will be saved in the /home/ros_ws/src/example/config/automatic_pick_rol.yaml file.
pick_stop_pixel_coordinate refers to the pixel coordinates of the gripping position in the image. The first parameter represents the x-axis coordinate. Decreasing this value shifts the horizontal position to the left, while increasing it shifts the gripping horizontal position to the right. The second parameter represents the y-axis coordinate. Decreasing this value moves the gripping position closer, while increasing it moves the gripping position farther away. Generally, you can rely on automatic calibration results, but you can also adjust it according to your personal preference.
place_stop_pixel_coordinate refers the pixel coordinates of the placement position in the image. The first parameter represents the x-axis coordinate. Increasing this value shifts the placement position to the left, while decreasing it shifts the placement position to the right. The second parameter represents the y-axis coordinate. Decreasing this value adjusts the placement position closer, while increasing it moves the gripping position farther away.
Note
Automatic calibration solely calibrates the coordinates of the gripping position. The coordinates of the placement position are not automatically calibrated. If a placement target is set and the placement effect is not satisfactory, manual adjustment is required.

(6) Upon the completion of the modification, please start the game according to “Operation Steps”.
7.3 3D Vision(Vision Application)
Note
The Ackermann steering configuration does not support features such as fall prevention, bridge crossing, or object tracking.
7.3.1 Edge Detection
Overview
When the robot moves, it may encounter various situations where the road has steps or the sunken ground. If there is no corresponding detection and handling measures, the robot takes the risk of falling. When the route is relatively flat and smooth, the ranging distance remains relatively consistent within two different areas, the distance change is relatively continuous. However, when there are steps or depressions ahead, there is a significant discontinuity in the ranging distance values. Therefore, during the autonomous navigation, it is of great importance to ensure the safety of the robot’s movement. To tackle this issue, it is possible to assess the safety of the robot’s forward direction by utilizing depth information obtained through depth camera.
Operation Steps
Note
The entered command should be case sensitive, and the “Tab” key can used to complemented the key words.
(1) Start JetRover and connect it to Nomachine remote control system.
(2) Double click on  to start the command line terminal.
to start the command line terminal.
(3) Input the command and press Enter to disable the app service.
sudo systemctl stop start_app_node.service
(4) Input the command to start the game.
ros2 launch example prevent_falling.launch.py debug:=true
(5) If you want to exit this game, press “Ctrl+C” in the terminal. Fail to do so requires multiple tries.
Outcome
After the game starts, JetRover will automatically move forward. When When the terrain ahead of the robot is relatively higher or lower, the robot will automatically turn in place. Then it will assess whether the position ahead is flat. If it is flat, the robot will continue to move forward; otherwise, it will continue to turn in place until the terrain ahead is relatively flat.
Note
When using the robot for the first time or when changing the its placement position, it is mandatory to run the command ros2 launch example prevent_falling.launch.py debug:=true to evaluate the current environment to obtain a safe state. Subsequently, when the robot operates, execute ros2 launch example prevent_falling.launch.py to achieve the same effect as the calibration performed at the previous position.
Program Analysis
(1) launch Analysis

The path to the source code of the program is as follow: ~/ros2_ws/src/example/example/rgbd_function/prevent_falling.launch.py
① Initiate Other Launch Files
22 23 24 25 26 27 28 29 | depth_camera_launch = IncludeLaunchDescription( PythonLaunchDescriptionSource( os.path.join(peripherals_package_path, 'launch/depth_camera.launch.py')), ) controller_launch = IncludeLaunchDescription( PythonLaunchDescriptionSource( os.path.join(controller_package_path, 'launch/controller.launch.py')), ) |
The depth_camera_launch is used to start the depth camera.
The controller_launch is used to start the chassis, servos, and other controls.
② Start Node
31 32 33 34 35 36 | prevent_falling_node = Node( package='example', executable='prevent_falling', output='screen', parameters=[os.path.join(example_package_path, 'config/plane_distance.yaml'), {'debug': debug}] ) |
The prevent_falling_node is used to start the anti-fall node.
(2) Python Program Analysis
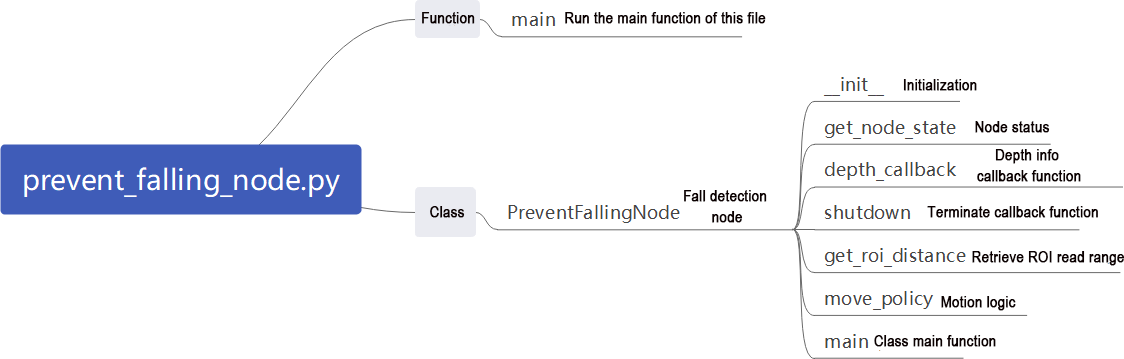
This section will analyze the code for the anti-fall feature. The source code is located at: ~/ros2_ws/src/example/example/rgbd_function/prevent_falling_node.py.
① Function: Main
148 149 150 151 | def main(): node = PreventFallingNode('prevent_falling') rclpy.spin(node) node.destroy_node() |
Start the anti-fall node.
② Class: PreventFallingNode
24 | class PreventFallingNode(Node): |
Init:
25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 | def __init__(self, name): rclpy.init() super().__init__(name, allow_undeclared_parameters=True, automatically_declare_parameters_from_overrides=True) signal.signal(signal.SIGINT, self.shutdown) self.running = True self.turn = False self.plane_high = self.get_parameter('plane_distance').value self.debug = self.get_parameter('debug').value self.time_stamp = time.time() self.image_queue = queue.Queue(maxsize=2) self.left_roi = [290, 300, 95, 105] self.center_roi = [290, 300, 315, 325] self.right_roi = [290, 300, 535, 545] self.joints_pub = self.create_publisher(ServosPosition, '/servo_controller', 1) # Servo control(舵机控制) self.mecanum_pub = self.create_publisher(Twist, '/controller/cmd_vel', 1) # Chassis control(底盘控制) self.create_subscription(Image, '/depth_cam/depth/image_raw', self.depth_callback, 1) self.client = self.create_client(SetBool, '/depth_cam/set_ldp_enable') self.client.wait_for_service() msg = SetBool.Request() msg.data = False future = self.client.call_async(msg) rclpy.spin_until_future_complete(self, future) self.client = self.create_client(Trigger, '/controller_manager/init_finish') self.client.wait_for_service() self.mecanum_pub.publish(Twist()) set_servo_position(self.joints_pub, 1, ((1, 500), (2, 700), (3, 85), (4, 150), (5, 500), (10, 200))) time.sleep(1) threading.Thread(target=self.main, daemon=True).start() self.create_service(Trigger, '~/init_finish', self.get_node_state) self.get_logger().info('\033[1;32m%s\033[0m' % 'start') |
Initialize parameters required for anti-fall, call servo control, chassis control, camera node, and initialize actions by calling the main function.
get_node_state:
59 60 61 | def get_node_state(self, request, response): response.success = True return responsee |
Initialize node state.
depth_callback:
63 64 65 66 67 68 69 | def depth_callback(self, ros_depth_image): depth_image = np.ndarray(shape=(ros_depth_image.height, ros_depth_image.width), dtype=np.uint16, buffer=ros_depth_image.data) if self.image_queue.full(): # If the queue is full, discard the oldest image(如果队列已满,丢弃最旧的图像) self.image_queue.get() # Put the image into the queue(将图像放入队列) self.image_queue.put(depth_image) |
Used to read depth information and store it in a queue.
shutdown:
71 72 | def shutdown(self, signum, frame): self.running = False |
Callback function to shut down the program, setting the ‘running’ parameter to false.
get_roi_distance:
74 75 76 77 78 79 80 | def get_roi_distance(self, depth_image, roi): roi_image = depth_image[roi[0]:roi[1], roi[2]:roi[3]] try: distance = round(float(np.mean(roi_image[np.logical_and(roi_image>0, roi_image<30000)])/1000), 3) except: distance = 0 return distance |
Get depth information of the cropped image after ROI.
move_policy:
82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 | def move_policy(self, left_distance, center_distance, right_distance): if abs(left_distance - self.plane_high) > 0.02 or abs(center_distance - self.plane_high) > 0.02 or abs(right_distance - self.plane_high) > 0.02: twist = Twist() twist.angular.z = 0.8 self.turn = True self.time_stamp = time.time() + 0.3 self.mecanum_pub.publish(twist) else: if self.turn: self.current_time_stamp = time.time() if self.time_stamp < self.current_time_stamp: self.turn = False self.mecanum_pub.publish(Twist()) self.time_stamp = time.time() + 0.2 else: self.current_time_stamp = time.time() if self.time_stamp < self.current_time_stamp: twist = Twist() twist.linear.x = 0.2 self.mecanum_pub.publish(twist) |
Movement strategy function that prevents the robot from falling based on recognized depth information.
main:
103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 | def main(self): count = 0 while self.running: try: depth_image = self.image_queue.get(block=True, timeout=1) except queue.Empty: if not self.running: break else: continue depth_color_map = cv2.applyColorMap(cv2.convertScaleAbs(depth_image, alpha=0.45), cv2.COLORMAP_JET) cv2.circle(depth_color_map, (int((self.left_roi[2] + self.left_roi[3]) / 2), int((self.left_roi[0] + self.left_roi[1]) / 2)), 10, (0, 0, 0), -1) cv2.circle(depth_color_map, (int((self.center_roi[2] + self.center_roi[3]) / 2), int((self.center_roi[0] + self.center_roi[1]) / 2)), 10, (0, 0, 0), -1) cv2.circle(depth_color_map, (int((self.right_roi[2] + self.right_roi[3]) / 2), int((self.right_roi[0] + self.right_roi[1]) / 2)), 10, (0, 0, 0), -1) left_distance = self.get_roi_distance(depth_image, self.left_roi) center_distance = self.get_roi_distance(depth_image, self.center_roi) right_distance = self.get_roi_distance(depth_image, self.right_roi) self.get_logger().info(str([left_distance, center_distance, right_distance])) if self.debug: count += 1 if count > 50 and not math.isnan(left_distance) and not math.isnan(center_distance) and not math.isnan(right_distance): count = 0 self.plane_high = (left_distance + center_distance + right_distance)/3 data = {'/**': {'ros__parameters': {'plane_distance': {}}}} data['/**']['ros__parameters']['plane_distance'] = self.plane_high common.save_yaml_data(data, os.path.join( os.path.abspath(os.path.join(os.path.split(os.path.realpath(__file__))[0], '../..')), 'config/plane_distance.yaml')) self.debug = False else: if math.isnan(left_distance): left_distance = 0 if math.isnan(center_distance): center_distance = 0 if math.isnan(right_distance): right_distance = 0 self.move_policy(left_distance, center_distance, right_distance) cv2.imshow('depth_color_map', depth_color_map) k = cv2.waitKey(1) & 0xFF if k == 27 or k == ord('q'): self.running = False self.mecanum_pub.publish(Twist()) self.get_logger().info('\033[1;32m%s\033[0m' % 'shutdown') rclpy.shutdown() |
Main function of the anti-fall class. First, it reads depth information, crops the image based on ROI, extracts recognition information from the cropped image, applies a movement strategy based on the recognized information, and displays the image.
7.3.2 Cross the Single-plank Bridge
Overview
The crossing of the single-plank bridge by a robot involves various aspects of technology such as balance control and environmental perception.
In order to maintain balance, the robot needs to process precise posture control capabilities, encompassing precise control of the center of gravity and limb joints angles. It is necessary to leverage robot’s dynamic model and control algorithms such as PID control and fuzzy logic. Additionally, environmental perception also plays an important role in this task because the robot needs to be able to perceive the real-time information about surrounding environment, including the width, height and slope of the single-plank bridge for posture adjustment. All in all, the realization of this functionality requires substantial experimentation and meticulous calibration.
Operation Steps
Note
The entered command should be case sensitive, and the “Tab” key can used to complemented the key words.
(1) Start JetRover and connect it to Nomachine remote control system.
(2) Double click on to start the command line terminal.
(3) Input the command and press Enter to disable the app auto-start service.
sudo systemctl stop start_app_node.service
(4) Execute the command to start the game.
ros2 launch example cross_bridge.launch.py debug:=true
Note
The Ackermann chassis version doesn’t support this function.
(5) If you want to exit this game, press “Ctrl+C” in the terminal. Fail to do so requires multiple tries.
Outcome
After placing the props and initiating the program, JetRover will automatically adjust its altitude, enabling itself to perform smooth traversal along the single-plank bridge without falling off.
Note
When executing this function for the first time (or whenever the robot’s position changes), it is imperative to run the command ros2 launch example cross_bridge.launch.py debug:=true to make a calibration for the current sate of single-plank bridge, obtaining a standard detection status. Then run the command ros2 launch example cross_bridge.launch.py to perform the same effect as the previous calibration at the specified position.
Program Analysis
(1) Program Analysis

Program path: ~/ros2_ws/src/example/example/rgbd_function/cross_bridge.launch.py
① Initiate other Launch files
22 23 24 25 26 27 28 29 | depth_camera_launch = IncludeLaunchDescription( PythonLaunchDescriptionSource( os.path.join(peripherals_package_path, 'launch/depth_camera.launch.py')), ) controller_launch = IncludeLaunchDescription( PythonLaunchDescriptionSource( os.path.join(controller_package_path, 'launch/controller.launch.py')), ) |
depth_camera_launch is used to initiate the camera.
controller_launch is used to initiate control of the chassis, servos, and other components.
② Start Node
31 32 33 34 35 36 | cross_bridge_node = Node( package='example', executable='cross_bridge', output='screen', parameters=[os.path.join(example_package_path, 'config/bridge_plane_distance.yaml'), {'debug': debug}] ) |
(2) Python Program Analysis
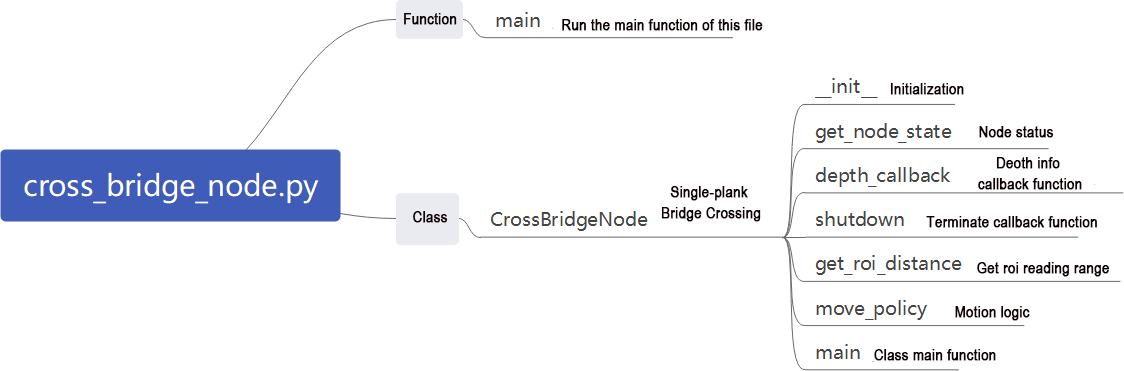
This document analyzes the programming of anti-fall game. The program source code is located at: ~/ros2_ws/src/example/example/rgbd_function/cross_bridge_node.py
① Functions: Main
161 162 163 164 | def main(): node = CrossBridgeNode('cross_bridge') rclpy.spin(node) node.destroy_node() |
Launches the anti-fall node.
② Class: CrossBridgeNode
Init:
25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 | def __init__(self, name): rclpy.init() super().__init__(name, allow_undeclared_parameters=True, automatically_declare_parameters_from_overrides=True) self.name = name signal.signal(signal.SIGINT, self.shutdown) self.running = True self.turn = False self.plane_high = self.get_parameter('plane_distance').value self.debug = self.get_parameter('debug').value self.twist = Twist() self.image_queue = queue.Queue(maxsize=2) self.left_roi = [290, 300, 165, 175] self.center_roi = [290, 300, 315, 325] self.right_roi = [290, 300, 465, 475] self.debug = self.get_parameter('debug').value self.joints_pub = self.create_publisher(ServosPosition, '/servo_controller', 1) # Servo control(舵机控制) self.mecanum_pub = self.create_publisher(Twist, '/controller/cmd_vel', 1) # Chassis control(底盘控制) self.create_subscription(Image, '/depth_cam/depth/image_raw', self.depth_callback, 1) self.client = self.create_client(SetBool, '/depth_cam/set_ldp_enable') self.client.wait_for_service() msg = SetBool.Request() msg.data = False future = self.client.call_async(msg) rclpy.spin_until_future_complete(self, future) self.client = self.create_client(Trigger, '/controller_manager/init_finish') self.client.wait_for_service() self.mecanum_pub.publish(Twist()) set_servo_position(self.joints_pub, 1, ((1, 500), (2, 700), (3, 85), (4, 150), (5, 500), (10, 200))) time.sleep(1) threading.Thread(target=self.main, daemon=True).start() self.create_service(Trigger, '~/init_finish', self.get_node_state) self.get_logger().info('\033[1;32m%s\033[0m' % 'start') |
Initializes parameters required for crossing the log bridge, calls servo control, chassis control, camera node, and initializes actions by calling the main function.
get_node_state:
60 61 62 | def get_node_state(self, request, response): response.success = True return response |
Initializes node state
depth_callback:
64 65 66 67 68 69 70 71 | def depth_callback(self, ros_depth_image): depth_image = np.ndarray(shape=(ros_depth_image.height, ros_depth_image.width), dtype=np.uint16, buffer=ros_depth_image.data) if self.image_queue.full(): # If the queue is full, discard the oldest image(如果队列已满,丢弃最旧的图像) self.image_queue.get() # Put the image into the queue(将图像放入队列) self.image_queue.put(depth_image) |
Reads depth information and stores it in a queue.
shutdown:
73 74 75 | def shutdown(self, signum, frame): self.running = False self.get_logger().info('\033[1;32m%s\033[0m' % "shutdown") |
Callback function to shut down the program; sets the parameter ‘running’ to false to close the program.
get_roi_distance:
77 78 79 80 81 82 83 | def get_roi_distance(self, depth_image, roi): roi_image = depth_image[roi[0]:roi[1], roi[2]:roi[3]] try: distance = round(float(np.mean(roi_image[np.logical_and(roi_image > 0, roi_image < 30000)]) / 1000), 3) except: distance = 0 return distance |
Retrieves depth information of the image after ROI cropping.
move_policy:
85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 | def move_policy(self, left_distance, center_distance, right_distance): if abs(left_distance - self.plane_high) > 0.02: if abs(center_distance - self.plane_high) > 0.02: self.twist.angular.z = -1.0 else: self.twist.angular.z = -0.2 elif abs(right_distance - self.plane_high) > 0.02: if abs(center_distance - self.plane_high) > 0.02: self.twist.angular.z = 1.0 else: self.twist.angular.z = 0.2 else: self.twist.angular.z = 0.0 if abs(left_distance - self.plane_high) > 0.02 and abs(right_distance - self.plane_high) > 0.02 and abs(center_distance - self.plane_high) > 0.02: self.twist = Twist() #self.running = False else: self.twist.linear.x = 0.2 self.mecanum_pub.publish(self.twist) |
Movement strategy function; adjusts robot direction based on recognized depth information to prevent falls and ensure stable crossing on the log bridge.
Main:
106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 | def main(self): count = 0 while self.running: try: depth_image = self.image_queue.get(block=True, timeout=1) except queue.Empty: if not self.running: break else: continue depth_color_map = cv2.applyColorMap(cv2.convertScaleAbs(depth_image, alpha=0.45), cv2.COLORMAP_JET) if self.debug: cv2.circle(depth_color_map, (int((self.left_roi[2] + self.left_roi[3]) / 2), int((self.left_roi[0] + self.left_roi[1]) / 2)), 10, (0, 0, 0), -1) cv2.circle(depth_color_map, (int((self.center_roi[2] + self.center_roi[3]) / 2), int((self.center_roi[0] + self.center_roi[1]) / 2)), 10, (0, 0, 0), -1) cv2.circle(depth_color_map, (int((self.right_roi[2] + self.right_roi[3]) / 2), int((self.right_roi[0] + self.right_roi[1]) / 2)), 10, (0, 0, 0), -1) left_distance = self.get_roi_distance(depth_image, self.left_roi) center_distance = self.get_roi_distance(depth_image, self.center_roi) right_distance = self.get_roi_distance(depth_image, self.right_roi) count += 1 self.get_logger().info(str([left_distance, center_distance, right_distance])) if count > 50 and not math.isnan(center_distance): count = 0 self.plane_high = center_distance data = {'/**': {'ros__parameters': {'plane_distance': {}}}} data['/**']['ros__parameters']['plane_distance'] = self.plane_high common.save_yaml_data(data, os.path.join( os.path.abspath(os.path.join(os.path.split(os.path.realpath(__file__))[0], '../..')), 'config/bridge_plane_distance.yaml')) self.debug = False else: left_roi = [self.left_roi[0], self.left_roi[1], self.left_roi[2] - 80, self.left_roi[3] - 80] right_roi = [self.right_roi[0], self.right_roi[1], self.right_roi[2] + 80, self.right_roi[3] + 80] cv2.circle(depth_color_map, (int((left_roi[2] + left_roi[3]) / 2), int((left_roi[0] + left_roi[1]) / 2)), 10, (0, 0, 0), -1) cv2.circle(depth_color_map, (int((self.center_roi[2] + self.center_roi[3]) / 2), int((self.center_roi[0] + self.center_roi[1]) / 2)), 10, (0, 0, 0), -1) cv2.circle(depth_color_map, (int((right_roi[2] + right_roi[3]) / 2), int((right_roi[0] + right_roi[1]) / 2)), 10, (0, 0, 0), -1) left_distance = self.get_roi_distance(depth_image, left_roi) center_distance = self.get_roi_distance(depth_image, self.center_roi) right_distance = self.get_roi_distance(depth_image, right_roi) self.get_logger().info(str([left_distance, center_distance, right_distance])) if math.isnan(left_distance): left_distance = 0 if math.isnan(center_distance): center_distance = 0 if math.isnan(right_distance): right_distance = 0 self.move_policy(left_distance, center_distance, right_distance) cv2.imshow('depth_color_map', depth_color_map) k = cv2.waitKey(1) & 0xFF if k == 27 or k == ord('q'): self.running = False self.mecanum_pub.publish(Twist()) self.get_logger().info('\033[1;32m%s\033[0m' % 'shutdown') rclpy.shutdown() |
Main function of the cross bridge class. First reads depth information, performs image cropping using ROI to obtain recognition information within the cropped image, applies movement strategy based on the recognized information, and displays the image.
7.3.3 Object Tracking
Overview
Object Tracking involves implementing vision-based object tracking and robot motion control. It combines functionalities such as image processing, point cloud processing, PID control, robot motion control, visualization, and interaction. It can be used to guide the robot to automatically track and approach specific objects.
Operation Steps
Note
The entered command should be case sensitive, and the “Tab” key can used to complemented the key words.
(1) Start JetRover and connect it to Nomachine remote control system.
(2) Double click on to start the command line terminal.
(3) Input the command and press Enter to disable the app service.
sudo systemctl stop start_app_node.service
(4) Input the command to start the game.
ros2 launch example track_object.launch.py
Note
The Ackermann chassis doesn’t support this function.
(5) If you want to exit this game, press “Ctrl+C” in the terminal. Fail to do so requires multiple tries.
Outcome
After initiating the game, the camera will track the object and control the robot to move accordingly.
Program Analysis
(1) launch Analysis

Program path: ~/ros2_ws/src/example/example/rgbd_function/track_object.launch.py
① Initiate Other Launch Files
20 21 22 23 24 25 26 27 | depth_camera_launch = IncludeLaunchDescription( PythonLaunchDescriptionSource( os.path.join(peripherals_package_path, 'launch/depth_camera.launch.py')), ) controller_launch = IncludeLaunchDescription( PythonLaunchDescriptionSource( os.path.join(controller_package_path, 'launch/controller.launch.py')), ) |
depth_camera_launch is used to start the camera.
controller_launch is used to start chassis, servo, and other controls.
② Start the Node
38 39 40 41 42 | track_object_node = Node( package='example', executable='track_object', output='screen', ) |
track_object_node is used to launch the object tracking node.
(2) Python Program Analysis
This section analyzes the programming of anti-fall game. The program source code is located at: ~/ros2_ws/src/example/example/rgbd_function/track_object_node.py

① Function: Main
261 262 263 264 265 266 | def main(): node = TrackObjectNode('track_object') executor = MultiThreadedExecutor() executor.add_node(node) executor.spin() node.destroy_node() |
Initiate object tracking node.
② Class: CrossBridgeNode
Init:
27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 | def __init__(self, name): rclpy.init() super().__init__(name, allow_undeclared_parameters=True, automatically_declare_parameters_from_overrides=True) signal.signal(signal.SIGINT, self.shutdown) self.machine_type = os.environ.get('MACHINE_TYPE') self.pid_x = pid.PID(1.5, 0, 0) self.pid_y = pid.PID(1.5, 0, 0) self.pid_z = pid.PID(3, 0, 0) self.x_speed, self.y_speed, self.z_speed = 0.007, 0.007, 0.04 self.stop_distance = 0.4 self.x_stop = -0.1 self.scale = 4 self.proc_size = [int(640/self.scale), int(480/self.scale)] self.linear_x, self.linear_y, self.angular = 0, 0, 0 self.haved_add = False self.get_point = False self.display = 1 self.running = True self.pc_queue = queue.Queue(maxsize=1) self.target_cloud = o3d.geometry.PointCloud() # The point cloud to be displayed(要显示的点云) # Crop roi(裁剪roi) # x, y, z roi = np.array([ [-0.7, -0.5, 0], [-0.7, 0.3, 0], [0.7, 0.3, 0], [0.7, -0.5, 0]], dtype = np.float64) # Positive for y direction is forward, and negative for x direction is left(y 近+, x左-) self.vol = o3d.visualization.SelectionPolygonVolume() # Crop z-axis, range(裁剪z轴,范围) self.vol.orthogonal_axis = 'Z' self.vol.axis_max = 0.9 self.vol.axis_min = -0.3 self.vol.bounding_polygon = o3d.utility.Vector3dVector(roi) self.t0 = time.time() self.joints_pub = self.create_publisher(ServosPosition, '/servo_controller', 1) # Servo control(舵机控制) self.mecanum_pub = self.create_publisher(Twist, '/controller/cmd_vel', 1) # Chassis control(底盘控制) timer_cb_group = ReentrantCallbackGroup() self.client = self.create_client(Trigger, '/controller_manager/init_finish') self.client.wait_for_service() self.client = self.create_client(SetBool, '/depth_cam/set_ldp_enable') self.client.wait_for_service() camera_name = 'depth_cam' rgb_sub = message_filters.Subscriber(self, Image, '/%s/rgb/image_raw' % camera_name) depth_sub = message_filters.Subscriber(self, Image, '/%s/depth/image_raw' % camera_name) info_sub = message_filters.Subscriber(self, CameraInfo, '/%s/depth/camera_info' % camera_name) # Synchronize timestamps, allowing a time deviation of up to 0.02 seconds(同步时间戳, 时间允许有误差在0.02s) sync = message_filters.ApproximateTimeSynchronizer([rgb_sub, depth_sub, info_sub], 3, 0.02) sync.registerCallback(self.multi_callback) #Execute feedback function(执行反馈函数) |
Initializes parameters required for object tracking, calls servo control, chassis control, and camera node. This includes using RGB and depth information from the camera, synchronizing the timestamps of both data to ensure real-time recognition.
init_process:
87 88 89 90 91 92 93 94 95 96 97 98 99 | def init_process(self): self.timer.cancel() self.mecanum_pub.publish(Twist()) set_servo_position(self.joints_pub, 1, ((1, 500), (2, 765), (3, 85), (4, 150), (5, 500), (10, 200))) msg = SetBool.Request() msg.data = False self.send_request(self.client, msg) threading.Thread(target=self.main, daemon=True).start() self.create_service(Trigger, '~/init_finish', self.get_node_state) self.get_logger().info('\033[1;32m%s\033[0m' % 'start') |
Initializes the robotic arm posture and starts the main function.
get_node_state:
101 102 103 | def get_node_state(self, request, response): response.success = True return response |
Initializes node state.
send_request:
105 106 107 108 109 | def send_request(self, client, msg): future = client.call_async(msg) while rclpy.ok(): if future.done() and future.result(): return future.result() |
Publishes service requests.
multi_callback:
111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 | def multi_callback(self, ros_rgb_image, ros_depth_image, depth_camera_info): try: # Convert ROS format to NumPy (ROS格式转为NumPy) rgb_image = np.ndarray(shape=(ros_rgb_image.height, ros_rgb_image.width, 3), dtype=np.uint8, buffer=ros_rgb_image.data) depth_image = np.ndarray(shape=(ros_depth_image.height, ros_depth_image.width), dtype=np.uint16, buffer=ros_depth_image.data) rgb_image = cv2.resize(rgb_image, tuple(self.proc_size), interpolation=cv2.INTER_NEAREST) depth_image = cv2.resize(depth_image, tuple(self.proc_size), interpolation=cv2.INTER_NEAREST) # self.get_logger().info('\033[1;32m%s\033[0m' % str(depth_camera_info)) intrinsic = o3d.camera.PinholeCameraIntrinsic(int(depth_camera_info.width / self.scale), int(depth_camera_info.height / self.scale), int(depth_camera_info.k[0] / self.scale), int(depth_camera_info.k[4] / self.scale), int(depth_camera_info.k[2] / self.scale), int(depth_camera_info.k[5] / self.scale)) o3d_image_rgb = o3d.geometry.Image(rgb_image) o3d_image_depth = o3d.geometry.Image(np.ascontiguousarray(depth_image)) # rgbd_function --> point_cloud rgbd_image = o3d.geometry.RGBDImage.create_from_color_and_depth(o3d_image_rgb, o3d_image_depth, convert_rgb_to_intensity=False) # The cpu usage is high(cpu占用大) pc = o3d.geometry.PointCloud.create_from_rgbd_image(rgbd_image, intrinsic)#, extrinsic=extrinsic)ic) # Crop(裁剪) roi_pc = self.vol.crop_point_cloud(pc) if len(roi_pc.points) > 0: # Remove the largest plane, namely the ground, with a distance threshold of 4mm, neighboring point count, and iteration count(去除最大平面,即地面, 距离阈4mm,邻点数,迭代次数) plane_model, inliers = roi_pc.segment_plane(distance_threshold=0.05, ransac_n=10, num_iterations=50) # Keep the inner points(保留内点) inlier_cloud = roi_pc.select_by_index(inliers, invert=True) self.target_cloud.points = inlier_cloud.points self.target_cloud.colors = inlier_cloud.colors else: self.target_cloud.points = roi_pc.points self.target_cloud.colors = roi_pc.colors # Rotate 180 degrees for easier viewing(转180度方便查看) self.target_cloud.transform(np.asarray([[1, 0, 0, 0], [0, -1, 0, 0], [0, 0, -1, 0], [0, 0, 0, 1]])) try: self.pc_queue.put_nowait(self.target_cloud) except queue.Full: pass # fps = int(1.0/(time.time() - self.t0)) # print('\r', 'FPS: ' + str(fps), end='') except BaseException as e: print('callback error:', e) self.t0 = time.time() |
Reads depth and RGB images, constructs RGBD data, generates a point cloud image, and filters out the ground to retain objects for recognition.
shutdown:
161 162 | def shutdown(self, signum, frame): self.running = False |
Callback function to shut down the program; sets the ‘running’ parameter to false to close the program.
main:
164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 | def main(self): if self.display: # Create a visualization window(创建可视化窗口) vis = o3d.visualization.Visualizer() vis.create_window(window_name='point cloud', width=640, height=360, visible=1) while self.running: if not self.haved_add: if self.display: try: point_cloud = self.pc_queue.get(block=True, timeout=2) except queue.Empty: continue vis.add_geometry(point_cloud) self.haved_add = True if self.haved_add: try: point_cloud = self.pc_queue.get(block=True, timeout=2) except queue.Empty: continue # Refresh(刷新) points = np.asarray(point_cloud.points) if len(points) > 0: twist = Twist() min_index = np.argmax(points[:, 2]) min_point = points[min_index] if len(point_cloud.colors) < min_index: continue point_cloud.colors[min_index] = [255, 255, 0] # kdtree = o3d.geometry.KDTreeFlann(point_cloud) # Search for the 10 nearest neighboring points of the specified coordinate point(搜索指定坐标点的 10 个最近邻点) # nearest_points = kdtree.search_knn_vector_3d(min_point, 8) # Color the 10 points(对 10 个点进行着色) # for i in nearest_points[1]: # point_cloud.colors[i] = [255, 255, 0] distance = min_point[-1] self.pid_x.SetPoint = self.stop_distance if abs(distance - self.stop_distance) < 0.1: distance = self.stop_distance self.pid_x.update(-distance) #Update pid(更新pid) tmp = self.x_speed - self.pid_x.output self.linear_x = tmp if tmp > 0.3: self.linear_x = 0.3 if tmp < -0.3: self.linear_x = -0.3 if abs(tmp) < 0.008: self.linear_x = 0.0 twist.linear.x = float(self.linear_x) if self.machine_type == 'JetRover_Mecanum': y_distance = min_point[0] self.pid_y.SetPoint = self.x_stop if abs(y_distance - self.x_stop) < 0.03: y_distance = self.x_stop self.pid_y.update(y_distance) #Update pid(更新pid) tmp = self.y_speed + self.pid_y.output self.linear_y = tmp if tmp > 0.3: self.linear_y = 0.3 if tmp < -0.3: self.linear_y = -0.3 if abs(tmp) < 0.008: self.linear_y = 0.0 twist.linear.y = float(self.linear_y) else: y_distance = min_point[0] self.pid_y.SetPoint = self.x_stop if abs(y_distance - self.x_stop) < 0.05: y_distance = self.x_stop self.pid_z.update(y_distance) #Update pid(更新pid) tmp = self.z_speed + self.pid_z.output self.angular = tmp if tmp > 1: self.angular = 1.0 if tmp < -1: self.angular = -1.0 if abs(tmp) < 0.05: self.angular = 0.0 twist.angular.z = float(self.angular) # print(y_distance, self.x_stop, self.angular) # print(min_point) if self.display: vis.update_geometry(point_cloud) vis.poll_events() vis.update_renderer() self.mecanum_pub.publish(twist) else: self.mecanum_pub.publish(Twist()) else: time.sleep(0.01) self.mecanum_pub.publish(Twist()) # Destroy all displayed geometric shapes(销毁所有显示的几何图形) vis.destroy_window() self.get_logger().info('\033[1;32m%s\033[0m' % 'shutdown') rclpy.shutdown() |
Main function of the object tracking class. It creates a visualization window and uses PID control to track objects with the robotic arm.
7.3.4 Tracking and Gripping
Overview
Combining depth vision and robot control techniques, this system identifies and tracks objects of specific colors, completing precise grasping actions. It utilizes a depth camera to capture images and depth information, employs color tracking algorithms to locate the target object, and uses a robotic arm for object operations. Features include using the OpenCV library to identify objects of specific colors in images, computing the exact position of objects in three-dimensional space using depth information, adjusting the movement of the robotic arm using PID controllers to precisely track and approach the target object. This system can be applied in automated production lines to achieve precise object picking and placing tasks, such as in service robots and automation.
Operation Steps
Note
The entered command should be case sensitive, and the “Tab” key can used to complemented the key words.
(1) Start JetRover and connect it to Nomachine remote control system.
(2) Double click on to open the command line terminal.
(3) Input the command and press Enter to disable the app service.
sudo systemctl stop start_app_node.service
(4) Execute the following command to initiate tracking and gripping program.
ros2 launch example track_and_grab.launch.py
(5) If you want to exit this game, press “Ctrl+C” in the terminal. Fail to do so requires multiple tries.
Outcome
After initiating the game, the robot will identify objects such as cylinders, cubes, spheres, etc., in the scene, then the robotic arm will track there items and perform gripping action once they are recognized.
Program Analysis
(1) launch Analysis
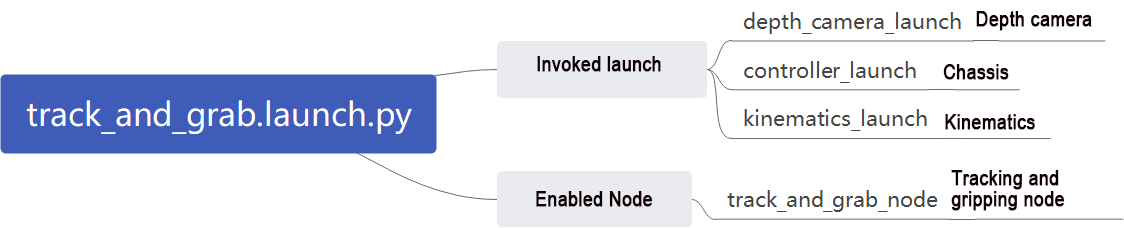
Program path: ~/ros2_ws/src/example/example/rgbd_function/track_and_grab.launch.py
① Initiate other Launch files
24 25 26 27 28 29 30 31 32 33 34 35 36 | depth_camera_launch = IncludeLaunchDescription( PythonLaunchDescriptionSource( os.path.join(peripherals_package_path, 'launch/depth_camera.launch.py')), ) controller_launch = IncludeLaunchDescription( PythonLaunchDescriptionSource( os.path.join(controller_package_path, 'launch/controller.launch.py')), ) kinematics_launch = IncludeLaunchDescription( PythonLaunchDescriptionSource( os.path.join(kinematics_package_path, 'launch/kinematics_node.launch.py')), ) |
depth_camera_launch is used to start the camera.
controller_launch is used to start the chassis, servos, and other controls.
kinematics_launch starts the kinematics node, which computes the servo angles required for three-dimensional coordinates.
② Start the Node
38 39 40 41 42 43 | track_and_grab_node = Node( package='example', executable='track_and_grab', output='screen', parameters=[{'color': color}, {'start': start}] ) |
track_and_grab_node is used to launch the tracking and grasping node.
(2) Python Program Analysis
This section will analyze the programming of the anti-fall gameplay. The source code is located at: ~/ros2_ws/src/example/example/rgbd_function/track_and_grab.py
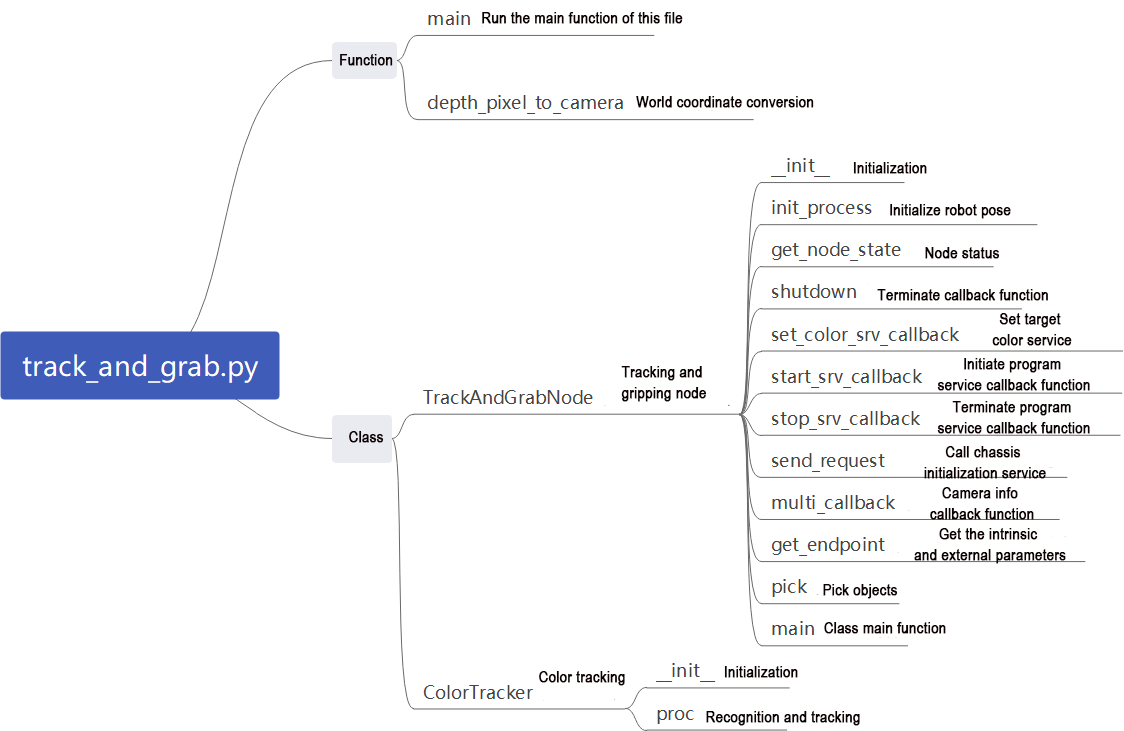
① Functions:
Main:
369 370 371 372 373 374 | def main(): node = TrackAndGrabNode('track_and_grab') executor = MultiThreadedExecutor() executor.add_node(node) executor.spin() node.destroy_node() |
Starts the tracking and grasping node.
depth_pixel_to_camera:
30 31 32 33 34 35 36 | def depth_pixel_to_camera(pixel_coords, depth, intrinsics): fx, fy, cx, cy = intrinsics px, py = pixel_coords x = (px - cx) * depth / fx y = (py - cy) * depth / fy z = depth return np.array([x, y, z]) |
Converts pixel coordinates to world coordinate system.
② Classes:
Init:
39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 | def __init__(self, target_color): self.target_color = target_color self.pid_yaw = pid.PID(20.5, 1.0, 1.2) self.pid_pitch = pid.PID(20.5, 1.0, 1.2) self.yaw = 500 self.pitch = 150 def proc(self, source_image, result_image, color_ranges): h, w = source_image.shape[:2] color = color_ranges['lab']['Stereo'][self.target_color] img = cv2.resize(source_image, (int(w/2), int(h/2))) img_blur = cv2.GaussianBlur(img, (3, 3), 3) # Gaussian blur(高斯模糊) img_lab = cv2.cvtColor(img_blur, cv2.COLOR_RGB2LAB) # Convert to the LAB space(转换到 LAB 空间) mask = cv2.inRange(img_lab, tuple(color['min']), tuple(color['max'])) # Binarization(二值化) # Smooth the edges, remove small patches, and merge adjacent patches(平滑边缘,去除小块,合并靠近的块) eroded = cv2.erode(mask, cv2.getStructuringElement(cv2.MORPH_RECT, (3, 3))) dilated = cv2.dilate(eroded, cv2.getStructuringElement(cv2.MORPH_RECT, (3, 3))) # Find out the contour with the maximal area(找出最大轮廓) contours = cv2.findContours(dilated, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)[-2] min_c = None for c in contours: if math.fabs(cv2.contourArea(c)) < 50: continue (center_x, center_y), radius = cv2.minEnclosingCircle(c) # The minimum circumcircle(最小外接圆) if min_c is None: min_c = (c, center_x) elif center_x < min_c[1]: if center_x < min_c[1]: min_c = (c, center_x) # If there are contours that meet the requirements(如果有符合要求的轮廓) if min_c is not None: (center_x, center_y), radius = cv2.minEnclosingCircle(min_c[0]) # The minimum circumcircle(最小外接圆) # Encircle the recognized color block to be tracked(圈出识别的的要追踪的色块) circle_color = common.range_rgb[self.target_color] if self.target_color in common.range_rgb else (0x55, 0x55, 0x55) cv2.circle(result_image, (int(center_x * 2), int(center_y * 2)), int(radius * 2), circle_color, 2) center_x = center_x * 2 center_x_1 = center_x / w if abs(center_x_1 - 0.5) > 0.02: # Stop moving if the difference range is less than a certain value(相差范围小于一定值就不用再动了) self.pid_yaw.SetPoint = 0.5 # Our goal is to position the color block at the center of the frame, which is at the halfway point of the entire pixel width of the frame(我们的目标是要让色块在画面的中心, 就是整个画面的像素宽度的 1/2 位置) self.pid_yaw.update(center_x_1) self.yaw = min(max(self.yaw + self.pid_yaw.output, 0), 1000) else: self.pid_yaw.clear() # If it has already reached the center, reset the PID controller(如果已经到达中心了就复位一下 pid 控制器) center_y = center_y * 2 center_y_1 = center_y / h if abs(center_y_1 - 0.5) > 0.02: self.pid_pitch.SetPoint = 0.5 self.pid_pitch.update(center_y_1) self.pitch = min(max(self.pitch + self.pid_pitch.output, 100), 720) else: self.pid_pitch.clear() return (result_image, (self.pitch, self.yaw), (center_x, center_y), radius * 2) else: return (result_image, None, None, 0) |
Initialize the parameters required for tracking and grasping.
Proc:
46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 | def proc(self, source_image, result_image, color_ranges): h, w = source_image.shape[:2] color = color_ranges['lab']['Stereo'][self.target_color] img = cv2.resize(source_image, (int(w/2), int(h/2))) img_blur = cv2.GaussianBlur(img, (3, 3), 3) # Gaussian blur(高斯模糊) img_lab = cv2.cvtColor(img_blur, cv2.COLOR_RGB2LAB) # Convert to the LAB space(转换到 LAB 空间) mask = cv2.inRange(img_lab, tuple(color['min']), tuple(color['max'])) # Binarization(二值化) # Smooth the edges, remove small patches, and merge adjacent patches(平滑边缘,去除小块,合并靠近的块) eroded = cv2.erode(mask, cv2.getStructuringElement(cv2.MORPH_RECT, (3, 3))) dilated = cv2.dilate(eroded, cv2.getStructuringElement(cv2.MORPH_RECT, (3, 3))) # Find out the contour with the maximal area(找出最大轮廓) contours = cv2.findContours(dilated, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)[-2] min_c = None for c in contours: if math.fabs(cv2.contourArea(c)) < 50: continue (center_x, center_y), radius = cv2.minEnclosingCircle(c) # The minimum circumcircle(最小外接圆) if min_c is None: min_c = (c, center_x) elif center_x < min_c[1]: if center_x < min_c[1]: min_c = (c, center_x) # If there are contours that meet the requirements(如果有符合要求的轮廓) if min_c is not None: (center_x, center_y), radius = cv2.minEnclosingCircle(min_c[0]) # The minimum circumcircle(最小外接圆) # Encircle the recognized color block to be tracked(圈出识别的的要追踪的色块) circle_color = common.range_rgb[self.target_color] if self.target_color in common.range_rgb else (0x55, 0x55, 0x55) cv2.circle(result_image, (int(center_x * 2), int(center_y * 2)), int(radius * 2), circle_color, 2) center_x = center_x * 2 center_x_1 = center_x / w if abs(center_x_1 - 0.5) > 0.02: # Stop moving if the difference range is less than a certain value(相差范围小于一定值就不用再动了) self.pid_yaw.SetPoint = 0.5 # Our goal is to position the color block at the center of the frame, which is at the halfway point of the entire pixel width of the frame(我们的目标是要让色块在画面的中心, 就是整个画面的像素宽度的 1/2 位置) self.pid_yaw.update(center_x_1) self.yaw = min(max(self.yaw + self.pid_yaw.output, 0), 1000) else: self.pid_yaw.clear() # If it has already reached the center, reset the PID controller(如果已经到达中心了就复位一下 pid 控制器) center_y = center_y * 2 center_y_1 = center_y / h if abs(center_y_1 - 0.5) > 0.02: self.pid_pitch.SetPoint = 0.5 self.pid_pitch.update(center_y_1) self.pitch = min(max(self.pitch + self.pid_pitch.output, 100), 720) else: self.pid_pitch.clear() return (result_image, (self.pitch, self.yaw), (center_x, center_y), radius * 2) else: return (result_image, None, None, 0) |
Recognize colors based on the specified tracking color, and process the recognized images.
TrackAndGrabNode:
101 102 103 104 105 106 107 | class TrackAndGrabNode(Node): hand2cam_tf_matrix = [ [0.0, 0.0, 1.0, -0.101], [-1.0, 0.0, 0.0, 0.011], [0.0, -1.0, 0.0, 0.045], [0.0, 0.0, 0.0, 1.0] ] |
Init:
109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 | def __init__(self, name): rclpy.init() super().__init__(name, allow_undeclared_parameters=True, automatically_declare_parameters_from_overrides=True) self.fps = fps.FPS() self.moving = False self.count = 0 self.start = False self.running = True self.last_pitch_yaw = (0, 0) self.enable_disp = 1 signal.signal(signal.SIGINT, self.shutdown) self.lab_data = common.get_yaml_data("/home/ubuntu/software/lab_tool/lab_config.yaml") self.last_position = (0, 0, 0) self.stamp = time.time() self.joints_pub = self.create_publisher(ServosPosition, '/servo_controller', 1) self.target_color = None self.get_current_pose_client = self.create_client(GetRobotPose, '/kinematics/get_current_pose') self.get_current_pose_client.wait_for_service() self.set_pose_target_client = self.create_client(SetRobotPose, '/kinematics/set_pose_target') self.set_pose_target_client.wait_for_service() self.create_service(Trigger, '~/start', self.start_srv_callback) self.create_service(Trigger, '~/stop', self.stop_srv_callback) self.create_service(SetString, '~/set_color', self.set_color_srv_callback) self.tracker = None self.image_queue = queue.Queue(maxsize=2) self.endpoint = None self.start_stamp = time.time() + 3 self.client = self.create_client(Trigger, '/controller_manager/init_finish') self.client.wait_for_service() self.client = self.create_client(SetBool, '/depth_cam/set_ldp_enable') self.client.wait_for_service() rgb_sub = message_filters.Subscriber(self, Image, '/depth_cam/rgb/image_raw') depth_sub = message_filters.Subscriber(self, Image, '/depth_cam/depth/image_raw') info_sub = message_filters.Subscriber(self, CameraInfo, '/depth_cam/depth/camera_info') # Synchronize timestamps, allowing a time deviation of up to 0.03 seconds(同步时间戳, 时间允许有误差在0.03s) sync = message_filters.ApproximateTimeSynchronizer([rgb_sub, depth_sub, info_sub], 3, 0.02) sync.registerCallback(self.multi_callback) #Execute feedback function(执行反馈函数) timer_cb_group = ReentrantCallbackGroup() self.timer = self.create_timer(0.0, self.init_process, callback_group=timer_cb_group) |
Initialize the parameters required for tracking and grasping, including servo control, chassis control, camera node, and kinematics node. Implement services like start, stop, and set_color. Utilize RGB and depth information from the camera, synchronizing their timestamps to ensure real-time recognition.
init_process:
160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 | def init_process(self): self.timer.cancel() msg = SetBool.Request() msg.data = False self.send_request(self.client, msg) set_servo_position(self.joints_pub, 1, ((1, 500), (2, 720), (3, 100), (4, 120), (5, 500), (10, 200))) time.sleep(1) if self.get_parameter('start').value: self.target_color = self.get_parameter('color').value msg = SetString.Request() msg.data = self.target_color self.set_color_srv_callback(msg, SetString.Response()) threading.Thread(target=self.main, daemon=True).start() self.create_service(Trigger, '~/init_finish', self.get_node_state) self.get_logger().info('\033[1;32m%s\033[0m' % 'start') |
Initialize the robotic arm posture and start the main function.
get_node_state:
180 181 182 | def get_node_state(self, request, response): response.success = True return response |
Initialize node status.
shutdown:
184 185 | def shutdown(self, signum, frame): self.running = False |
The callback function for shutting down the program sets the parameter ‘running’ to false and closes the program.
set_color_srv_callback:
187 188 189 190 191 192 193 194 195 | def set_color_srv_callback(self, request, response): self.get_logger().info('\033[1;32m%s\033[0m' % "set_color") self.target_color = request.data self.tracker = ColorTracker(self.target_color) self.get_logger().info('\033[1;32mset color: %s\033[0m' % self.target_color) self.start = True response.success = True response.message = "set_color" return response |
The set_color service allows you to directly set the color for the robot to track using a string.
start_srv_callback:
197 198 199 200 201 202 | def start_srv_callback(self, request, response): self.get_logger().info('\033[1;32m%s\033[0m' % "start") self.start = True response.success = True response.message = "start" return response |
Initialize tracking and griping service.
send_request:
216 217 218 219 220 | def send_request(self, client, msg): future = client.call_async(msg) while rclpy.ok(): if future.done() and future.result(): return future.result() |
Used to send service request.
multi_callback:
222 223 224 225 226 227 | def multi_callback(self, ros_rgb_image, ros_depth_image, depth_camera_info): if self.image_queue.full(): # If the queue is full, discard the oldest image(如果队列已满,丢弃最旧的图像) self.image_queue.get() # Put the image into the queue(将图像放入队列) self.image_queue.put((ros_rgb_image, ros_depth_image, depth_camera_info)) |
Read depth information and RGB images, synchronize them, and then push them into the queue.
get_endpoint:
229 230 231 232 233 | def get_endpoint(self): endpoint = self.send_request(self.get_current_pose_client, GetRobotPose.Request()).pose self.endpoint = common.xyz_quat_to_mat([endpoint.position.x, endpoint.position.y, endpoint.position.z], [endpoint.orientation.w, endpoint.orientation.x, endpoint.orientation.y, endpoint.orientation.z]) return self.endpoint |
Used to read the camera’s intrinsic and extrinsic parameters, facilitating the conversion between world coordinates and pixel coordinates.
Pick:
235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 | def pick(self, position): if position[2] < 0.2: yaw = 80 else: yaw = 30 msg = set_pose_target(position, yaw, [-180.0, 180.0], 1.0) res = self.send_request(self.set_pose_target_client, msg) if res.pulse: servo_data = res.pulse set_servo_position(self.joints_pub, 1, ((1, servo_data[0]), )) time.sleep(1) set_servo_position(self.joints_pub, 1.5, ((1, servo_data[0]),(2, servo_data[1]), (3, servo_data[2]),(4, servo_data[3]), (5, servo_data[4]))) time.sleep(1.5) set_servo_position(self.joints_pub, 0.5, ((10, 600),)) time.sleep(1) position[2] += 0.03 msg = set_pose_target(position, yaw, [-180.0, 180.0], 1.0) res = self.send_request(self.set_pose_target_client, msg) if res.pulse: servo_data = res.pulse set_servo_position(self.joints_pub, 1, ((1, servo_data[0]),(2, servo_data[1]), (3, servo_data[2]),(4, servo_data[3]), (5, servo_data[4]))) time.sleep(1) set_servo_position(self.joints_pub, 1, ((1, 500), (2, 720), (3, 100), (4, 120), (5, 500), (10, 600))) time.sleep(1) set_servo_position(self.joints_pub, 1, ((1, 125), (2, 635), (3, 120), (4, 200), (5, 500))) time.sleep(1) set_servo_position(self.joints_pub, 1.5, ((1, 125), (2, 325), (3, 200), (4, 290), (5, 500))) time.sleep(1.5) set_servo_position(self.joints_pub, 1, ((1, 125), (2, 325), (3, 200), (4, 290), (5, 500), (10, 200))) time.sleep(1.5) set_servo_position(self.joints_pub, 1, ((1, 500), (2, 720), (3, 100), (4, 150), (5, 500), (10, 200))) time.sleep(2) self.tracker.yaw = 500 self.tracker.pitch = 150 self.tracker.pid_yaw.clear() self.tracker.pid_pitch.clear() self.stamp = time.time() self.moving = False |
The robotic arm’s grasping strategy requires input of world coordinates, which are passed to the kinematics node. If the robotic arm can reach this position, it returns the servo angles. The servos are then controlled based on these angles, enabling the arm to grasp objects in the 3D space.
main:
275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 | def main(self): while self.running: try: ros_rgb_image, ros_depth_image, depth_camera_info = self.image_queue.get(block=True, timeout=1) except queue.Empty: if not self.running: break else: continue try: rgb_image = np.ndarray(shape=(ros_rgb_image.height, ros_rgb_image.width, 3), dtype=np.uint8, buffer=ros_rgb_image.data) depth_image = np.ndarray(shape=(ros_depth_image.height, ros_depth_image.width), dtype=np.uint16, buffer=ros_depth_image.data) result_image = np.copy(rgb_image) h, w = depth_image.shape[:2] depth = np.copy(depth_image).reshape((-1, )) depth[depth<=0] = 55555 sim_depth_image = np.clip(depth_image, 0, 2000).astype(np.float64) sim_depth_image = sim_depth_image / 2000.0 * 255.0 bgr_image = cv2.cvtColor(rgb_image, cv2.COLOR_RGB2BGR) depth_color_map = cv2.applyColorMap(sim_depth_image.astype(np.uint8), cv2.COLORMAP_JET) if self.tracker is not None and self.moving == False and time.time() > self.start_stamp and self.start: result_image, p_y, center, r = self.tracker.proc(rgb_image, result_image, self.lab_data) if p_y is not None: set_servo_position(self.joints_pub, 0.02, ((1, int(p_y[1])), (4, int(p_y[0])))) center_x, center_y = center if center_x > w: center_x = w if center_y > h: center_y = h if abs(self.last_pitch_yaw[0] - p_y[0]) < 3 and abs(self.last_pitch_yaw[1] - p_y[1]) < 3: if time.time() - self.stamp > 2: self.stamp = time.time() roi = [int(center_y) - 5, int(center_y) + 5, int(center_x) - 5, int(center_x) + 5] if roi[0] < 0: roi[0] = 0 if roi[1] > h: roi[1] = h if roi[2] < 0: roi[2] = 0 if roi[3] > w: roi[3] = w roi_distance = depth_image[roi[0]:roi[1], roi[2]:roi[3]] try: dist = round(float(np.mean(roi_distance[np.logical_and(roi_distance>0, roi_distance<10000)])/1000.0), 3) except BaseException as e: self.get_logger().info('error2: ' + str(e)) txt = "DISTANCE ERROR !!!" return if np.isnan(dist): txt = "DISTANCE ERROR !!!" return dist += 0.015 # Object radius compensation(物体半径补偿) dist += 0.015 # Error compensation(误差补偿) K = depth_camera_info.k self.get_endpoint() position = depth_pixel_to_camera((center_x, center_y), dist, (K[0], K[4], K[2], K[5])) position[0] -= 0.01 # The RGB camera and depth camera TFs have a 1cm offset(rgb相机和深度相机tf有1cm偏移) pose_end = np.matmul(self.hand2cam_tf_matrix, common.xyz_euler_to_mat(position, (0, 0, 0))) # The relative coordinates at the end of the transformation(转换的末端相对坐标) world_pose = np.matmul(self.endpoint, pose_end) # Transform into the world coordinates of the robotic arm(转换到机械臂世界坐标) pose_t, pose_R = common.mat_to_xyz_euler(world_pose) self.stamp = time.time() self.moving = True threading.Thread(target=self.pick, args=(pose_t,)).start() else: self.stamp = time.time() dist = depth_image[int(center_y),int(center_x)] if dist < 100: txt = "TOO CLOSE !!!" else: txt = "Dist: {}mm".format(dist) cv2.circle(result_image, (int(center_x), int(center_y)), 5, (255, 255, 255), -1) cv2.circle(depth_color_map, (int(center_x), int(center_y)), 5, (255, 255, 255), -1) cv2.putText(depth_color_map, txt, (10, 400 - 20), cv2.FONT_HERSHEY_PLAIN, 2.0, (0, 0, 0), 10, cv2.LINE_AA) cv2.putText(depth_color_map, txt, (10, 400 - 20), cv2.FONT_HERSHEY_PLAIN, 2.0, (255, 255, 255), 2, cv2.LINE_AA) self.last_pitch_yaw = p_y else: self.stamp = time.time() if self.enable_disp: result_image = np.concatenate([cv2.cvtColor(result_image, cv2.COLOR_RGB2BGR), depth_color_map, ], axis=1) cv2.imshow("depth", result_image) key = cv2.waitKey(1) if key == ord('q') or key == 27: # Press q or esc to exit(按q或者esc退出) self.running = False except Exception as e: self.get_logger().info('error1: ' + str(e)) rclpy.shutdown() |
This is the main function of the tracking and grasping class. It utilizes camera data for simple localization based on color, then adds depth information to convert to world coordinates. Based on the current state of the robotic arm, it can then begin tracking and grasping.
7.3.5 Object Classification
Overview
Object classification has widespread applications in industry, such as part sorting on production lines and goods classification in logistics warehouses. These applications require rapid and accurate identification and classification of objects to improve production efficiency and automation levels.
In part sorting on production lines, robots can use machine vision and image processing techniques to identify different types of parts and sort them to different locations based on predefined classification criteria. This can enhance production efficiency and accuracy while reducing manual intervention and error rates.
Furthermore, object classification has many other applications in industry, such as quality inspection, defect detection, and automated assembly. These applications also require rapid and accurate identification and classification of objects to ensure the stability and quality of the production process.
This functionality simulates object classification in industrial applications, enabling robots to recognize objects of different shapes and colors in the current environment.
Operation Steps
Note
The entered command should be case sensitive, and the “Tab” key can used to complemented the key words.
(1) Start JetRover and connect it to Nomachine remote control system.
(2) Double click on to start the command line terminal.
(3) Input the command and press Enter to disable the app auto-start service.
sudo systemctl stop start_app_node.service
(4) Input the following command to initiate object sorting program.
ros2 launch example object_classification.launch.py
(5) If you want to exit this game, press “Ctrl+C” in the terminal. Fail to do so requires multiple tries.
Outcome
Bring the object to be recognized (which can be rectangular prisms, spheres, cylinders, and their respective colors) to the front of the camera. Then, the camera will perform recognition and gripping actions in sequence based on their distance from the center of the camera’s viewpoint, starting from the closest to the farther. After successfully picking up an object, it will sort them according to their different categories and place them in their designated positions.
Program Analysis
(1) launch Analysis

Program path: ~/ros2_ws/src/example/example/rgbd_function/object_classification.launch.py
① Initiate Other Launch Files
28 29 30 31 32 33 34 35 36 37 38 39 40 41 | depth_camera_launch = IncludeLaunchDescription( PythonLaunchDescriptionSource( os.path.join(peripherals_package_path, 'launch/depth_camera.launch.py')), ) controller_launch = IncludeLaunchDescription( PythonLaunchDescriptionSource( os.path.join(controller_package_path, 'launch/controller.launch.py')), ) kinematics_launch = IncludeLaunchDescription( PythonLaunchDescriptionSource( os.path.join(kinematics_package_path, 'launch/kinematics_node.launch.py')), ) |
depth_camera_launch is used to start the camera.
controller_launch is used to start the control of the chassis, servos, and other components.
kinematics_launch starts the kinematics node to obtain the required servo angles from three-dimensional coordinates.
② Initiate Node
42 43 44 45 46 47 48 | object_classification_node = Node( package='example', executable='object_classification', output='screen', parameters=[os.path.join(example_package_path, 'config/object_classification_plane_distance.yaml'), {'category': category, 'start': start, 'debug': debug}] ) |
object_classification_node is used to launch the object classification node
(2) Python Program Analysis
This section will analyze the programming of the anti-fall game. The program source code is located at: ~/ros2_ws/src/example/example/rgbd_function/object_classification.py
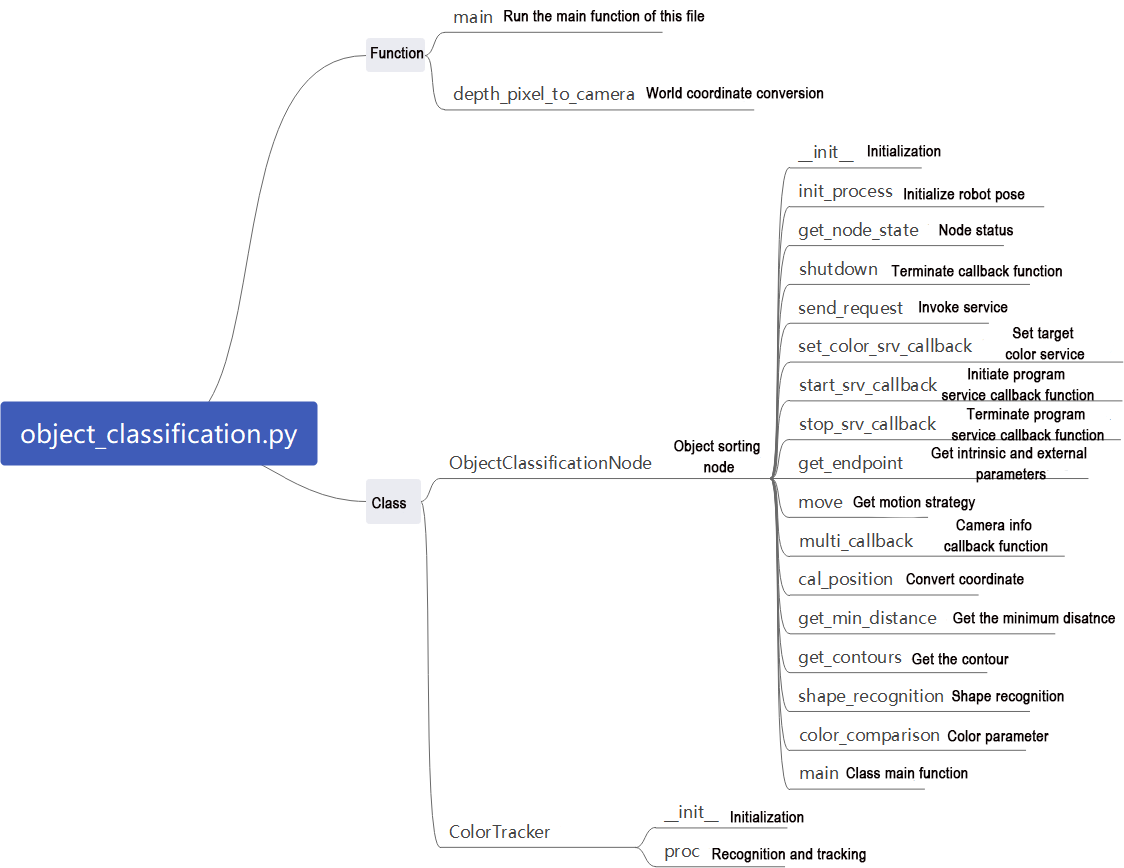
① Function: Main
511 512 513 514 515 516 | def main(): node = ObjectClassificationNode('object_classification') executor = MultiThreadedExecutor() executor.add_node(node) executor.spin() node.destroy_node() |
Starts the object classification and grasping node.
depth_pixel_to_camera:
34 35 36 37 38 39 40 | def depth_pixel_to_camera(pixel_coords, intrinsic_matrix): fx, fy, cx, cy = intrinsic_matrix[0], intrinsic_matrix[4], intrinsic_matrix[2], intrinsic_matrix[5] px, py, pz = pixel_coords x = (px - cx) * pz / fx y = (py - cy) * pz / fy z = pz return np.array([x, y, z]) |
Converts pixel coordinates to world coordinates.
② Classes: ObjectClassificationNode
Init:
61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 | def __init__(self, name): rclpy.init() super().__init__(name, allow_undeclared_parameters=True, automatically_declare_parameters_from_overrides=True) self.fps = fps.FPS() self.moving = False self.count = 0 self.running = True self.start = False self.shapes = None self.colors = None self.target_shapes = '' self.roi = [120, 240, 170, 470] self.endpoint = None self.last_position = 0, 0 self.last_object_info_list = [] signal.signal(signal.SIGINT, self.shutdown) self.language = os.environ['ASR_LANGUAGE'] self.image_queue = queue.Queue(maxsize=2) self.debug = self.get_parameter('debug').value self.plane_distance = self.get_parameter('plane_distance').value self.lab_data = common.get_yaml_data("/home/ubuntu/software/lab_tool/lab_config.yaml") self.joints_pub = self.create_publisher(ServosPosition, '/servo_controller', 1) self.buzzer_pub = self.create_publisher(BuzzerState, '/ros_robot_controller/set_buzzer', 1) self.create_service(Trigger, '~/start', self.start_srv_callback) self.create_service(Trigger, '~/stop', self.stop_srv_callback) self.create_service(SetStringList, '~/set_shape', self.set_shape_srv_callback) self.create_service(SetStringList, '~/set_color', self.set_color_srv_callback) rgb_sub = message_filters.Subscriber(self, Image, '/depth_cam/rgb/image_raw') depth_sub = message_filters.Subscriber(self, Image, '/depth_cam/depth/image_raw') info_sub = message_filters.Subscriber(self, CameraInfo, '/depth_cam/depth/camera_info') # Synchronize timestamps, allowing a time discrepancy of up to 0.03 seconds(同步时间戳, 时间允许有误差在0.03s) sync = message_filters.ApproximateTimeSynchronizer([rgb_sub, depth_sub, info_sub], 3, 0.02) sync.registerCallback(self.multi_callback) self.client = self.create_client(Trigger, '/controller_manager/init_finish') self.client.wait_for_service() self.client = self.create_client(SetBool, '/depth_cam/set_ldp_enable') self.client.wait_for_service() timer_cb_group = ReentrantCallbackGroup() self.set_joint_value_target_client = self.create_client(SetJointValue, '/kinematics/set_joint_value_target', callback_group=timer_cb_group) self.set_joint_value_target_client.wait_for_service() self.kinematics_client = self.create_client(SetRobotPose, '/kinematics/set_pose_target') self.kinematics_client.wait_for_service() self.controller = ActionGroupController(self.create_publisher(ServosPosition, 'servo_controller', 1), '/home/ubuntu/software/arm_pc/ActionGroups') self.timer = self.create_timer(0.0, self.init_process, callback_group=timer_cb_group) |
Initializes parameters required for object classification, calls servo control, chassis control, camera node, and kinematics node. Implements services like start, stop, set_shape, and set_color. Utilizes RGB and depth information from the camera, synchronizing their timestamps to ensure real-time recognition.
init_process:
112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 | def init_process(self): self.timer.cancel() msg = SetBool.Request() msg.data = False self.send_request(self.client, msg) self.goto_default() if self.get_parameter('start').value: if self.get_parameter('category').value == 'shape': msg = SetStringList.Request() msg.data = ['sphere', 'cuboid', 'cylinder'] self.set_shape_srv_callback(msg, SetStringList.Response()) else: msg = SetStringListi.Request() msg.data = ['red', 'green', 'blue'] self.set_color_srv_callback(msg, SetStringList.Response()) threading.Thread(target=self.main, daemon=True).start() self.create_service(Trigger, '~/init_finish', self.get_node_state) self.get_logger().info('\033[1;32m%s\033[0m' % 'start') |
Initializes robotic arm posture, shape, and color, then calls the main function.
get_node_state:
135 136 137 | def get_node_state(self, request, response): response.success = True return response |
Initializes node state.
shutdown:
139 140 141 | def shutdown(self, signum, frame): self.running = False self.get_logger().info('\033[1;32m%s\033[0m' % "shutdown") |
Callback function to shut down the program; sets the ‘running’ parameter to false to close the program.
send_request:
143 144 145 146 147 | def send_request(self, client, msg): future = client.call_async(msg) while rclpy.ok(): if future.done() and future.result(): return future.result() |
Publishes service requests.
set_shape_srv_callback:
149 150 151 152 153 154 155 156 | def set_shape_srv_callback(self, request, response): self.get_logger().info('\033[1;32m%s\033[0m' % "set_shape") self.colors = None self.shapes = request.data self.start = True response.success = True response.message = "set_shape" return response |
Service callback to set the shape for the robot to recognize using a string.
set_color_srv_callback:
158 159 160 161 162 163 164 165 | def set_color_srv_callback(self, request, response): self.get_logger().info('\033[1;32m%s\033[0m' % "set_color") self.shapes = None self.colors = request.data self.start = True response.success = True response.message = "set_color" return response |
Service callback to set the color for the robot to recognize using a string.
start_srv_callback:
167 168 169 170 171 172 | def start_srv_callback(self, request, response): self.get_logger().info('\033[1;32m%s\033[0m' % "start") self.start = True response.success = True response.message = "start" return response |
Service callback to start object classification.
stop_srv_callback:
174 175 176 177 178 179 180 181 182 183 184 185 186 | def stop_srv_callback(self, request, response): self.get_logger().info('\033[1;32m%s\033[0m' % "stop") self.start = False self.colors = None self.shapes = None self.moving = False self.count = 0 self.target_shapes = '' self.last_position = 0, 0 self.last_object_info_list = [] response.success = True response.message = "stop" return response |
Service callback to stop object classification, clearing or closing various parameters to halt operation.
goto_default:
188 189 190 191 192 193 194 | def goto_default(self): msg = set_joint_value_target([500.0, 470.0, 220.0, 90.0, 500.0]) endpoint = self.send_request(self.set_joint_value_target_client, msg) pose_t = endpoint.pose.position pose_r = endpoint.pose.orientation set_servo_position(self.joints_pub, 1, ((1, 500), (2, 470), (3, 220), (4, 90), (5, 500), (10, 200))) self.endpoint = common.xyz_quat_to_mat([pose_t.x, pose_t.y, pose_t.z], [pose_r.w, pose_r.x, pose_r.y, pose_r.z]) |
Retrieves camera intrinsic and extrinsic parameters for converting between world and pixel coordinates.
Move:
196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 | def move(self, obejct_info): shape, pose_t = obejct_info[:2] color, angle = obejct_info[-2:] msg = BuzzerState() msg.freq = 1900 msg.on_time = 0.2 msg.off_time = 0.01 msg.repeat = 1 self.buzzer_pub.publish(msg) time.sleep(1) if 'sphere' in shape: offset_z = -0.015 + self.pick_offset[-1] elif 'cylinder' in shape: offset_z = 0.02 + self.pick_offset[-1] else: offset_z = 0.01 + self.pick_offset[-1] if pose_t[0] > 0.21: offset_x = self.pick_offset[0] else: offset_x = self.pick_offset[1] if pose_t[1] > 0: offset_y = self.pick_offset[2] else: offset_y = self.pick_offset[3] pose_t[0] += offset_x pose_t[1] += offset_y pose_t[2] += offset_z msg = kinematics_control.set_pose_target(pose_t, 85) res1 = self.send_request(self.kinematics_client, msg) if res1.pulse: servo_data = res1.pulse set_servo_position(self.joints_pub, 1.5, ((1, servo_data[0]), (2, servo_data[1]), (3, servo_data[2]), (4, servo_data[3]), (5, servo_data[4]))) time.sleep(1.5) pose_t[2] -= 0.05 msg = kinematics_control.set_pose_target(pose_t, 85) res2 = self.send_request(self.kinematics_client, msg) if angle != 0: if 'sphere' in shape or ('cylinder' in shape and 'cylinder_horizontal_' not in shape): angle = 500 else: angle = angle % 180 angle = angle - 180 if angle > 90 else (angle + 180 if angle < -90 else angle) # self.get_logger().info(str([angle, shape])) # if angle == 90: # angle = 0 angle = 500 + int(1000 * (angle + res2.rpy[-1]) / 240) else: angle = 500 if res2.pulse: servo_data = res2.pulse set_servo_position(self.joints_pub, 0.5, ((5, angle),)) time.sleep(0.5) set_servo_position(self.joints_pub, 1, ((1, servo_data[0]), (2, servo_data[1]), (3, servo_data[2]), (4, servo_data[3]), (5, angle))) time.sleep(1) if shape == "sphere": set_servo_position(self.joints_pub, 0.6, ((10, 700),)) else: set_servo_position(self.joints_pub, 0.6, ((10, 550),)) time.sleep(0.6) if res1.pulse: servo_data = res1.pulse set_servo_position(self.joints_pub, 1, ((1, servo_data[0]), (2, servo_data[1]), (3, servo_data[2]), (4, servo_data[3]), (5, angle))) time.sleep(1) set_servo_position(self.joints_pub, 1, ((1, 500), (2, 640), (3, 150), (4, 130), (5, 500), (10, 650))) time.sleep(1) if self.colors is None: self.get_logger().info('shape: %s' % shape.split("_")[0]) if "sphere" in shape: self.controller.run_action("target_1") if "cylinder" in shape: self.controller.run_action("target_2") if "cuboid" in shape: self.controller.run_action("target_3") else: color = self.color_comparison(color) self.get_logger().info('color: %s' % color) if "red" == color: self.controller.run_action("target_1") if "blue" == color: self.controller.run_action("target_3") self.goto_default() time.sleep(2) self.moving = False |
Grasping strategy for the robotic arm. Takes world coordinates as input, computes servo angles through the kinematics node if reachable, controls the servos to grasp objects, and uses different action sets for classification based on the object’s shape.
multi_callback:
281 282 283 284 285 286 | def multi_callback(self, ros_rgb_image, ros_depth_image, depth_camera_info): if self.image_queue.full(): # If the queue is full, discard the oldest image(如果队列已满,丢弃最旧的图像) self.image_queue.get() # Put the image into the queue(将图像放入队列) self.image_queue.put((ros_rgb_image, ros_depth_image, depth_camera_info)) |
Reads depth and RGB images, synchronizes them, and pushes them into a queue.
cal_position:
288 289 290 291 292 293 294 | def cal_position(self, x, y, depth, intrinsic_matrix): position = depth_pixel_to_camera([x, y, depth / 1000], intrinsic_matrix) position[0] -= 0.01 pose_end = np.matmul(self.hand2cam_tf_matrix, common.xyz_euler_to_mat(position, (0, 0, 0))) world_pose = np.matmul(self.endpoint, pose_end) pose_t, pose_r = common.mat_to_xyz_euler(world_pose) return pose_t |
Converts pixel coordinates to world coordinates using the calibration matrix between the gripper and the camera.
get_min_distance:
296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 | def get_min_distance(self, depth_image): ih, iw = depth_image.shape[:2] # Mask certain areas to lower recognition conditions and enhance reliability(屏蔽掉一些区域,降低识别条件,使识别跟可靠) depth_image[:, :self.roi[2]] = np.array([[1000, ] * self.roi[2]] * ih) depth_image[:, self.roi[3]:] = np.array([[1000, ] * (iw - self.roi[3])] * ih) depth_image[self.roi[1]:, :] = np.array([[1000, ] * iw] * (ih - self.roi[1])) depth_image[:self.roi[0], :] = np.array([[1000, ] * iw] * self.roi[0]) depth = np.copy(depth_image).reshape((-1,)) depth[depth <= 0] = 55555 # A distance of 0 may indicate entry into a dead zone or failure to recognize due to color issues. Assign a large value to the distance(距离为0可能是进入死区,或者颜色问题识别不到,将距离赋一个大值) min_index = np.argmin(depth) # The pixel with the minimum distance(距离最小的像素) min_y = min_index // iw min_x = min_index - min_y * iw min_dist = depth_image[min_y, min_x] # Get the distance of the object that is closest to the camera(获取距离摄像头最近的物体的距离) return min_dist |
Masks parts of the image to enhance recognition reliability, outputs the distance to the nearest point from the camera using cropping and comparison methods.
get_contours:
313 314 315 316 317 318 319 320 321 322 323 324 325 326 | def get_contours(self, depth_image, min_dist): depth_image = np.where(depth_image > self.plane_distance - 10, 0, depth_image) # cv2.imshow('1', depth_image) depth_image = np.where(depth_image > min_dist + 40, 0, depth_image) # Set pixels with depth values greater than the minimum distance of 15mm to 0(将深度值大于最小距离15mm的像素置0) # cv2.imshow('2', depth_image) sim_depth_image_sort = np.clip(depth_image, 0, self.plane_distance - 10).astype(np.float64) / (self.plane_distance - 10) * 255 # cv2.imshow('3', sim_depth_image_sort) depth_gray = sim_depth_image_sort.astype(np.uint8) _, depth_bit = cv2.threshold(depth_gray, 1, 255, cv2.THRESH_BINARY) # depth_bit = cv2.erode(depth_bit, np.ones((5, 5), np.uint8), depth_bit) # cv2.imshow('depth_bit', depth_bit) contours, hierarchy = cv2.findContours(depth_bit, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE) # self.get_logger().info(str(min_dist)) return contours |
Masks areas using numpy functions to enable the robot to recognize various objects.
shape_recognition:
328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 383 384 385 386 387 388 389 390 391 392 393 394 395 396 | def shape_recognition(self, rgb_image, depth_image, depth_color_map, intrinsic_matrix, min_dist): object_info_list = [] image_height, image_width = depth_image.shape[:2] if min_dist <= 300: # If it is greater than 300, it means the object is lower than the gound, and the detection may be not correct(大于这个值说明已经低于地面了,可能检测有误) sphere_index = 0 cuboid_index = 0 cylinder_index = 0 cylinder_horizontal_index = 0 contours = self.get_contours(depth_image, min_dist) for obj in contours: area = cv2.contourArea(obj) # self.get_logger().info(srt(area)) if area < 300: continue # cv2.drawContours(depth_color_map, obj, -1, (255, 255, 0), 10) # Draw contour line(绘制轮廓线) perimeter = cv2.arcLength(obj, True) # Calculate the perimeter of the contour(计算轮廓周长) approx = cv2.approxPolyDP(obj, 0.035 * perimeter, True) # Get the coordinates of the contour corner points(获取轮廓角点坐标) # cv2.drawContours(depth_color_map, approx, -1, (255, 0, 0), 4) # Get contour line(绘制轮廓线) CornerNum = len(approx) (cx, cy), r = cv2.minEnclosingCircle(obj) center, (width, height), angle = cv2.minAreaRect(obj) if angle < -45: angle += 89 if width > height and width / height > 1.5: angle = angle + 90 depth = depth_image[int(cy), int(cx)] position = self.cal_position(cx, cy, depth, intrinsic_matrix) x, y, w, h = cv2.boundingRect(approx) mask = np.full((image_height, image_width), 0, dtype=np.uint8) cv2.drawContours(mask, [obj], -1, (255), cv2.FILLED) # Calculate the standard deviation of pixel values within the contour area(计算轮廓区域内像素值的标准差) depth_image_mask = np.where(depth_image == 0, np.nan, depth_image) depth_std = np.nanstd(mask) # arr = np.where(mask == 0, np.nan, depth_image_mask) # cv2.imshow('mask', np.where(mask == 0, np.nan, depth_image_mask)) objType = None # self.get_logger().info(str([depth_std, CornerNum])) if depth_std > 30.0 and CornerNum > 4: sphere_index += 1 angle = 0 objType = 'sphere_' + str(sphere_index) elif depth_std > 24.0: cuboid_index += 1 objType = "cuboid_" + str(cuboid_index) elif depth_std > 18.0: # self.get_logger().info(str(abs(width/height - 1))) if abs(width/height - 1) < 0.2: cuboid_index += 1 objType = "cuboid_" + str(cuboid_index) else: cylinder_horizontal_index += 1 objType = "cylinder_horizontal_" + str(cylinder_horizontal_index) else: cylinder_index += 1 angle = 0 objType = "cylinder_" + str(cylinder_index) if objType is not None: object_info_list.append([objType, position, depth, [x, y, w, h, center, width, height], rgb_image[int(center[1]), int(center[0])], angle]) # cv2.putText(depth_color_map, objType[:-2], (x + w // 2, y + (h //2) - 10), cv2.FONT_HERSHEY_COMPLEX, 1.0, (0, 0, 0), 2, cv2.LINE_AA) # cv2.putText(depth_color_map, objType[:-2], (x + w // 2, y + (h //2) - 10), cv2.FONT_HERSHEY_COMPLEX, 1.0, (255, 255, 255), 1) cv2.rectangle(depth_color_map, (x, y), (x + w, y + h), (255, 255, 255), 2) return object_info_list |
Performs shape recognition based on contour area size, calculates contour width, height, and angle using OpenCV, and determines shapes based on standard deviation calculations on the contour.
color_comparison:
398 399 400 401 402 403 404 | def color_comparison(self, rgb): if rgb[0] > rgb[1] and rgb[0] > rgb[2]: return 'red' elif rgb[2] > rgb[1] and rgb[2] > rgb[1]: return 'blue' else: return None |
Compares recognized contours to verify if they match the required color.
Main:
406 407 408 409 410 411 412 413 414 415 416 417 418 419 420 421 422 423 424 425 426 427 428 429 430 431 432 433 434 435 436 437 438 439 440 441 442 443 444 445 446 447 448 449 450 451 452 453 454 455 456 457 458 459 460 461 462 463 464 465 466 467 468 469 470 471 472 473 474 475 476 477 478 479 480 481 482 483 484 485 486 487 488 489 490 491 492 493 494 495 496 497 498 499 500 501 502 503 504 505 506 507 508 509 | def main(self): count = 0 while self.running: try: ros_rgb_image, ros_depth_image, depth_camera_info = self.image_queue.get(block=True, timeout=1) except queue.Empty: if not self.running: break else: continue try: rgb_image = np.ndarray(shape=(ros_rgb_image.height, ros_rgb_image.width, 3), dtype=np.uint8, buffer=ros_rgb_image.data) depth_image = np.ndarray(shape=(ros_depth_image.height, ros_depth_image.width), dtype=np.uint16, buffer=ros_depth_image.data) # cv2.imshow('rgb', cv2.applyColorMap(depth_image.astype(np.uint8), cv2.COLORMAP_JET)) depth_image = depth_image.copy() min_dist = self.get_min_distance(depth_image) if self.debug: count += 1 self.get_logger().info(str(min_dist)) if count > 50: count = 0 data = {'/**': {'ros__parameters': {'plane_distance': {}}}} data['/**']['ros__parameters']['plane_distance'] = int(min_dist) common.save_yaml_data(data, os.path.join( os.path.abspath(os.path.join(os.path.split(os.path.realpath(__file__))[0], '../..')), 'config/object_classification_plane_distance.yaml')) msg = BuzzerState() msg.freq = 1900 msg.on_time = 0.2 msg.off_time = 0.01 msg.repeat = 1 self.buzzer_pub.publish(msg) self.debug = False else: #Limit the pixel values of the depth image within the range of 0 to 350, and normalize the pixel values of the depth image to the range of 0 to 255(像素值限制在0到350的范围内, 将深度图像的像素值限制和归一化到0到255的范围内) sim_depth_image = np.clip(depth_image, 0, 350).astype(np.float64) / 350 * 255 depth_color_map = cv2.applyColorMap(sim_depth_image.astype(np.uint8), cv2.COLORMAP_JET) if not self.moving: object_info_list = self.shape_recognition(rgb_image, depth_image, depth_color_map, depth_camera_info.k, min_dist) if self.start: reorder_object_info_list = object_info_list if object_info_list: if self.last_object_info_list: # Reorder based on the contrast of the previous object's position(对比上一次的物体的位置来重新排序) reorder_object_info_list = position_reorder(object_info_list, self.last_object_info_list, 20) if reorder_object_info_list: if not self.target_shapes: if self.shapes is not None: indices = [i for i, info in enumerate(reorder_object_info_list) if info[0].split('_')[0] in self.shapes] else: indices = [i for i, info in enumerate(reorder_object_info_list) if self.color_comparison(info[-2]) in self.colors] if indices: min_depth_index = min(indices, key=lambda i: reorder_object_info_list[i][2]) self.target_shapes = reorder_object_info_list[min_depth_index][0].split('_')[0] else: # for i, info in enumerate(reorder_object_info_list): target_index = [i for i, info in enumerate(reorder_object_info_list) if info[0].split('_')[0] == self.target_shapes] if target_index: target_index = target_index[0] obejct_info = reorder_object_info_list[target_index] x, y, w, h, center, width, height = obejct_info[3] angle = obejct_info[-1] cv2.putText(depth_color_map, self.target_shapes, (x + w // 2, y + (h // 2) - 10), cv2.FONT_HERSHEY_COMPLEX, 1.0, (0, 0, 0), 2, cv2.LINE_AA) cv2.putText(depth_color_map, self.target_shapes, (x + w // 2, y + (h // 2) - 10), cv2.FONT_HERSHEY_COMPLEX, 1.0, (255, 255, 255), 1) cv2.drawContours(depth_color_map, [np.int0(cv2.boxPoints((center, (width, height), angle)))], -1, (0, 0, 255), 2, cv2.LINE_AA) position = obejct_info[1] e_distance = round(math.sqrt(pow(self.last_position[0] - position[0], 2)) + math.sqrt( pow(self.last_position[1] - position[1], 2)), 5) if e_distance <= 0.005: self.count += 1 else: self.count = 0 if self.count > 5: self.count = 0 self.target_shapes = None self.moving = True # if self.colors is not None: # voice_play.play(self.color_comparison(obejct_info[-2]), language=self.language) # else: # voice_play.play(obejct_info[0].split('_')[0], language=self.language) threading.Thread(target=self.move, args=(obejct_info,)).start() self.last_position = position else: self.target_shapes = None self.last_object_info_list = reorder_object_info_list cv2.rectangle(rgb_image, (self.roi[2], self.roi[0]), (self.roi[3], self.roi[1]), (255, 255, 0), 1) bgr_image = cv2.cvtColor(rgb_image, cv2.COLOR_RGB2BGR) self.fps.update() result_image = np.concatenate([depth_color_map, bgr_image], axis=1) cv2.imshow("depth", result_image) key = cv2.waitKey(1) if key == ord('q') or key == 27: # Press q or esc to exit(按q或者esc退出) self.running = False except Exception as e: self.get_logger().info(str(e)) rclpy.shutdown() |
Main function of the object classification class. Uses camera data to identify shapes based on depth information, compares RGB images to verify if recognized contours match the target color, sorts objects by height, and performs grasping and classification after sorting.