8 Robotic Arm Vision Applications
8.1 Servo Deviation Calibration
As the robot is operated, mechanical angle deviations on the mounted servos will increase over time. If the robot’s joints fail to reach the specified target points during operation, manual calibration of the servo deviations is required by following the steps in this document.
Note
All servos are factory-calibrated prior to shipment. Consequently, calibration is unnecessary upon unboxing or during the initial period of operation. Manual calibration following this document is only required if significant deviations occur that impair normal functionality.
8.1.1 Calibration Standards
Before starting servo deviation calibration, identify the ID number of each servo in the PC software.
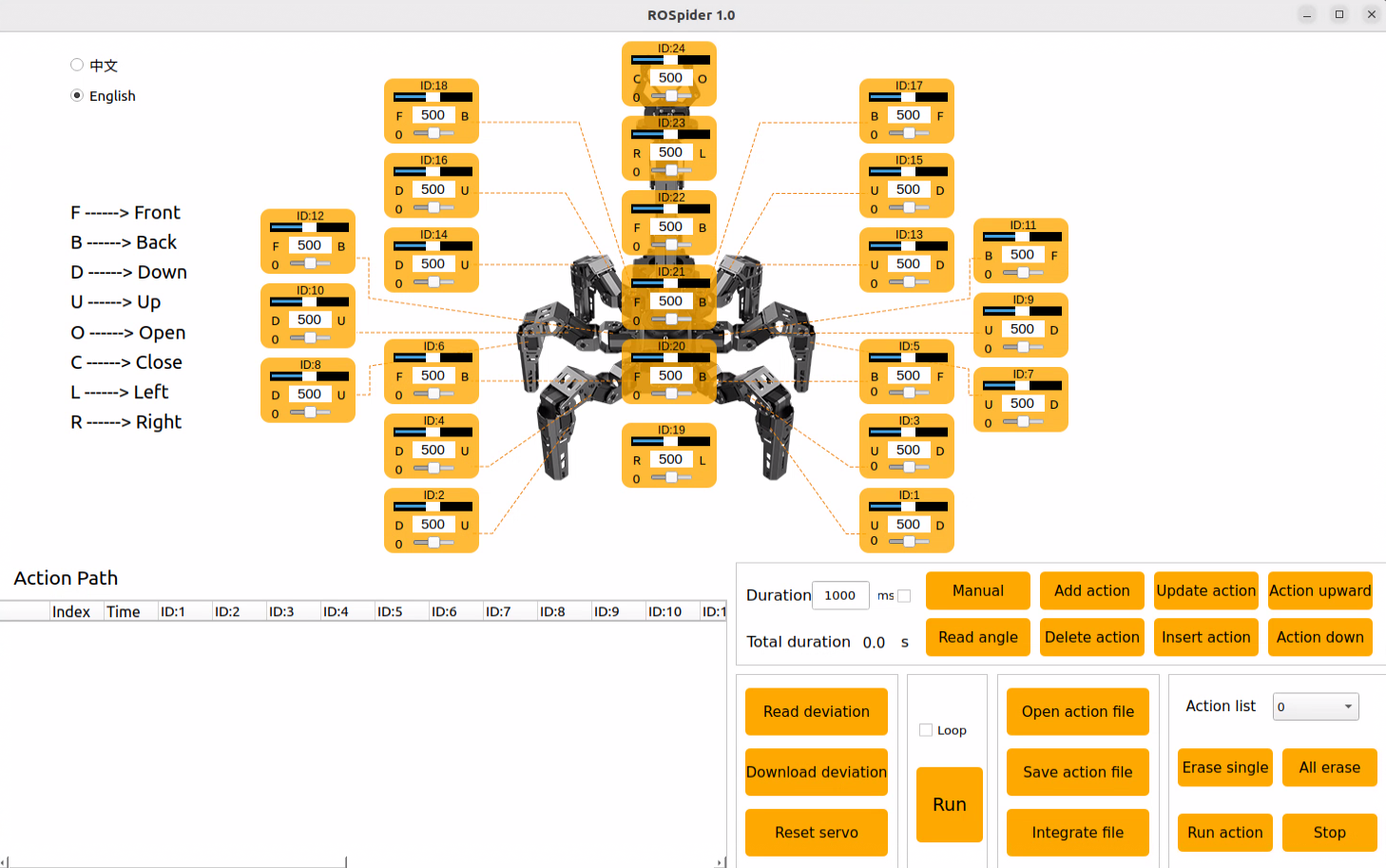
During servo deviation calibration, refer to the standard calibration diagram. The robot’s calibration is considered acceptable only when all four of the following criteria are strictly met:
The robotic arm points straight up and is perpendicular to the chassis. As seen from the image, several servos align on the center servo horn, meaning a conceptual connection line through the center screws of the servo horns can pass vertically through these servos.

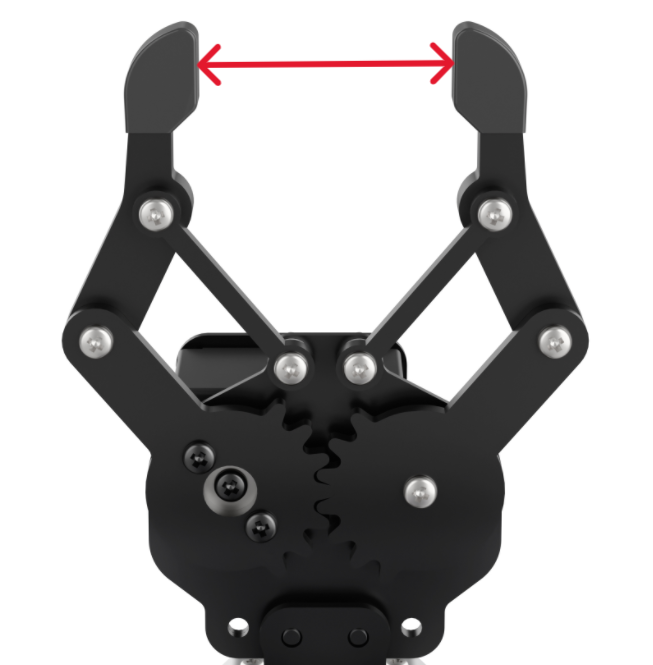
The opening distance of the robotic arm’s gripper should be maintained at 2-3 cm. This distance serves as the neutral point standard for the gripper servo. The measurement can be quickly verified using the combined width of an index and middle finger. A perfect fit indicates the standard is met.
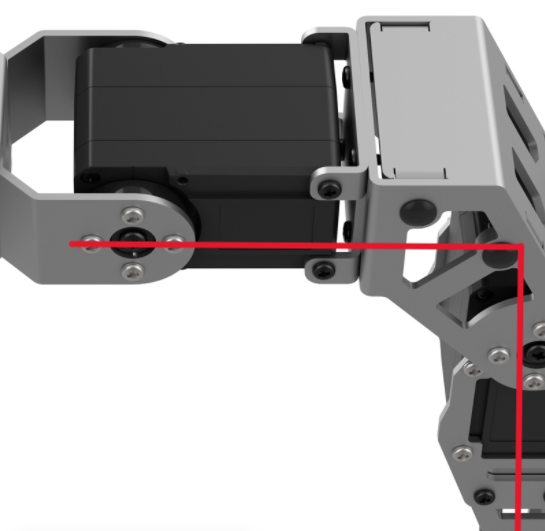
The leg forms a 90° right angle in the reset state.
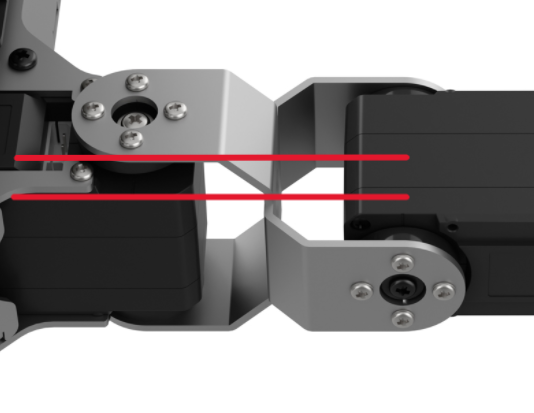
The edge of the large U-shaped cross bracket on the chassis is parallel to the edge of the inner servo.
8.1.2 Calibration Steps
After understanding the calibration standards, the robot’s deviation can be calibrated accordingly.
Specific steps are as follows:
Connect the robot, then click the ROSpider PC software icon on the desktop.
Click the Reset servo button. For example, a deviation has occurred on servo ID 21 in the robotic arm.
Click the Read deviation button to obtain the corresponding deviation value of the servo currently mounted on the robotic arm.
Wait for the success! pop-up window to appear, then click the OK button.
Check the deviation value of servo ID: 21, as shown in the figure below. In the figure, each servo has its corresponding ID number. The upper slider represents the current position, the middle value displays its numerical position, and the bottom slider represents the set deviation value of the servo.
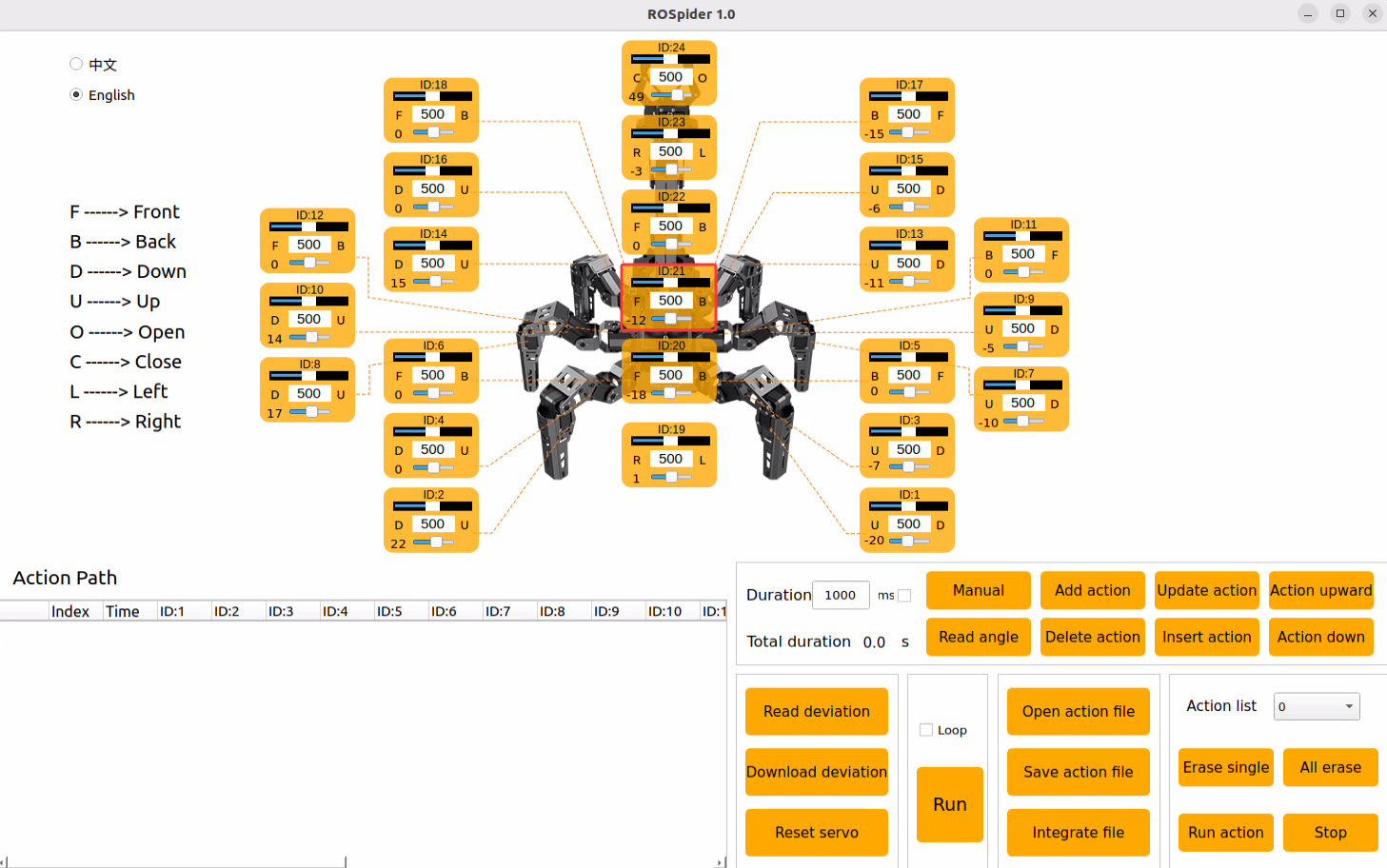
The current deviation value of servo 21 is -12. When such a deviation occurs on servo 21, it needs to be adjusted in the opposite direction until it is calibrated to the first state outlined in 8.1.1 Calibration Standards.
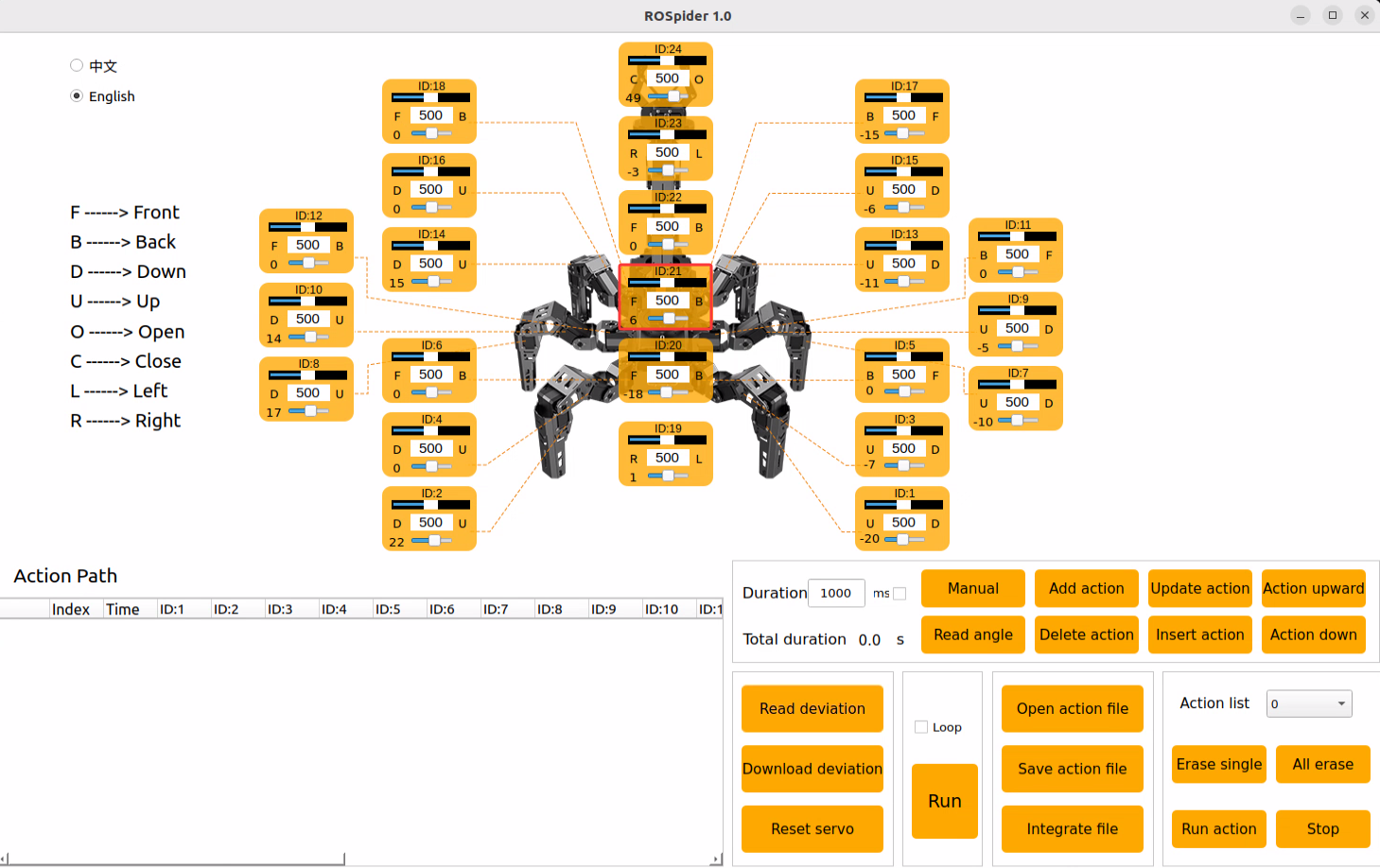
The deviation value of servo 21 is now adjusted to “6”, completing the deviation calibration for servo 21. The current value must be saved to the robot’s system according to subsequent steps. After the robot restarts, it will read the currently saved deviation for servo control. The calibration method for servos with other ID numbers is identical.
Click Download deviation.
Wait for the success! prompt window to appear, click OK to exit the window, thus completing the deviation calibration for servo 21.
When it is necessary to return the robotic arm to the initialized state, select init in the action group, and then click Run action.
If any other bus servos on the robot exhibit unacceptable deviations, repeat the steps above by adjusting the corresponding servo ID slider in the PC software to correct the alignment.
8.2 2D Vision: Color Tracking
8.2.1 Experiment Introduction
The first-person perspective utilizes the robot’s own viewpoint to complete color block tracking tasks. Before starting, the color blocks required for the experiment must be prepared. First, the program subscribes to the topic message published by the color recognition node to obtain the recognized color information. Then, after matching the target color, it acquires the center position of the target image. Finally, it calculates the angle required to align the center of the frame with the target image center via inverse kinematics, publishes the corresponding topic message, and controls the servo rotation to make the robotic arm track the target movement.
8.2.2 Operation Steps
Note
Commands are strictly case-sensitive, and the Tab key can be used to auto-complete keywords.
Power on ROSpider and connect it to the remote control software NoMachine. For instructions on connecting to the remote desktop, refer to 1. ROSpider User Manual \1.4 Development Environment Setup.
Click the desktop icon
 to open the terminal.
to open the terminal.Enter the command to stop auto-start services.
~/.stop_ros.sh
Enter the command to launch the color recognition feature.
ros2 launch example color_track_node.launch.py
To stop the feature, press Ctrl + C in the command line terminal interface. If the feature does not close immediately, try pressing Ctrl + C a few more times.
8.2.3 Program Outcome
After launching the feature, place a red block in front of the camera. The returned video feed will mark the identified target color, and the robotic arm will continuously track the movement of the target block.
8.2.4 Program Analysis
8.2.4.1 Launch File Analysis
This launch file is located at:
/home/ubuntu/ros2_ws/src/example/example/color_track/color_track_node.launch.py
The program defines the content to be launched, obtains the paths for the
controller,arm_kinematics, andexamplepackages, and launches thecontroller.launch,arm_kinematics_node.launch, andcolor_detect_node.launchfiles. It creates the ROS2 nodecolor_track_node, defines the executable file, and finally returns the launch list.
if compiled == 'True':
controller_package_path = get_package_share_directory('controller')
arm_kinematics_package_path = get_package_share_directory('arm_kinematics')
example_package_path = get_package_share_directory('example')
else:
controller_package_path = '/home/ubuntu/ros2_ws/src/driver/controller'
arm_kinematics_package_path = '/home/ubuntu/ros2_ws/src/driver/arm_kinematics'
example_package_path = '/home/ubuntu/ros2_ws/src/example'
controller_launch = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(controller_package_path, 'launch/controller.launch.py')),
)
arm_kinematics_launch = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(arm_kinematics_package_path, 'launch/arm_kinematics_node.launch.py')),
)
color_detect_launch = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(example_package_path, 'example/opencv_example/color_detect_node.launch.py')),
launch_arguments={
'enable_display': enable_display,
}.items()
)
color_track_node = Node(
package='example',
executable='color_track',
output='screen',
parameters=[{'start': start}]
)
The entry function for the ROS2 Launch file, defining the content to be launched.
def generate_launch_description():
return LaunchDescription([
OpaqueFunction(function = launch_setup)
])
Creates a
LaunchServiceand passes the launch content to it for execution.
if __name__ == '__main__':
# Create a LaunchDescription object
ld = generate_launch_description()
ls = LaunchService()
ls.include_launch_description(ld)
ls.run()
8.2.4.2 Python Source Code Analysis
The program source code is located at:
/home/ubuntu/ros2_ws/src/example/example/color_track/color_track_node.py
The program creates a
joints_pubpublisher for sending servo control messages. It creates a subscription to the'/color_detect/color_info'topic, and clients to request services such as'/controller_manager/init_finish','/arm_kinematics/init_finish', and'/color_detect/set_param'. It also initializes the robotic arm position and robot pose.
self.joints_pub = self.create_publisher(ServosPosition, '/servo_controller', 1) # Servo control
self.create_subscription(ColorsInfo, '/color_detect/color_info', self.get_color_callback, 1)
timer_cb_group = ReentrantCallbackGroup()
self.create_service(Trigger, '~/start', self.start_srv_callback) # Enter the feature
self.create_service(Trigger, '~/stop', self.stop_srv_callback, callback_group=timer_cb_group) # Exit the feature
self.create_service(SetString, '~/set_color', self.set_color_srv_callback, callback_group=timer_cb_group) # Set color
self.client = self.create_client(Trigger, '/controller_manager/init_finish')
self.client.wait_for_service()
self.client = self.create_client(Trigger, '/arm_kinematics/init_finish')
self.client.wait_for_service()
self.set_color_client = self.create_client(SetColorDetectParam, '/color_detect/set_param', callback_group=timer_cb_group)
self.set_color_client.wait_for_service()
self.arm_kinematics_client = self.create_client(SetRobotPose, '/arm_kinematics/set_pose_target')
self.arm_kinematics_client.wait_for_service()
self.timer = self.create_timer(0.0, self.init_process, callback_group=timer_cb_group)
The
set_color_srv_callbackcallback function receives theSetColorDetectParamservice request, extracts color data from the request, and initiates the color tracking function by sending a service request.
def set_color_srv_callback(self, request, response):
self.get_logger().info('\033[1;32m%s\033[0m' % "set_color")
msg = SetColorDetectParam.Request()
msg_red = ColorDetect()
msg_red.color_name = request.data
msg_red.detect_type = 'circle'
msg.data = [msg_red]
res = self.send_request(self.set_color_client, msg)
if res.success:
self.get_logger().info('\033[1;32m%s\033[0m' % 'start_track_%s'%msg_red.color_name)
else:
self.get_logger().info('\033[1;32m%s\033[0m' % 'track_fail')
response.success = True
response.message = "set_color"
return response
The main control function processes visual input in robot control by obtaining color block data via the
get_color_callbackcallback. It controls the movement of the robotic arm based on the target center position in the image. PID controllers are simultaneously used to calculate the arm’s displacement, adjusting its position through inverse kinematics and servo control.
def main(self):
while self.running:
if self.center is not None and self.start:
t1 = time.time()
center = self.center
self.pid_y.SetPoint = center.width/2
self.pid_y.update(center.x)
self.y_dis += self.pid_y.output
if self.y_dis < 200:
self.y_dis = 200
if self.y_dis > 600:
self.y_dis = 600
self.pid_z.SetPoint = center.height/2
self.pid_z.update(center.y)
self.z_dis += self.pid_z.output
if self.z_dis > 0.37:
self.z_dis = 0.37
if self.z_dis < 0.30:
self.z_dis = 0.30
msg = set_pose_target([self.x_init, 0.0, self.z_dis], 0.0, [-180.0, 180.0], 1.0)
res = self.send_request(self.arm_kinematics_client, msg)
t2 = time.time()
t = t2 - t1
if t < 0.02:
time.sleep(0.02 - t)
if res.pulse:
servo_data = res.pulse
set_servo_position(self.joints_pub, 0.02, ((24, 500), (23, 500), (22, servo_data[3]), (21, servo_data[2]), (20, servo_data[1]),(19, int(self.y_dis))))
else:
set_servo_position(self.joints_pub, 0.02, ((19, int(self.y_dis)), ))
else:
time.sleep(0.01)
self.init_action()
rclpy.shutdown()
8.3 2D Vision: Auto Shooting
8.3.1 Experiment Introduction
First, the program utilizes OpenCV for color recognition and image processing. Upon identifying the target, it analyzes the image position feedback to determine if the target is centered. If centered, the robot approaches the target and executes a kick once within a designated range. Otherwise, the robot adjusts left or right to align with the target center before repeating the approach sequence.
8.3.2 Operation Steps
Note
Commands are strictly case-sensitive, and the Tab key can be used to auto-complete keywords.
Power on ROSpider and connect it to the remote control software NoMachine. For instructions on connecting to the remote desktop, refer to 1. ROSpider User Manual \1.4 Development Environment Setup.
Click the desktop icon
to open the terminal.Enter the command to stop auto-start services.
~/.stop_ros.sh
Enter the command to launch the auto-shooting feature.
ros2 launch app intelligent_kick_node.launch.py debug:=true
Open a new command terminal and enter the command to request the service to start.
ros2 service call /intelligent_kick/enter std_srvs/srv/Trigger {}
Left-click the video stream to sample a color. Then, enter the command in the newly opened terminal to start the feature.
ros2 service call /intelligent_kick/set_running std_srvs/srv/SetBool "{data: True}"
To stop the feature, press Ctrl + C in the command line terminal interface. If the feature does not close immediately, try pressing Ctrl + C a few more times.
8.3.3 Program Outcome
When a red ball appears in the camera’s view, the robot will automatically perform color recognition. Once detected, the robot will adjust its position to approach the ball and kick it forward.
8.3.4 Program Analysis
8.3.4.1 Launch File Analysis
This launch file is located at:
/home/ubuntu/ros2_ws/src/app/launch/intelligent_kick_node.launch.py
The program defines the content to be launched, obtains paths for the
controllerandexamplepackages, and launchescontroller.launchandcolor_detect_node.launch. It creates the ROS2 nodeintelligent_kick_node, defines the executable file, and finally returns the launch list.
def launch_setup(context):
compiled = os.environ['need_compile']
debug = LaunchConfiguration('debug', default='false')
debug_arg = DeclareLaunchArgument('debug', default_value=debug)
if compiled == 'True':
controller_package_path = get_package_share_directory('controller')
peripherals_package_path = get_package_share_directory('peripherals')
else:
controller_package_path = '/home/ubuntu/ros2_ws/src/driver/controller'
peripherals_package_path = '/home/ubuntu/ros2_ws/src/peripherals'
intelligent_kick_node = GroupAction([
IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(peripherals_package_path, 'launch/depth_camera.launch.py')),
condition=IfCondition(debug),
),
IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(controller_package_path, 'launch/controller.launch.py')),
condition=IfCondition(debug),
),
Node(
package='app',
executable='intelligent_kick',
output='screen',
parameters=[{'debug': debug}],
),
])
return [debug_arg,
intelligent_kick_node,
]
The entry function for the ROS2 Launch file, defining the content to be launched.
def generate_launch_description():
return LaunchDescription([
OpaqueFunction(function = launch_setup)
])
Creates a
LaunchServiceand passes the launch content to it for execution.
if __name__ == '__main__':
# Create a LaunchDescription object
ld = generate_launch_description()
ls = LaunchService()
ls.include_launch_description(ld)
ls.run()
8.3.4.2 Python Source Code Analysis
The program source code is located at:
/home/ubuntu/ros2_ws/src/app/app/intelligent_kick.py
The program creates
joints_pubandcmd_vel_pubpublishers to send servo and chassis control messages. Creates subscriptions to'/color_detect/color_info'topics, and clients to request services like'/controller_manager/init_finish','/arm_kinematics/init_finish', and'/color_detect/set_param'. Initializes the robotic arm position and robot pose.
self.joints_pub = self.create_publisher(ServosPosition, '/servo_controller', 1) # Servo control
self.cmd_vel_pub = self.create_publisher(Twist, '/controller/cmd_vel', 1) # Chassis control
self.image_sub = self.create_subscription(Image, '/color_detect/image_result', self.image_callback , 1)
self.create_subscription(ColorsInfo, '/color_detect/color_info', self.get_color_callback, 1)
timer_cb_group = ReentrantCallbackGroup()
self.create_service(Trigger, '~/start', self.start_srv_callback) # Enter feature
self.create_service(SetString, '~/set_color', self.set_color_srv_callback, callback_group=timer_cb_group) # Set color
self.client = self.create_client(Trigger, '/controller_manager/init_finish')
self.client.wait_for_service()
self.client = self.create_client(Trigger, '/arm_kinematics/init_finish')
self.client.wait_for_service()
self.set_color_client = self.create_client(SetColorDetectParam, '/color_detect/set_param', callback_group=timer_cb_group)
self.set_color_client.wait_for_service()
self.arm_kinematics_client = self.create_client(SetRobotPose, '/arm_kinematics/set_pose_target')
self.arm_kinematics_client.wait_for_service()
The
set_color_srv_callbackcallback receivesSetColorDetectParamservice requests, extracts color data, and starts color tracking via a service request.
def set_color_srv_callback(self, request, response):
self.get_logger().info('\033[1;32m%s\033[0m' % "set_color")
msg = SetColorDetectParam.Request()
msg_red = ColorDetect()
msg_red.color_name = request.data
msg_red.detect_type = 'circle'
msg.data = [msg_red]
res = self.send_request(self.set_color_client, msg)
if res.success:
self.get_logger().info('\033[1;32m%s\033[0m' % 'start_track_%s'%msg_red.color_name)
else:
self.get_logger().info('\033[1;32m%s\033[0m' % 'track_fail')
response.success = True
response.message = "set_color"
return response
Uses PID for servo control, where
pid_ycontrols servo 19 andpid_xcontrols servo 22. Range limits prevent out-of-bounds movement, utilizingy_disandx_disto set servo positions.pid_Ydictates the robot’s left/right rotation, whilepid_Xdictates forward/backward movement. Once the target is detected within the kicking zone, the kicking action is triggered.
self.pid_y.SetPoint = center.width/2
self.pid_y.update(center.x)
self.y_dis += self.pid_y.output
if self.y_dis < 350:
self.y_dis = 350
if self.y_dis > 650:
self.y_dis = 650
if self.x_dis < 150:
self.x_dis = 150
if self.x_dis > 250:
self.x_dis = 250
self.pid_x.SetPoint = center.height/2
self.pid_x.update(center.y)
self.x_dis += self.pid_x.output
t2 = time.time()
t = t2 - t1
if t < 0.02:
time.sleep(0.02 - t)
set_servo_position(self.joints_pub, 0.02, ((19, self.y_dis), (22, int(self.x_dis))))
self.pid_Y.SetPoint = 500 # Initial value for servo 19
self.pid_Y.update(self.y_dis)
self.pid_X.SetPoint = 200 # Initial value for servo 22
self.pid_X.update(self.x_dis)
if self.pid_Y.output < -0.5 :
twist.angular.z = 0.1
elif self.pid_Y.output > 0.5:
twist.angular.z = -0.1
elif self.pid_X.output < 1 or center.y < 225:
twist.linear.x = 0.03
elif self.pid_X.output > 1.2 or center.y > 280:
twist.linear.x = -0.02
elif 300 < center.x < 330 and 225 < center.y < 280:
self.kick = True
if self.kick:
self.kick_ball(center)
self.kick = False
8.4 2D Vision: Navigation & Transport
8.4.1 Experiment Introduction
First, the program subscribes to the camera node’s topic to acquire image frames. Next, it initiates the navigation service to retrieve the target destination. Finally, once the destination is reached and the target color block is detected, the servo control node publishes messages to control the robotic arm and execute the pick-and-place task.
8.4.2 Operation Steps
Note
Commands are strictly case-sensitive, and the Tab key can be used to auto-complete keywords.
Power on ROSpider and connect it to the remote control software NoMachine. For instructions on connecting to the remote desktop, refer to 1. ROSpider User Manual \ 4. Development Environment Setup. If mapping has not yet been performed, map the environment and save the map according to the mapping and navigation tutorial.
Click the desktop icon
to open the terminal.Enter the command to stop auto-start services.
~/.stop_ros.sh
Enter the command to start the gripper calibration. Wait for the robotic arm’s initial descent, then manually position the red block between the gripper jaws. Finally, wait for the arm’s second descent to secure the block.
ros2 launch example automatic_pick.launch.py debug:=pick
Press Ctrl + C in the terminal interface to close grasping calibration, and enter the command to launch the navigation & transport feature.
ros2 launch example navigation_transport.launch.py map:=map_01
To stop the feature, press Ctrl + C in the command-line terminal interface. If the feature does not close immediately, try pressing Ctrl + C a few more times.
8.4.3 Program Outcome
After opening RVIZ, verify whether the robot’s position on the map corresponds to its actual physical location. If it does not match, manual adjustment is required utilizing the 2D Pose Estimate tool in RVIZ. The RVIZ software menu bar contains four tools: 2D Pose Estimate, 2D Goal Pose, Publish Point, and Nav2 Goal.

2D Pose Estimate configures the robot’s initial position. 2D Goal Pose sets a single target point for the robot, suitable for basic navigation tasks that do not involve complex issues like obstacle avoidance and path planning. Publish Point defines multiple target points for the robot. Nav2 Goal designates more complex navigation targets, such as specifying a target point, a target posture, or a target area. Click the 2D Goal Pose tool in the software menu bar, select a location on the map interface as the target point, and single-click with the mouse at that point. Once selected, the robot will automatically generate a route and move to the target point.
Upon navigating to the location containing the red block, the robot will automatically grasp the color block after recognition. It will then navigate to the next destination, automatically placing the block upon arrival, thus completing the transport task.
Note
The program executes only one pick-and-place task per run. To repeat the process, the demo must be relaunched.
8.4.4 Program Analysis
8.4.4.1 Launch File Analysis
This launch file is located at:
/home/ubuntu/ros2_ws/src/example/example/navigation_transport/navigation_transport.launch.py
The program defines the content to launch, obtains paths for the slam, navigation, and example packages, and launches the
automatic_pick.launch,bringup.launch, andcolor_detect_node.launchfiles. It creates the ROS2 nodesnavigation_transport_nodeandrviz_node, defines executables, and creates action groups to delay navigation startup. Finally returns the launch list.
if compiled == 'True':
slam_package_path = get_package_share_directory('slam')
navigation_package_path = get_package_share_directory('navigation')
example_package_path = get_package_share_directory('example')
else:
slam_package_path = '/home/ubuntu/ros2_ws/src/slam'
navigation_package_path = '/home/ubuntu/ros2_ws/src/navigation'
example_package_path = '/home/ubuntu/ros2_ws/src/example'
automatic_pick_launch = IncludeLaunchDescription(
PythonLaunchDescriptionSource(os.path.join(example_package_path, 'example/navigation_transport/automatic_pick.launch.py')),
launch_arguments={
'broadcast': broadcast,
'debug': debug,
'place_without_color': place_without_color,
'place_position': place_position,
'master_name': master_name,
'robot_name': robot_name,
'enable_display': 'false',
}.items(),
)
navigation_launch = IncludeLaunchDescription(
PythonLaunchDescriptionSource(os.path.join(navigation_package_path, 'launch/include/bringup.launch.py')),
launch_arguments={
'use_sim_time': 'false',
'map': os.path.join(slam_package_path, 'maps', map_name + '.yaml'),
'params_file': os.path.join(navigation_package_path, 'config', 'nav2_params.yaml'),
'namespace': robot_name,
'use_namespace': 'false',
'autostart': 'true',
}.items(),
)
navigation_transport_node = Node(
package='example',
executable='navigation_transport',
output='screen',
parameters=[{'map_frame': 'map', 'nav_goal': '/nav_goal'}]
)
rviz_node = ExecuteProcess(
cmd=['rviz2', 'rviz2', '-d', os.path.join(navigation_package_path, 'rviz/navigation_transport.rviz')],
output='screen'
)
bringup_launch = GroupAction(
actions=[
PushRosNamespace(robot_name),
automatic_pick_launch,
TimerAction(
period=10.0, # Delay for enabling other nodes
actions=[navigation_launch],
),
]
)
Entry function for the ROS2 Launch file, defining the content to be launched.
def generate_launch_description():
return LaunchDescription([
OpaqueFunction(function = launch_setup)
])
Creates a
LaunchService, passing the launch content to it for execution.
if __name__ == '__main__':
# Create a LaunchDescription object
ld = generate_launch_description()
ls = LaunchService()
ls.include_launch_description(ld)
ls.run()
8.4.4.2 Python Source Code Analysis
The program source code is located at:
/home/ubuntu/ros2_ws/src/example/example/navigation_transport/navigation_transport.py
The program creates
goal_pub,nav_pub, andmark_pubpublishers to publish pose, navigation targets, and path marker messages respectively. It establishes a subscription to theself.nav_goalnavigation target topic, and creates clients to request services like'/automatic_pick/pick','/automatic_pick/place', and'/automatic_pick/get_parameters'.
self.goal_pub = self.create_publisher(PoseStamped, '/goal_pose', 1)
self.nav_pub = self.create_publisher(PoseStamped, self.nav_goal, 1)
self.mark_pub = self.create_publisher(MarkerArray, 'path_point', 1)
self.create_subscription(PoseStamped, self.nav_goal, self.goal_callback, 1, callback_group=timer_cb_group)
self.create_service(SetPose2D, '~/place', self.start_place_srv_callback)
self.pick_client = self.create_client(Trigger, '/automatic_pick/pick', callback_group=timer_cb_group)
self.place_client = self.create_client(Trigger, '/automatic_pick/place', callback_group=timer_cb_group)
self.pick_client.wait_for_service()
self.place_client.wait_for_service()
self.get_param_client = self.create_client(GetParameters, '/automatic_pick/get_parameters', callback_group=timer_cb_group)
self.get_param_client.wait_for_service()
start_place_srv_callbackis the placement service callback function. Upon receiving a placement target, it constructs a targetPoseStampedand publishes it to the navigation nodeself.nav_pub. It displays a location marker in RVIZ using a random color and theflag.daemesh model to show the placement point, finally returning a Trigger type service response.
def start_place_srv_callback(self, request, response):
self.get_logger().info('start navigaiton place')
markerArray = MarkerArray()
pose = PoseStamped()
pose.header.frame_id = self.map_frame
pose.header.stamp = self.navigator.get_clock().now().to_msg()
data = request.data
q = common.rpy2qua(math.radians(data.roll), math.radians(data.pitch), math.radians(data.yaw))
pose.pose.position.x = data.x
pose.pose.position.y = data.y
pose.pose.orientation = q
# Mark the point with number to display
marker = Marker()
marker.header.frame_id = self.map_frame
marker.type = marker.MESH_RESOURCE
marker.mesh_resource = "package://example/resource/flag.dae"
marker.action = marker.ADD
# Size
marker.scale.x = 0.08
marker.scale.y = 0.08
marker.scale.z = 0.2
# Color
color = list(np.random.choice(range(256), size=3))
marker.color.a = 1.0
marker.color.r = color[0] / 255.0
marker.color.g = color[1] / 255.0
marker.color.b = color[2] / 255.0
# Display time. If not set, it will be kept by default
# Position posture
marker.pose.position.x = pose.pose.position.x
marker.pose.position.y = pose.pose.position.y
marker.pose.orientation = pose.pose.orientation
markerArray.markers.append(marker)
self.mark_pub.publish(markerArray)
self.nav_pub.publish(pose)
response.success = True
response.message = "navigation place"
return response
goal_callbackis the callback executed after subscribing to the target point topic. Its primary function determines whether the current system state is:start/pick_finish/place_finish. Based on the state, it decides whether to execute pick navigation or place navigation by calling Nav2 navigationgoToPose(). It automatically invokes thePickorPlaceservice upon navigation completion.
def goal_callback(self, msg):
# Obtain the navigation point to be published
self.get_logger().info('\033[1;32m%s\033[0m' % str(msg))
get_parameters_request = GetParameters.Request()
get_parameters_request.names = ['status']
status = self.send_request(self.get_param_client, get_parameters_request).values[0].string_value
self.get_logger().info('\033[1;32m%s\033[0m' % status)
if status == 'start' or status == 'place_finish': # In the state of ready to pick
self.pick = True
self.place = False
self.get_logger().info('\033[1;32m%s\033[0m' % 'nav pick')
self.navigator.goToPose(msg)
self.haved_publish_goal = True
elif status == 'pick_finish': # In the state of ready to place
self.pick = False
self.place = True
self.get_logger().info('\033[1;32m%s\033[0m' % 'nav place')
self.navigator.goToPose(msg)
self.haved_publish_goal = True
if self.haved_publish_goal:
i = 0
while not self.navigator.isTaskComplete():
i = i + 1
feedback = self.navigator.getFeedback()
if feedback and i % 5 == 0:
self.get_logger().info(
'Estimated time of arrival: '
+ '{0:.0f}'.format(
Duration.from_msg(feedback.estimated_time_remaining).nanoseconds
/ 1e9
)
+ ' seconds.'
)
# Some navigation timeout to demo cancellation
if Duration.from_msg(feedback.navigation_time) > Duration(seconds=600.0):
self.navigator.cancelTask()
# Some navigation request change to demo preemption
# if Duration.from_msg(feedback.navigation_time) > Duration(seconds=18.0):
# self.goal_pub.publish(self.goal_pose)
# self.get_logger().info('\033[1;32m%s\033[0m' % 'feedback')
# Do something depending on the return code
result = self.navigator.getResult()
if result == TaskResult.SUCCEEDED:
self.get_logger().info('Goal succeeded!')
if self.pick:
res = self.send_request(self.pick_client, Trigger.Request())
if res.success:
self.get_logger().info('start pick')
else:
self.get_logger().info('start pick failed')
else:
res = self.send_request(self.place_client, Trigger.Request())
if res.success:
self.get_logger().info('start place')
else:
self.get_logger().info('start place failed')
self.haved_publish_goal = False
elif result == TaskResult.CANCELED:
self.get_logger().info('Goal was canceled!')
elif result == TaskResult.FAILED:
self.get_logger().info('Goal failed!')
else:
self.get_logger().info('Goal has an invalid return status!')
8.4.5 Deviation Adjustment
If the gripper fails to align properly during picking operations, parameters within the source code can be adjusted to calibrate the deviation. The source file is located at: /home/ubuntu/ros2_ws/src/example/example/navigation_transport/automatic_pick.py.
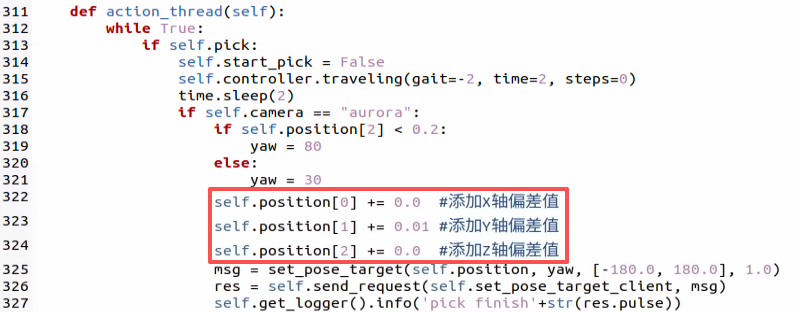
If the robot is equipped with a depth camera, the X, Y, and Z axis offsets can be tuned directly at this location.
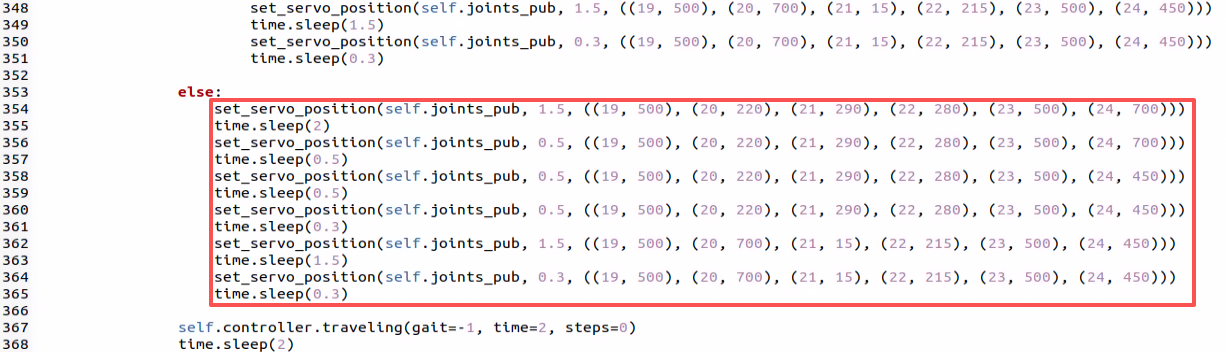
If the robot is equipped with a monocular camera, depth data cannot be acquired. Therefore, the corresponding action group must be modified in these lines to calibrate. It is highly recommended to first load the target action group into the PC software and execute it to verify the adjustments visually.
8.5 3D Vision: Fall Prevention
8.5.1 Experiment Introduction
During navigation, mobile robots may encounter hazards such as downward steps or drop-offs. Without appropriate detection and avoidance mechanisms, the robot risks falling. On flat terrain, depth readings remain within a consistent range and vary smoothly. Conversely, a sudden jump in these distance values indicates a step or drop-off ahead. Therefore, ensuring safety during autonomous navigation is critical. By utilizing a depth camera to acquire depth data, the system can accurately assess the safety of the robot’s forward path.
8.5.2 Operation Steps
Note
Commands are strictly case-sensitive, and the Tab key can be used to auto-complete keywords.
Power on ROSpider and connect it to the remote control software NoMachine. For instructions on connecting to the remote desktop, refer to 1. ROSpider User Manual \1.4 Development Environment Setup.
Click the desktop icon
to open the terminal.Enter the command to stop auto-start services.
~/.stop_ros.sh
Enter the command to launch the fall prevention feature.
ros2 launch example prevent_falling.launch.py
To stop the feature, press Ctrl + C in the command line terminal interface. If the feature does not close immediately, try pressing Ctrl + C a few more times.
8.5.3 Program Outcome
Following the feature launch, the terminal will display the depth camera feed. The robot will move forward autonomously. Upon encountering high or low terrain immediately ahead, the robot will automatically turn in place and assess the flatness of the new forward position. It proceeds forward if flat, or continues to turn in place until flat ground is detected ahead.

Note
Upon initial setup or whenever the robot is relocated, the command ros2 launch example prevent_falling.launch.py debug:=true must be executed to calibrate the current surface and establish a safe baseline. For subsequent operations in the same location, running the file ros2 launch example prevent_falling.launch.py will maintain this calibrated safety state.
8.5.4 Program Analysis
8.5.4.1 Launch File Analysis
This launch file is located at:
/home/ubuntu/ros2_ws/src/example/example/rgbd_example/prevent_falling.launch.py
The program defines the content to launch, acquires paths for the controller, peripherals, and example packages, and launches
depth_camera.launchandcontroller.launch. It creates the ROS2 nodeprevent_falling_node, specifying the executable file, and returns the launch list.
def launch_setup(context):
compiled = os.environ['need_compile']
debug = LaunchConfiguration('debug', default='false')
debug_arg = DeclareLaunchArgument('debug', default_value=debug)
if compiled == 'True':
controller_package_path = get_package_share_directory('controller')
peripherals_package_path = get_package_share_directory('peripherals')
example_package_path = get_package_share_directory('example')
else:
controller_package_path = '/home/ubuntu/ros2_ws/src/driver/controller'
peripherals_package_path = '/home/ubuntu/ros2_ws/src/peripherals'
example_package_path = '/home/ubuntu/ros2_ws/src/example'
depth_camera_launch = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(peripherals_package_path, 'launch/depth_camera.launch.py')),
)
controller_launch = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(controller_package_path, 'launch/controller.launch.py')),
)
prevent_falling_node = Node(
package='example',
executable='prevent_falling',
output='screen',
parameters=[os.path.join(example_package_path, 'config/plane_distance.yaml'), {'debug': debug}]
)
return [debug_arg,
depth_camera_launch,
controller_launch,
prevent_falling_node,
]
Entry function for the ROS2 Launch file, defining launch content.
def generate_launch_description():
return LaunchDescription([
OpaqueFunction(function = launch_setup)
])
Creates a
LaunchServiceto execute the defined launch content.
if __name__ == '__main__':
# Create a LaunchDescription object
ld = generate_launch_description()
ls = LaunchService()
ls.include_launch_description(ld)
ls.run()
8.5.4.2 Python Source Code Analysis
The program source code is located at:
/home/ubuntu/ros2_ws/src/example/example/rgbd_example/include/prevent_falling.py
The program subscribes to the
'/depth_cam/depth/image_raw'topic and initiates a client request to the'/controller_manager/init_finish'service. It createscmd_vel_pubandjoints_pubpublishers for sending servo and chassis control messages, and initializes arm position and robot pose.
self.joints_pub = self.create_publisher(ServosPosition, '/servo_controller', 1) # Servo control
self.cmd_vel_pub = self.create_publisher(Twist, '/controller/cmd_vel', 1) # Chassis control
self.create_subscription(Image, '/depth_cam/depth/image_raw', self.depth_callback, 1)
self.client = self.create_client(Trigger, '/controller_manager/init_finish')
self.client.wait_for_service()
set_servo_position(self.joints_pub, 1, ((19, 500), (20, 700), (21, 85), (22, 150), (23, 500), (24, 700)))
self.controller.set_build_in_pose('DEFAULT_POSE', 1)
time.sleep(1)
threading.Thread(target=self.main, daemon=True).start()
self.create_service(Trigger, '~/init_finish', self.get_node_state)
The
get_roi_distancefunction extracts depth information for a designated Region of Interest (ROI) from the depth image, computing its average depth value.
def get_roi_distance(self, depth_image, roi):
roi_image = depth_image[roi[0]:roi[1], roi[2]:roi[3]]
try:
distance = round(float(np.mean(roi_image[np.logical_and(roi_image>0, roi_image<30000)])/1000), 3)
except:
distance = 0
return distance
The
move_policyfunction governs the robot’s movement decisions for turning or proceeding based on measured depth values for the left, center, and right regions.
def move_policy(self, left_distance, center_distance, right_distance):
if abs(left_distance - self.plane_high) > 0.04 or abs(center_distance - self.plane_high) > 0.04 or abs(right_distance - self.plane_high) > 0.04:
twist = Twist()
twist.angular.z = 0.2
self.turn = True
self.time_stamp = time.time() + 0.3
self.cmd_vel_pub.publish(twist)
else:
if self.turn:
self.current_time_stamp = time.time()
if self.time_stamp < self.current_time_stamp:
self.turn = False
self.cmd_vel_pub.publish(Twist())
self.time_stamp = time.time() + 0.2
else:
self.current_time_stamp = time.time()
if self.time_stamp < self.current_time_stamp:
twist = Twist()
twist.linear.x = 0.05
self.cmd_vel_pub.publish(twist)
Converts the depth image into an applicable format for display, translating processed depth images into color mappings. Three circles are mapped to indicate the left, center, and right ROIs, with circle placement derived from central ROI coordinates. Finally, it calculates the average depth across these three ROIs.
depth_color_map = cv2.applyColorMap(cv2.convertScaleAbs(depth_image, alpha=0.45), cv2.COLORMAP_JET)
cv2.circle(depth_color_map, (int((self.left_roi[2] + self.left_roi[3]) / 2), int((self.left_roi[0] + self.left_roi[1]) / 2)), 10, (0, 0, 0), -1)
cv2.circle(depth_color_map, (int((self.center_roi[2] + self.center_roi[3]) / 2), int((self.center_roi[0] + self.center_roi[1]) / 2)), 10, (0, 0, 0), -1)
cv2.circle(depth_color_map, (int((self.right_roi[2] + self.right_roi[3]) / 2), int((self.right_roi[0] + self.right_roi[1]) / 2)), 10, (0, 0, 0), -1)
left_distance = self.get_roi_distance(depth_image, self.left_roi)
center_distance = self.get_roi_distance(depth_image, self.center_roi)
right_distance = self.get_roi_distance(depth_image, self.right_roi)
self.get_logger().info(str([left_distance, center_distance, right_distance]))
8.6 3D Vision: Bridge Crossing
8.6.1 Experiment Introduction
Crossing a narrow bridge involves multiple technical aspects, primarily balance control and environmental sensing. To maintain stability, precise pose control is required, encompassing exact adjustments to the center of gravity and leg joint angles. This is achieved using robotic dynamic models and control algorithms like PID or fuzzy logic control. Additionally, real-time environmental perception is essential. The system must detect the width, height, and slope of the bridge to execute necessary pose corrections. Ultimately, implementing this functionality demands significant experimental testing and system tuning.
8.6.2 Operation Steps
Note
Commands are strictly case-sensitive, and the Tab key can be used to auto-complete keywords.
Power on ROSpider and connect it to the remote control software NoMachine. For instructions on connecting to the remote desktop, refer to 1. ROSpider User Manual \1.4 Development Environment Setup.
Click the desktop icon
to open the terminal.Enter the command to stop auto-start services.
~/.stop_ros.sh
Enter the command to launch the bridge crossing feature.
ros2 launch example cross_bridge.launch.py
To stop the feature, press Ctrl + C in the command line terminal interface. If the feature does not close immediately, try pressing Ctrl + C a few more times.
8.6.3 Program Outcome
Once the bridge environment is set up, start the program. The robot will dynamically adjust its pose to smoothly navigate the narrow bridge without falling off.
Note
Upon initial setup of the Bridge Crossing feature, or whenever the robot is relocated, the command ros2 launch example cross_bridge.launch.py debug:=true must be executed. This calibrates the bridge environment and establishes a standard detection baseline. For subsequent operations in the exact same location, running ros2 launch example cross_bridge.launch.py will utilize this established baseline.
8.6.4 Program Analysis
8.6.4.1 Launch File Analysis
This launch file is located at:
/home/ubuntu/ros2_ws/src/example/example/rgbd_example/cross_bridge.launch.py
The program defines launch content, retrieves paths for controller, peripherals, and example packages, and launches
depth_camera.launchandcontroller.launch. It creates the ROS2 nodecross_bridge_node, sets the executable file, and returns the launch list.
def launch_setup(context):
compiled = os.environ['need_compile']
debug = LaunchConfiguration('debug', default='false')
debug_arg = DeclareLaunchArgument('debug', default_value=debug)
if compiled == 'True':
controller_package_path = get_package_share_directory('controller')
peripherals_package_path = get_package_share_directory('peripherals')
example_package_path = get_package_share_directory('example')
else:
controller_package_path = '/home/ubuntu/ros2_ws/src/driver/controller'
peripherals_package_path = '/home/ubuntu/ros2_ws/src/peripherals'
example_package_path = '/home/ubuntu/ros2_ws/src/example'
depth_camera_launch = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(peripherals_package_path, 'launch/depth_camera.launch.py')),
)
controller_launch = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(controller_package_path, 'launch/controller.launch.py')),
)
cross_bridge_node = Node(
package='example',
executable='cross_bridge',
output='screen',
parameters=[os.path.join(example_package_path, 'config/bridge_plane_distance.yaml'), {'debug': debug}]
)
return [debug_arg,
depth_camera_launch,
controller_launch,
cross_bridge_node,
]
Entry function for the ROS2 Launch file, defining the content to be launched.
def generate_launch_description():
return LaunchDescription([
OpaqueFunction(function = launch_setup)
])
Creates a
LaunchServiceand passes the launch content to it for execution.
if __name__ == '__main__':
# Create a LaunchDescription object
ld = generate_launch_description()
ls = LaunchService()
ls.include_launch_description(ld)
ls.run()
8.6.4.2 Python Source Code Analysis
The program source code is located at:
/home/ubuntu/ros2_ws/src/example/example/rgbd_example/include/cross_bridge.py
The program subscribes to the
'/depth_cam/depth/image_raw'topic, creates the client to request the'/controller_manager/init_finish'service, establishescmd_vel_pubandjoints_pubpublishers for passing chassis and servo control messages, and initializes robotic arm location and posture.
self.joints_pub = self.create_publisher(ServosPosition, '/servo_controller', 1) # Servo control
self.cmd_vel_pub = self.create_publisher(Twist, '/controller/cmd_vel', 1) # Chassis control
self.cmd_param_pub = self.create_publisher(CmdParam, '/step_controller/cmd_param', 1) # Walking posture control
self.image_sub = self.create_subscription(Image, '/depth_cam/depth/image_raw', self.depth_callback, 1)
self.camera_info_sub = self.create_subscription(CameraInfo, '/depth_cam/rgb/camera_info', self.camera_info_callback, 1)
self.client = self.create_client(Trigger, '/controller_manager/init_finish')
self.client.wait_for_service()
self.controller.set_build_in_pose('DEFAULT_POSE', 1)
set_servo_position(self.joints_pub, 1, ((19, 500), (20, 727), (21, 80), (22, 160), (23, 500), (24, 700)))
The
get_roi_distancefunction assesses specific ROI depth information from the depth image and computes the corresponding average depth.
def get_roi_distance(self, depth_image, roi):
roi_image = depth_image[roi[0]:roi[1], roi[2]:roi[3]]
try:
distance = round(float(np.mean(roi_image[np.logical_and(roi_image > 0, roi_image < 30000)]) / 1000), 3)
except:
distance = 0
return distance
The
move_policyevaluates depth values captured from five locations, including left, forward-left, forward, right, and forward-right, to dictate ensuing actions based on theplane_highbaseline. Actions may involve tweaking posture states between narrow/default posture, altering body elevation, and adjusting linear and angular speeds.
def move_policy(self, left_distance, left_distance_1, center_distance, right_distance, right_distance_1):
if abs(left_distance_1 - self.plane_high) > 0.04 and abs(right_distance_1 - self.plane_high) > 0.04 :
self.twist.linear.x = 0.02
desired_pose = 'NARROW_POSE'
desired_height = 5
else :
self.twist.linear.x = 0.0
desired_pose = 'DEFAULT_POSE'
desired_height = 20
if desired_pose != self.current_pose:
# Only send a command when a pose change is needed
cmd_param = CmdParam()
cmd_param.gait = 1
cmd_param.period = 1.0
cmd_param.pose = desired_pose
cmd_param.height = desired_height
self.cmd_param_pub.publish(cmd_param)
# Update the current pose state
self.current_pose = desired_pose
if abs(left_distance - self.plane_high) > 0.04:
if abs(center_distance - self.plane_high) > 0.04:
self.twist.angular.z = -0.2
else:
self.twist.angular.z = -0.1
elif abs(right_distance - self.plane_high) > 0.04:
if abs(center_distance - self.plane_high) > 0.04:
self.twist.angular.z = 0.2
else:
self.twist.angular.z = 0.1
else:
self.twist.angular.z = 0.0
if abs(left_distance - self.plane_high) > 0.04 and abs(right_distance - self.plane_high) > 0.04 and abs(center_distance - self.plane_high) > 0.04:
self.twist = Twist()
self.cmd_vel_pub.publish(self.twist)
Processes the depth image into an applicable format, transferring processed mappings into colored representations. Five circles mark the regions of interest for left, forward-left, forward, right, and forward-right, which are localized via corresponding ROI focal centers. Finalizes calculating the average depth relative to the five respective ROIs.
left_roi_1 = [self.left_roi_1[0] - 50, self.left_roi_1[1] - 50, self.left_roi_1[2] - 60, self.left_roi_1[3] - 60]
left_roi = [self.left_roi[0] - 50, self.left_roi[1] - 50, self.left_roi[2] - 30, self.left_roi[3] - 30]
center_roi = [self.center_roi[0] - 50, self.center_roi[1] - 50, self.center_roi[2], self.center_roi[3]]
right_roi = [self.right_roi[0] - 50, self.right_roi[1] - 50, self.right_roi[2] + 30, self.right_roi[3] + 30]
right_roi_1 = [self.right_roi_1[0] - 50, self.right_roi_1[1] - 50, self.right_roi_1[2] + 60, self.right_roi_1[3] + 60]
cv2.circle(depth_color_map, (int((left_roi_1[2] + left_roi_1[3]) / 2), int((left_roi_1[0] + left_roi_1[1]) / 2)), 10, (0, 0, 0), -1)
cv2.circle(depth_color_map, (int((left_roi[2] + left_roi[3]) / 2), int((left_roi[0] + left_roi[1]) / 2)), 10, (0, 0, 0), -1)
cv2.circle(depth_color_map, (int((right_roi[2] + right_roi[3]) / 2), int((right_roi[0] + right_roi[1]) / 2)), 10, (0, 0, 0), -1)
cv2.circle(depth_color_map, (int((center_roi[2] + center_roi[3]) / 2), int((center_roi[0] + center_roi[1]) / 2)), 10, (0, 0, 0), -1)
cv2.circle(depth_color_map, (int((right_roi_1[2] + right_roi_1[3]) / 2), int((right_roi_1[0] + right_roi_1[1]) / 2)), 10, (0, 0, 0), -1)
left_distance = self.get_roi_distance(depth_image, left_roi)
center_distance = self.get_roi_distance(depth_image, self.center_roi)
right_distance = self.get_roi_distance(depth_image, right_roi)
left_distance_1 = self.get_roi_distance(depth_image, left_roi_1)
right_distance_1 = self.get_roi_distance(depth_image, right_roi_1)
8.7 3D Vision: Object Grasping
8.7.1 Experiment Introduction
By integrating depth vision and robot control technologies, the system identifies and tracks specific colored objects to execute precise grasping actions. The depth camera acquires RGB and depth data, enabling color-tracking algorithms to localize the target object for robotic arm manipulation. Core features include utilizing the OpenCV library to detect specific colors in the image feed, processing depth information to calculate the object’s exact 3D spatial coordinates, and applying PID controllers to continuously adjust the robotic arm’s trajectory to accurately track and approach the target. Applications include automated production lines for precise pick-and-place tasks, service robotics, and automated material handling.
8.7.2 Operation Steps
Note
Commands are strictly case-sensitive, and the Tab key can be used to auto-complete keywords.
Power on ROSpider and connect it to the remote control software NoMachine. For instructions on connecting to the remote desktop, refer to 1. ROSpider User Manual \1.4 Development Environment Setup.
Click the desktop icon
to open the terminal.Enter the command to stop auto-start services.
~/.stop_ros.sh
Enter the command to launch the 3D vision object grasping feature.
ros2 launch example track_and_grab.launch.py
To stop the feature, press Ctrl + C in the command line terminal interface. If the feature does not close immediately, try pressing Ctrl + C a few more times.
8.7.3 Program Outcome
Once the program is run, objects within the camera frame will be identified. The robotic arm will track and subsequently grasp the targeted object.
8.7.4 Program Analysis
8.7.4.1 Launch File Analysis
This launch file is located at:
/home/ubuntu/ros2_ws/src/example/example/rgbd_example/track_and_grab.launch.py
The program defines the necessary launch components. It retrieves the package paths for the controller, peripherals, and arm_kinematics packages, and includes the
depth_camera.launch,controller.launch, andarm_kinematics_node.launchfiles. It then creates thetrack_and_grab_nodeROS 2 node, specifying its executable. Finally, it returns the complete launch description.
if compiled == 'True':
controller_package_path = get_package_share_directory('controller')
peripherals_package_path = get_package_share_directory('peripherals')
arm_kinematics_package_path = get_package_share_directory('arm_kinematics')
else:
controller_package_path = '/home/ubuntu/ros2_ws/src/driver/controller'
peripherals_package_path = '/home/ubuntu/ros2_ws/src/peripherals'
arm_kinematics_package_path = '/home/ubuntu/ros2_ws/src/driver/arm_kinematics'
depth_camera_launch = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(peripherals_package_path, 'launch/depth_camera.launch.py')),
)
controller_launch = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(controller_package_path, 'launch/controller.launch.py')),
)
arm_kinematics_launch = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(arm_kinematics_package_path, 'launch/arm_kinematics_node.launch.py')),
)
track_and_grab_node = Node(
package='example',
executable='track_and_grab',
output='screen',
parameters=[{'color': color}, {'start': start}]
)
return [start_arg,
color_arg,
depth_camera_launch,
controller_launch,
arm_kinematics_launch,
track_and_grab_node,
]
The entry point function of the ROS 2 launch file, specifying the nodes to be launched.
def generate_launch_description():
return LaunchDescription([
OpaqueFunction(function = launch_setup)
])
Creates a
LaunchServiceinstance, providing it with the launch description for execution.
if __name__ == '__main__':
# Create a LaunchDescription object
ld = generate_launch_description()
ls = LaunchService()
ls.include_launch_description(ld)
ls.run()
8.7.4.2 Python Source Code Analysis
The program source code is located at:
/home/ubuntu/ros2_ws/src/example/example/rgbd_example/include/track_and_grab.py
The
procfunction detects blocks of a specified color within the image feed, defaulting to red. It utilizes a minimum enclosing circle to estimate the center of the recognized object, specifically identifying the leftmost block to extract its position and radius. Subsequently, a PID controller adjusts the pitch and yaw—modifying the robotic arm’s horizontal and vertical angles—to align the camera with the target blob, before returning the required data.
def proc(self, source_image, result_image, color_ranges):
h, w = source_image.shape[:2]
color = color_ranges['lab']['Stereo'][self.target_color]
img = cv2.resize(source_image, (int(w/2), int(h/2)))
img_blur = cv2.GaussianBlur(img, (3, 3), 3) # Gaussian blur
img_lab = cv2.cvtColor(img_blur, cv2.COLOR_RGB2LAB) # Convert to the LAB space
mask = cv2.inRange(img_lab, tuple(color['min']), tuple(color['max'])) # Binarization
# Smooth the edges, remove small patches, and merge adjacent patches
eroded = cv2.erode(mask, cv2.getStructuringElement(cv2.MORPH_RECT, (3, 3)))
dilated = cv2.dilate(eroded, cv2.getStructuringElement(cv2.MORPH_RECT, (3, 3)))
# Find out the contour with the maximal area
contours = cv2.findContours(dilated, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)[-2]
min_c = None
for c in contours:
if math.fabs(cv2.contourArea(c)) < 50:
continue
(center_x, center_y), radius = cv2.minEnclosingCircle(c) # The minimum circumcircle
if min_c is None:
min_c = (c, center_x)
elif center_x < min_c[1]:
if center_x < min_c[1]:
min_c = (c, center_x)
# If there are contours that meet the requirements
if min_c is not None:
(center_x, center_y), radius = cv2.minEnclosingCircle(min_c[0]) # The minimum circumcircle
# Encircle the recognized color block to be tracked
circle_color = common.range_rgb[self.target_color] if self.target_color in common.range_rgb else (0x55, 0x55, 0x55)
cv2.circle(result_image, (int(center_x * 2), int(center_y * 2)), int(radius * 2), circle_color, 2)
center_x = center_x * 2
center_x_1 = center_x / w
if abs(center_x_1 - 0.7) > 0.02: # Stop moving if the difference range is less than a certain value
self.pid_yaw.SetPoint = 0.5 # Our goal is to position the color block at the center of the frame, which is at the halfway point of the entire pixel width of the frame
self.pid_yaw.update(center_x_1)
self.yaw = min(max(self.yaw + self.pid_yaw.output, 0), 1000)
else:
self.pid_yaw.clear() # If it has already reached the center, reset the PID controller
center_y = center_y * 2
center_y_1 = center_y / h
if abs(center_y_1 - 0.7) > 0.02:
self.pid_pitch.SetPoint = 0.5
self.pid_pitch.update(center_y_1)
self.pitch = min(max(self.pitch + self.pid_pitch.output, 100), 720)
else:
self.pid_pitch.clear()
return (result_image, (self.pitch, self.yaw), (center_x, center_y), radius * 2)
else:
return (result_image, None, None, 0)
Synchronously retrieve messages from the three topics:
depth_cam/rgb/image_raw,/depth_cam/depth/image_raw, and/depth_cam/depth/camera_info.
rgb_sub = message_filters.Subscriber(self, Image, '/depth_cam/rgb/image_raw')
depth_sub = message_filters.Subscriber(self, Image, '/depth_cam/depth/image_raw')
info_sub = message_filters.Subscriber(self, CameraInfo, '/depth_cam/depth/camera_info')
The
get_endpointfunction retrieves the pose of the robotic arm’s end-effector. It converts the returned position and quaternion into a 4x4 homogeneous transformation matrix.
def get_endpoint(self):
endpoint = self.send_request(self.get_current_pose_client, GetRobotPose.Request()).pose
self.endpoint = common.xyz_quat_to_mat([endpoint.position.x, endpoint.position.y, endpoint.position.z],
[endpoint.orientation.w, endpoint.orientation.x, endpoint.orientation.y, endpoint.orientation.z])
return self.endpoint
The
mainfunction continuously reads RGB images, depth maps, and camera parameters from the image queue. It performs color target tracking on the acquired images, calculates the target’s 3D spatial coordinates based on its pixel coordinates and depth, and transforms these into the robotic arm’s world coordinate system to execute the pick-and-place task.
def main(self):
while self.running:
try:
ros_rgb_image, ros_depth_image, depth_camera_info = self.image_queue.get(block=True, timeout=1)
# cv2.imshow("111", ros_rgb_image)
except queue.Empty:
if not self.running:
break
else:
continue
try:
rgb_image = np.ndarray(shape=(ros_rgb_image.height, ros_rgb_image.width, 3), dtype=np.uint8, buffer=ros_rgb_image.data)
depth_image = np.ndarray(shape=(ros_depth_image.height, ros_depth_image.width), dtype=np.uint16, buffer=ros_depth_image.data)
result_image = np.copy(rgb_image)
key = cv2.waitKey(1)
h, w = depth_image.shape[:2]
depth = np.copy(depth_image).reshape((-1, ))
depth[depth<=0] = 55555
sim_depth_image = np.clip(depth_image, 0, 2000).astype(np.float64)
sim_depth_image = sim_depth_image / 2000.0 * 255.0
bgr_image = cv2.cvtColor(rgb_image, cv2.COLOR_RGB2BGR)
depth_color_map = cv2.applyColorMap(sim_depth_image.astype(np.uint8), cv2.COLORMAP_JET)
if self.tracker is not None and self.moving == False and time.time() > self.start_stamp and self.start:
result_image, p_y, center, r = self.tracker.proc(bgr_image, result_image, self.lab_data)
if p_y is not None:
set_servo_position(self.joints_pub, 0.02, ((19, int(p_y[1])), (22, int(p_y[0]))))
center_x, center_y = center
if center_x > w:
center_x = w
if center_y > h:
center_y = h
if abs(self.last_pitch_yaw[0] - p_y[0]) < 3 and abs(self.last_pitch_yaw[1] - p_y[1]) < 3:
if time.time() - self.stamp > 2:
self.stamp = time.time()
roi = [int(center_y) - 5, int(center_y) + 5, int(center_x) - 5, int(center_x) + 5]
if roi[0] < 0:
roi[0] = 0
if roi[1] > h:
roi[1] = h
if roi[2] < 0:
roi[2] = 0
if roi[3] > w:
roi[3] = w
roi_distance = depth_image[roi[0]:roi[1], roi[2]:roi[3]]
valid_mask = (roi_distance > 0) & (roi_distance < 10000)
if np.any(valid_mask):
dist = round(float(roi_distance[valid_mask].mean()/1000.0), 3)
# dist += 0.015 # Object radius compensation
dist += 0.015 # Error compensation
K = depth_camera_info.k
self.get_endpoint()
position = depth_pixel_to_camera((center_x, center_y), dist, (K[0], K[4], K[2], K[5]))
position[0] -= 0.01 # The RGB and depth camera TFs have a 1cm offset
pose_end = np.matmul(self.hand2cam_tf_matrix, common.xyz_euler_to_mat(position, (0, 0, 0))) # Relative coordinates of the end-effector after transformation
world_pose = np.matmul(self.endpoint, pose_end) # Transform to the robotic arm's world coordinates
pose_t, pose_R = common.mat_to_xyz_euler(world_pose)
self.stamp = time.time()
self.moving = True
self.get_logger().info('\033[1;32m%s\033[0m' % "stop"+str(pose_t))
threading.Thread(target=self.pick, args=(pose_t,)).start()
else:
txt = "DISTANCE ERROR !!!"
else:
self.stamp = time.time()
dist = depth_image[int(center_y),int(center_x)]
if dist < 100:
txt = "TOO CLOSE !!!"
else:
txt = "Dist: {}mm".format(dist)
cv2.circle(result_image, (int(center_x), int(center_y)), 5, (255, 255, 255), -1)
cv2.circle(depth_color_map, (int(center_x), int(center_y)), 5, (255, 255, 255), -1)
cv2.putText(depth_color_map, txt, (10, 400 - 20), cv2.FONT_HERSHEY_PLAIN, 2.0, (0, 0, 0), 10, cv2.LINE_AA)
cv2.putText(depth_color_map, txt, (10, 400 - 20), cv2.FONT_HERSHEY_PLAIN, 2.0, (255, 255, 255), 2, cv2.LINE_AA)
self.last_pitch_yaw = p_y
else:
self.stamp = time.time()
if self.enable_disp:
result_image = np.concatenate([result_image, depth_color_map, ], axis=1)
cv2.imshow("depth", result_image)
key = cv2.waitKey(1)
if key == ord('q') or key == 27: # Press Q or Esc to exit
self.running = False
except Exception as e:
self.get_logger().info('error1: ' + str(e))
rclpy.shutdown()
8.8 3D Vision: Shape Recognition & Grasping
8.8.1 Experiment Introduction
Object classification is widely utilized in industry, such as for parts sorting on production lines and cargo classification in logistics warehouses. These applications require fast and accurate object recognition and classification to improve production efficiency and automation. In production line parts sorting, robots utilize machine vision and image processing technologies to recognize various types of parts, sorting them into different locations based on predefined classification criteria. This improves production efficiency and precision while reducing manual intervention and error rates.
Furthermore, object classification has numerous other industrial applications, including quality inspection, defect detection, and automated assembly. These applications all require rapid and precise object recognition and classification to ensure process stability and quality. This section simulates industrial object classification, enabling the robot to recognize objects of different shapes and colors within its current environment.
8.8.2 Operation Steps
Note
Commands are strictly case-sensitive, and the Tab key can be used to auto-complete keywords.
Before running this feature, the robot’s overall deviation must be adjusted according to 8.1 Servo Deviation Calibration. Otherwise, the performance of subsequent applications will be negatively affected.
Power on ROSpider and connect it to the remote control software NoMachine. For instructions on connecting to the remote desktop, refer to 1. ROSpider User Manual \1.4 Development Environment Setup.
Click the desktop icon
to open the terminal.Enter the command to stop auto-start services.
~/.stop_ros.sh
Enter the command to launch the 3D vision shape recognition & grasping feature.
ros2 launch example object_classification.launch.py debug:=true
To stop the feature, press Ctrl + C in the command line terminal interface. If the feature does not close immediately, try pressing Ctrl + C a few more times.
8.8.3 Program Outcome
Place target objects, such as cuboids, spheres, and cylinders of various colors, in front of the camera. The system sequentially recognizes and grasps these items based on their proximity to the center of the visual field. Once grasped, each object is placed into a designated location according to its specific category.
8.8.4 Program Analysis
8.8.4.1 Launch File Analysis
This launch file is located at:
/home/ubuntu/ros2_ws/src/example/example/rgbd_example/object_classification.launch.py
This program defines the necessary launch components. It retrieves the package paths for the controller, peripherals, arm_kinematics, and example packages, and includes the depth_camera.launch, controller.launch, and arm_kinematics_node.launch files. It then creates the
object_classification_nodeROS 2 node, specifying its executable. Finally, it returns the complete launch description.
if compiled == 'True':
controller_package_path = get_package_share_directory('controller')
peripherals_package_path = get_package_share_directory('peripherals')
arm_kinematics_package_path = get_package_share_directory('arm_kinematics')
example_package_path = get_package_share_directory('example')
else:
controller_package_path = '/home/ubuntu/ros2_ws/src/driver/controller'
peripherals_package_path = '/home/ubuntu/ros2_ws/src/peripherals'
arm_kinematics_package_path = '/home/ubuntu/ros2_ws/src/driver/arm_kinematics'
example_package_path = '/home/ubuntu/ros2_ws/src/example'
depth_camera_launch = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(peripherals_package_path, 'launch/depth_camera.launch.py')),
)
controller_launch = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(controller_package_path, 'launch/controller.launch.py')),
)
arm_kinematics_launch = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(arm_kinematics_package_path, 'launch/arm_kinematics_node.launch.py')),
)
object_classification_node = Node(
package='example',
executable='object_classification',
output='screen',
parameters=[os.path.join(example_package_path, 'config/object_classification_plane_distance.yaml'), {'category': category, 'start': start, 'debug': debug}]
)
return [start_arg,
debug_arg,
category_arg,
depth_camera_launch,
controller_launch,
arm_kinematics_launch,
object_classification_node,
]
Serves as the entry point function for the ROS 2 launch script, defining the necessary launch components.
def generate_launch_description():
return LaunchDescription([
OpaqueFunction(function = launch_setup)
])
Instantiates a
LaunchServiceand passes the compiled launch description to it for execution.
if __name__ == '__main__':
# Create a LaunchDescription object
ld = generate_launch_description()
ls = LaunchService()
ls.include_launch_description(ld)
ls.run()
8.8.4.2 Python Source Code Analysis
The program source code is located at:
/home/ubuntu/ros2_ws/src/example/example/rgbd_example/include/object_classification.py
The program creates the
joints_pubandbuzzer_pubpublishers to issue servo control messages. Initializes subscriptions to synchronously retrieve messages from three topics:depth_cam/rgb/image_raw,/depth_cam/depth/image_raw, and/depth_cam/depth/camera_info. Creates clients to request multiple services, including/controller_manager/init_finish,/arm_kinematics/set_joint_value_target, and/arm_kinematics/set_pose_target.
self.joints_pub = self.create_publisher(ServosPosition, '/servo_controller', 1)
self.buzzer_pub = self.create_publisher(BuzzerState, '/ros_robot_controller/set_buzzer', 1)
self.create_service(Trigger, '~/start', self.start_srv_callback)
self.create_service(Trigger, '~/stop', self.stop_srv_callback)
self.create_service(SetStringList, '~/set_shape', self.set_shape_srv_callback)
self.create_service(SetStringList, '~/set_color', self.set_color_srv_callback)
rgb_sub = message_filters.Subscriber(self, Image, '/depth_cam/rgb/image_raw')
depth_sub = message_filters.Subscriber(self, Image, '/depth_cam/depth/image_raw')
info_sub = message_filters.Subscriber(self, CameraInfo, '/depth_cam/depth/camera_info')
# Synchronize timestamps, allowing a time discrepancy of up to 0.03 seconds
sync = message_filters.ApproximateTimeSynchronizer([rgb_sub, depth_sub, info_sub], 3, 0.02)
sync.registerCallback(self.multi_callback)
self.client = self.create_client(Trigger, '/controller_manager/init_finish')
self.client.wait_for_service()
timer_cb_group = ReentrantCallbackGroup()
self.set_joint_value_target_client = self.create_client(SetJointValue, '/arm_kinematics/set_joint_value_target', callback_group=timer_cb_group)
self.set_joint_value_target_client.wait_for_service()
self.kinematics_client = self.create_client(SetRobotPose, '/arm_kinematics/set_pose_target')
self.kinematics_client.wait_for_service()
self.controller = ActionGroupController(self.create_publisher(ServosPosition, 'servo_controller', 1), '/home/ubuntu/software/actionset_editor/ActionGroups')
The
init_processfunction cancels any existing timers and stops scheduled tasks. It executes the initialization actionrun_action("init")and restores the default pose. Depending on thestartparameter value, it selects different initialization workflows between shape and color, and processes the relevant messages via service callbacks. A background thread is started to execute the main working logic. A ROS 2 service~/init_finishis created, withself.get_node_stateis assigned as its callback.
def init_process(self):
self.timer.cancel()
self.controller.run_action("init")
self.goto_default()
if self.get_parameter('start').value:
if self.get_parameter('category').value == 'shape':
msg = SetStringList.Request()
msg.data = ['sphere', 'cuboid', 'cylinder']
self.set_shape_srv_callback(msg, SetStringList.Response())
else:
msg = SetStringListi.Request()
msg.data = ['red', 'green', 'blue']
self.set_color_srv_callback(msg, SetStringList.Response())
threading.Thread(target=self.main, daemon=True).start()
self.create_service(Trigger, '~/init_finish', self.get_node_state)
self.get_logger().info('\033[1;32m%s\033[0m' % 'start')
The
goto_defaultfunction sets the target joint positions, utilizingkinematics_control.set_joint_value_target()to define the target values for each robot joint. It sends a request viasend_requestto acquire the robot’s current position and pose information. Theset_servo_positionfunction is called to set the target servo positions, controlling the movement of each robot servo. Finally, thecommon.xyz_quat_to_mat()function converts the robot’s position and pose into a transformation matrix, typically utilized for subsequent calculations or action execution.
def goto_default(self):
msg = kinematics_control.set_joint_value_target([500.0, 470.0, 220.0, 90.0, 500.0])
endpoint = self.send_request(self.set_joint_value_target_client, msg)
pose_t = endpoint.pose.position
pose_r = endpoint.pose.orientation
set_servo_position(self.joints_pub, 1, ((19, 500), (20, 470), (21, 220), (22, 90), (23, 500), (24, 700)))
self.endpoint = common.xyz_quat_to_mat([pose_t.x, pose_t.y, pose_t.z], [pose_r.w, pose_r.x, pose_r.y, pose_r.z])
The
mainfunction retrieves RGB and depth images from the image queue. In debug mode, it records and saves depth data while triggering the buzzer. In normal mode, it processes the depth image, applies color mapping, and performs object recognition and sorting. Based on the recognition results, it controls the robotic arm’s movements. A window displays the synthesized depth and RGB images in real time, drawing the object’s position and shape.
def main(self):
count = 0
while self.running:
try:
ros_rgb_image, ros_depth_image, depth_camera_info = self.image_queue.get(block=True, timeout=1)
except queue.Empty:
if not self.running:
break
else:
continue
try:
rgb_image = np.ndarray(shape=(ros_rgb_image.height, ros_rgb_image.width, 3), dtype=np.uint8, buffer=ros_rgb_image.data)
depth_image = np.ndarray(shape=(ros_depth_image.height, ros_depth_image.width), dtype=np.uint16, buffer=ros_depth_image.data)
depth_image = depth_image.copy()
min_dist = self.get_min_distance(depth_image)
if self.debug:
count += 1
self.get_logger().info(str(min_dist))
if count > 50:
count = 0
data = {'/**': {'ros__parameters': {'plane_distance': {}}}}
data['/**']['ros__parameters']['plane_distance'] = int(min_dist)
common.save_yaml_data(data, os.path.join(
os.path.abspath(os.path.join(os.path.split(os.path.realpath(__file__))[0], '../../..')),
'config/object_classification_plane_distance.yaml'))
msg = BuzzerState()
msg.freq = 1900
msg.on_time = 0.2
msg.off_time = 0.01
msg.repeat = 1
self.buzzer_pub.publish(msg)
self.debug = False
else:
# Limit the pixel values of the depth image within the range of 0 to 350, and normalize the pixel values of the depth image to the range of 0 to 255
sim_depth_image = np.clip(depth_image, 0, 350).astype(np.float64) / 350 * 255
depth_color_map = cv2.applyColorMap(sim_depth_image.astype(np.uint8), cv2.COLORMAP_JET)
if not self.moving:
object_info_list = self.shape_recognition(rgb_image, depth_image, depth_color_map, depth_camera_info.k, min_dist)
if self.start:
reorder_object_info_list = object_info_list
if object_info_list:
if self.last_object_info_list:
# Reorder based on the contrast of the previous object's position
reorder_object_info_list = position_reorder(object_info_list, self.last_object_info_list, 20)
if reorder_object_info_list:
if not self.target_shapes:
if self.shapes is not None:
indices = [i for i, info in enumerate(reorder_object_info_list) if info[0].split('_')[0] in self.shapes]
else:
indices = [i for i, info in enumerate(reorder_object_info_list) if self.color_comparison(info[-2]) in self.colors]
if indices:
min_depth_index = min(indices, key=lambda i: reorder_object_info_list[i][2])
self.target_shapes = reorder_object_info_list[min_depth_index][0].split('_')[0]
else:
target_index = [i for i, info in enumerate(reorder_object_info_list) if info[0].split('_')[0] == self.target_shapes]
if target_index:
target_index = target_index[0]
obejct_info = reorder_object_info_list[target_index]
x, y, w, h, center, width, height = obejct_info[3]
angle = obejct_info[-1]
cv2.putText(depth_color_map, self.target_shapes, (x + w // 2, y + (h // 2) - 10), cv2.FONT_HERSHEY_COMPLEX, 1.0,
(0, 0, 0), 2, cv2.LINE_AA)
cv2.putText(depth_color_map, self.target_shapes, (x + w // 2, y + (h // 2) - 10), cv2.FONT_HERSHEY_COMPLEX, 1.0,
(255, 255, 255), 1)
cv2.drawContours(depth_color_map, [np.int0(cv2.boxPoints((center, (width, height), angle)))], -1,
(0, 0, 255), 2, cv2.LINE_AA)
position = obejct_info[1]
e_distance = round(math.sqrt(pow(self.last_position[0] - position[0], 2)) + math.sqrt(
pow(self.last_position[1] - position[1], 2)), 5)
if e_distance <= 0.005:
self.count += 1
else:
self.count = 0
if self.count > 5:
self.count = 0
self.target_shapes = None
self.moving = True
threading.Thread(target=self.move, args=(obejct_info,)).start()
self.last_position = position
else:
self.target_shapes = None
self.last_object_info_list = reorder_object_info_list
cv2.rectangle(rgb_image, (self.roi[2], self.roi[0]), (self.roi[3], self.roi[1]), (255, 255, 0), 1)
# bgr_image = cv2.cvtColor(rgb_image, cv2.COLOR_RGB2BGR)
self.fps.update()
result_image = np.concatenate([depth_color_map, rgb_image], axis=1)
cv2.imshow("depth", result_image)
key = cv2.waitKey(1)
if key == ord('q') or key == 27: # Press q or esc to exit
self.running = False
except Exception as e:
self.get_logger().info(str(e))
rclpy.shutdown()
8.9 3D Vision: Volume Measurement
8.9.1 Experiment Introduction
This application implements a depth map-based object recognition and volume calculation system. It primarily enables the robotic arm to recognize and classify objects via depth images and calculate their volumes, such as cuboids, spheres, and cylinders. The code framework is based on ROS 2, integrating computer vision and robot control technologies. By combining these technologies, an efficient object recognition and classification system is realized, offering broad application prospects, particularly in automated production lines and warehouse management.
8.9.2 Operation Steps
Note
Commands are strictly case-sensitive, and the Tab key can be used to auto-complete keywords.
Before running this feature, the robot’s overall deviation must be adjusted according to 8.1 Servo Deviation Calibration. Otherwise, the performance of subsequent applications will be negatively affected.
Power on ROSpider and connect it to the remote control software NoMachine. For instructions on connecting to the remote desktop, refer to 1. ROSpider User Manual \1.4 Development Environment Setup.
Click the desktop icon
to open the terminal.Enter the command to stop auto-start services.
~/.stop_ros.sh
Enter the command to launch the 3D vision volume measurement feature.
ros2 launch example object_volume_measurement.launch.py debug:=true
To stop the feature, press Ctrl + C in the command line terminal interface. If the feature does not close immediately, try pressing Ctrl + C a few more times.
8.9.3 Program Outcome
After starting the feature, the robot will recognize objects in the frame and calculate their volumes.
8.9.4 Program Analysis
8.9.4.1 Launch File Analysis
This launch file is located at:
/home/ubuntu/ros2_ws/src/example/example/rgbd_example/object_volume_measurement.launch.py
This script defines the necessary launch components. It retrieves the package paths for the controller, peripherals, and example packages, and includes the depth_camera.launch and controller.launch files. It then creates the
object_volume_measurement_nodeROS 2 node, specifying its executable. Finally, it returns the complete launch description.
if compiled == 'True':
controller_package_path = get_package_share_directory('controller')
peripherals_package_path = get_package_share_directory('peripherals')
example_package_path = get_package_share_directory('example')
else:
controller_package_path = '/home/ubuntu/ros2_ws/src/driver/controller'
peripherals_package_path = '/home/ubuntu/ros2_ws/src/peripherals'
example_package_path = '/home/ubuntu/ros2_ws/src/example'
depth_camera_launch = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(peripherals_package_path, 'launch/depth_camera.launch.py')),
)
controller_launch = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(controller_package_path, 'launch/controller.launch.py')),
)
object_volume_measurement_node = Node(
package='example',
executable='object_volume_measurement',
output='screen',
parameters=[os.path.join(example_package_path, 'config/object_classification_plane_distance.yaml'), {'start': start, 'debug': debug}]
)
return [start_arg,
debug_arg,
category_arg,
depth_camera_launch,
controller_launch,
object_volume_measurement_node,
]
Serves as the entry point function for the ROS 2 launch script, defining the necessary launch components.
def generate_launch_description():
return LaunchDescription([
OpaqueFunction(function = launch_setup)
])
Instantiates a
LaunchServiceand passes the compiled launch description to it for execution.
if __name__ == '__main__':
# Create a LaunchDescription object
ld = generate_launch_description()
ls = LaunchService()
ls.include_launch_description(ld)
ls.run()
8.9.4.2 Python Source Code Analysis
The program source code is located at:
/home/ubuntu/ros2_ws/src/example/example/rgbd_example/include/object_volume_measurement.py
The program creates the
joints_pubandbuzzer_pubpublishers to issue servo control messages. Initializes subscriptions to synchronously retrieve messages from three topics:depth_cam/rgb/image_raw,/depth_cam/depth/image_raw, and/depth_cam/depth/camera_info. Creates clients to request multiple services, including/controller_manager/init_finish,/arm_kinematics/set_joint_value_target, and/arm_kinematics/set_pose_target.
self.joints_pub = self.create_publisher(ServosPosition, '/servo_controller', 1)
self.buzzer_pub = self.create_publisher(BuzzerState, '/ros_robot_controller/set_buzzer', 1)
self.step_controller = step_controller.StepController()
self.create_service(Trigger, '~/start', self.start_srv_callback)
self.create_service(Trigger, '~/stop', self.stop_srv_callback)
self.create_service(SetStringList, '~/set_shape', self.set_shape_srv_callback)
rgb_sub = message_filters.Subscriber(self, Image, '/depth_cam/rgb/image_raw')
depth_sub = message_filters.Subscriber(self, Image, '/depth_cam/depth/image_raw')
info_sub = message_filters.Subscriber(self, CameraInfo, '/depth_cam/depth/camera_info')
# Synchronize timestamps, allowing a time discrepancy of up to 0.03 seconds
sync = message_filters.ApproximateTimeSynchronizer([rgb_sub, depth_sub, info_sub], 3, 0.02)
sync.registerCallback(self.multi_callback)
self.client = self.create_client(Trigger, '/controller_manager/init_finish')
self.client.wait_for_service()
timer_cb_group = ReentrantCallbackGroup()
self.set_joint_value_target_client = self.create_client(SetJointValue, '/arm_kinematics/set_joint_value_target', callback_group=timer_cb_group)
self.set_joint_value_target_client.wait_for_service()
self.kinematics_client = self.create_client(SetRobotPose, '/arm_kinematics/set_pose_target')
self.kinematics_client.wait_for_service()
self.controller = ActionGroupController(self.create_publisher(ServosPosition, 'servo_controller', 1), '/home/ubuntu/software/actionset_editor/ActionGroups')
The
init_processfunction cancels any existing timers and stops scheduled tasks. It executes the initialization action to restore the robot’s default pose. If thestartparameter isTrue, it sets a group of object shapes to spheres, cuboids, or cylinders, and sends requests via service callbacks. A newself.main()thread is started to run the main task, allowing the main program to continue executing. It creates a~/init_finishservice and assigns theself.get_node_statecallback function.
def init_process(self):
self.timer.cancel()
self.controller.run_action("init")
self.goto_default()
if self.get_parameter('start').value:
msg = SetStringList.Request()
msg.data = ['sphere', 'cuboid', 'cylinder']
self.set_shape_srv_callback(msg, SetStringList.Response())
threading.Thread(target=self.main, daemon=True).start()
self.create_service(Trigger, '~/init_finish', self.get_node_state)
self.get_logger().info('\033[1;32m%s\033[0m' % 'start')
The
goto_defaultfunction sets the target joint positions, utilizingkinematics_control.set_joint_value_target()to define the target values for each robot joint. It sends a request viasend_requestto acquire the robot’s current position and pose information. Theset_servo_positionfunction is called to set the target servo positions, controlling the movement of each robot servo. Finally, thecommon.xyz_quat_to_mat()function converts the robot’s position and pose into a transformation matrix, typically utilized for subsequent calculations or action execution.
def goto_default(self):
msg = kinematics_control.set_joint_value_target([500.0, 470.0, 220.0, 90.0, 500.0])
endpoint = self.send_request(self.set_joint_value_target_client, msg)
pose_t = endpoint.pose.position
pose_r = endpoint.pose.orientation
set_servo_position(self.joints_pub, 1, ((19, 500), (20, 470), (21, 220), (22, 90), (23, 500), (24, 700)))
self.endpoint = common.xyz_quat_to_mat([pose_t.x, pose_t.y, pose_t.z], [pose_r.w, pose_r.x, pose_r.y, pose_r.z])
The
mainfunction retrieves RGB and depth images from the image queue for data processing. In debug mode, it records and saves depth data. In normal mode, it processes the depth image, applies color mapping, and performs object recognition. Based on the recognition results, it draws bounding boxes to annotate the target objects and tracks their movement. The depth information and RGB images are displayed on the screen in real time.
def main(self):
count = 0
while self.running:
try:
ros_rgb_image, ros_depth_image, depth_camera_info = self.image_queue.get(block=True, timeout=1)
except queue.Empty:
if not self.running:
break
else:
continue
try:
rgb_image = np.ndarray(shape=(ros_rgb_image.height, ros_rgb_image.width, 3), dtype=np.uint8, buffer=ros_rgb_image.data)
depth_image = np.ndarray(shape=(ros_depth_image.height, ros_depth_image.width), dtype=np.uint16, buffer=ros_depth_image.data)
depth_image = depth_image.copy()
min_dist = self.get_min_distance(depth_image)
if self.debug:
count += 1
self.get_logger().info(str(min_dist))
if count > 50:
count = 0
data = {'/**': {'ros__parameters': {'plane_distance': {}}}}
data['/**']['ros__parameters']['plane_distance'] = int(min_dist)
common.save_yaml_data(data, os.path.join(
os.path.abspath(os.path.join(os.path.split(os.path.realpath(__file__))[0], '../../..')),
'config/object_classification_plane_distance.yaml'))
msg = BuzzerState()
msg.freq = 1900
msg.on_time = 0.2
msg.off_time = 0.01
msg.repeat = 1
self.buzzer_pub.publish(msg)
self.debug = False
else:
# Limit the pixel values of the depth image within the range of 0 to 350, and normalize the pixel values of the depth image to the range of 0 to 255
sim_depth_image = np.clip(depth_image, 0, 350).astype(np.float64) / 350 * 255
depth_color_map = cv2.applyColorMap(sim_depth_image.astype(np.uint8), cv2.COLORMAP_JET)
if not self.moving:
object_info_list = self.shape_recognition(rgb_image, depth_image, depth_color_map, depth_camera_info.k, min_dist)
if self.start:
reorder_object_info_list = object_info_list
if object_info_list:
if self.last_object_info_list:
# Reorder based on the contrast of the previous object's position
reorder_object_info_list = position_reorder(object_info_list, self.last_object_info_list, 20)
if reorder_object_info_list:
if not self.target_shapes:
indices = [i for i, info in enumerate(reorder_object_info_list) if info[0].split('_')[0] in self.shapes]
if indices:
min_depth_index = min(indices, key=lambda i: reorder_object_info_list[i][2])
self.target_shapes = reorder_object_info_list[min_depth_index][0].split('_')[0]
else:
target_index = [i for i, info in enumerate(reorder_object_info_list) if info[0].split('_')[0] == self.target_shapes]
if target_index:
target_index = target_index[0]
obejct_info = reorder_object_info_list[target_index]
x, y, w, h, center, width, height = obejct_info[3]
angle = obejct_info[-1]
# cv2.putText(depth_color_map, self.target_shapes, (x + w // 2, y + (h // 2) - 10), cv2.FONT_HERSHEY_COMPLEX, 1.0,
# (0, 0, 0), 2, cv2.LINE_AA)
# cv2.putText(depth_color_map, self.target_shapes, (x + w // 2, y + (h // 2) - 10), cv2.FONT_HERSHEY_COMPLEX, 1.0,
# (255, 255, 255), 1)
# cv2.drawContours(depth_color_map, [np.int0(cv2.boxPoints((center, (width, height), angle)))], -1,
# (0, 0, 255), 2, cv2.LINE_AA)
position = obejct_info[1]
e_distance = round(math.sqrt(pow(self.last_position[0] - position[0], 2)) + math.sqrt(
pow(self.last_position[1] - position[1], 2)), 5)
if e_distance <= 0.005:
self.count += 1
else:
self.count = 0
if self.count > 5:
self.count = 0
self.target_shapes = None
# self.moving = True
# threading.Thread(target=self.move, args=(obejct_info,)).start()
self.last_position = position
else:
self.target_shapes = None
self.last_object_info_list = reorder_object_info_list
cv2.rectangle(rgb_image, (self.roi[2], self.roi[0]), (self.roi[3], self.roi[1]), (255, 255, 0), 1)
# bgr_image = cv2.cvtColor(rgb_image, cv2.COLOR_RGB2BGR)
self.fps.update()
result_image = np.concatenate([depth_color_map, rgb_image], axis=1)
cv2.imshow("depth", result_image)
key = cv2.waitKey(1)
if key == ord('q') or key == 27: # Press q or esc to exit
self.running = False
except Exception as e:
self.get_logger().info(str(e))
rclpy.shutdown()