5. Mapping & Navigation Course
5.1 Mapping Tutorial
5.1.1 Getting Started with URDF Model
5.1.1.1 URDF Model Introduction
URDF is an XML-based format used to describe the structure of a robot. The purpose of this format is to provide a robot description standard that is as general as possible.
A robot is typically modeled as a structure composed of multiple links and joints. Links can be understood as rigid bodies with mass, and joints can be understood as elements that connect and constrain the relative motion between two links.
When multiple links are connected and constrained through joints, they form a robot motion model. A URDF document describes the relative relationships of these joints and links, along with their inertial properties, geometric features, and collision models.
5.1.1.2 Comparison Between Xacro Model and URDF Model
The URDF model is a relatively simple robot description file. It features a clear structure and is easy to understand. However, when describing more complex robot structures using URDF, the description file can become lengthy and unable to concisely represent the robot model.
The Xacro model is an extended form of the URDF model. They are essentially the same. When using the Xacro format to describe a robot, the description file can be made more concise, enhancing code reusability and alleviating the verbosity problem common in URDF models.
For example, when the legs of a humanoid robot are described, URDF requires each leg to be described individually, whereas Xacro allows a single leg to be described once and reused.
5.1.1.3 Basic URDF Syntax
XML Basic Syntax
Since URDF models are written based on the XML standard, it is necessary to understand the basic structure of XML.
Elements:
Elements are defined with assigned names. The following rules apply when these elements are created:
<element>
</element>
Attributes:
Attributes are included within an element to define its properties and parameters. The following format can be used when an element is defined:
<element attribute_1=”value1” attribute_2=”value2”>
</element>
Comments:
Comments do not affect other attributes or elements. They can be defined using the following syntax:
<! – Comment content –>
Links
In URDF models, links are represented by the <link> tag. They describe the appearance and physical properties of a rigid part of the robot. When defining a link, the following tags are used:
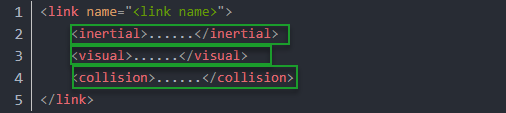
<visual>: Specifies the visual properties of the robot link, such as size, color, and shape.
<inertial>: Specifies the inertial properties of the link, mainly used in the robot’s dynamics calculations.
<collision>: Specifies the collision properties of the link.
Each tag contains corresponding sub-tags with specific functions, as summarized in the table below:
| Tag | Description |
|---|---|
| origin | Describes the pose of the link. It contains two parameters: xyz specifies the link’s position in the simulation map, and rpy specifies the link’s orientation in the simulation map. |
| mess | Defines the mass of the link. |
| inertia | Defines the inertia of the link. Due to the symmetry of the inertia matrix, six parameters—ixx, ixy, ixz, iyy, iyz, and izz—must be provided as attributes. These parameters are obtained through calculation. |
| geometry | Describes the shape of the link. It uses the mesh parameter to load texture files and the filename parameter to specify the file path. There are three sub-tags: box, cylinder, and sphere, representing a rectangular box, a cylinder, and a sphere respectively. |
| material | Defines the material of the link. The name parameter is required. The color sub-tag can be used to adjust the color and transparency. |
Joint
In a URDF model, joints are defined using the joint tag. They describe the kinematic and dynamic properties of the robot’s joints, as well as limits on position and velocity. Based on the type of motion, joints are classified into six types as shown in the table below:
| Type and Description | Tag |
|---|---|
| Rotational joint: Allows unlimited rotation around a single axis | continuous |
| Rotational joint: Similar to continuous but with angular limits | revolute |
| Prismatic joint: Moves along a single axis with positional limits | prismatic |
| Planar joint: Allows translation and rotation within a plane | planar |
| Floating joint: allows both translational and rotational movement | floating |
| Fixed joint: A special joint that does not allow any movement | fixed |
The following tags are used when defining joint actions:
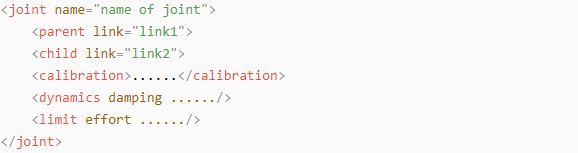
<parent_link>: Defines the parent link.
<child_link>: Defines the child link.
<calibration>: Used to calibrate the joint angle.
<dynamics>: Describes certain physical properties of the motion.
<limit>: Defines the motion limits.
Each tag contains corresponding sub-tags with specific functions, as summarized in the table below:
| Tag | Description |
|---|---|
| origin | Describes the pose of the parent link. It contains two parameters: xyz specifies the link’s position in the simulation map, and rpy specifies the link’s orientation in the simulation map. |
| axis | Defines the rotation of the child link around one of the X, Y, or Z axes of the parent link. |
| limit | Constrains the child link. The lower and upper attributes define the rotation range in radians, the effort attribute limits the force applied during rotation (positive and negative values in newtons, N), and the velocity attribute limits the rotational speed in meters per second (m/s). |
| mimic | Defines the relationship between this joint and other joints. |
| safety_controller | Specifies the safety controller parameters used to protect the robot’s joint movements. |
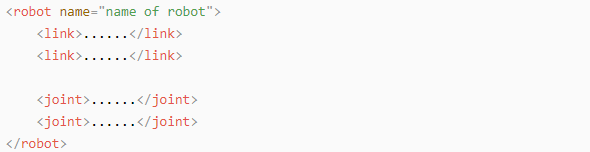
robot tag
The top-level tag for a complete robot. <link> and <joint> tags must be contained within <robot>, formatted as follows:
gazebo tag
Used with the Gazebo simulator to set simulation parameters. This tag allows the inclusion of Gazebo plugins, physical property settings, and more.

Create a simple URDF model
Set the robot model name
At the beginning of a URDF model, set the robot’s name: <robot name=”robot_model_name”>. At the end of the model, enter </robot> to indicate the completion of the robot model.


Sett a Link
(1) Define the first link. Use indentation to indicate that this link belongs to the current model. Set the link name: <link name=”link_name”>. At the end of the link definition, enter </link> to indicate the link is complete.


(2) Define the link’s visual description. Use indentation to indicate that this description belongs to the current link. Start with <visual> and end with </visual>.


(3) <geometry> describes the shape of the link. Close it with </geometry>. Use indentation to indicate that its content provides the detailed description of the link’s shape. The example below describes a link shape: <cylinder length=”0.01” radius=”0.2”/>, where length=”0.01” indicates the link’s length is 0.01 meters, and radius=”0.2” indicates the link’s radius is 0.2 meters, forming a cylinder.

(4) <origin> describes the position of the link. Use indentation to indicate the detailed description of the link’s position. The example below describes a link’s position: <origin rpy=”0 0 0” xyz=”0 0 0”/>, where rpy defines the link’s angles, and xyz defines the link’s coordinates. This indicates that the link is positioned at the origin of the coordinate system.

(5) <material> describes the link’s appearance. Use indentation to indicate the detailed description of the link’s color. Start with <material> and end with </material>. The example below sets the link color to yellow: <color rgba=”1 1 0 1”/>, where rgba=”1 1 0 1” specifies the color values.

Set a Joint
(1) Define the first joint. Use indentation to indicate that this joint belongs to the current model. Set the joint name and type: <joint name=”joint_name” type=”joint_type”>. At the end of the joint definition, enter </joint> to indicate the joint is complete.


(2) Define the joint’s connected links. Use indentation to indicate that this description belongs to the current joint. Set the parent and child parameters. They can be set as follows: <parent link=”parent_link”/>, <child link=”child_link”/>. When the joint rotates, the parent link serves as the pivot, and the child link rotates accordingly.

(3) <origin> describes the joint’s position. Use indentation to indicate the detailed description of the joint’s position. The example below describes a joint position: <origin xyz=”0 0 0.1”/>, where xyz specifies the joint coordinates, indicating that the joint is located at x=0, y=0, z=0.1 in the coordinate system.

(4) <axis> describes the joint’s orientation. Use indentation to indicate the detailed description of the joint’s pose. The example below describes a joint orientation: <axis xyz=”0 0 1”/>, where xyz specifies the joint’s orientation.

(5) <limit> constrains the joint’s movement. Use indentation to indicate the detailed description of the joint’s angular limits. The example below shows a joint limited to a maximum effort of 300 N, an upper rotation limit of 3.14 radians, and a lower rotation limit of -3.14 radians. It is set as follows: effort=”joint effort (N)”, velocity=”joint speed”, lower=”lower rotation limit (rad)”, upper=”upper rotation limit (rad)”.

(6) <dynamics> describes the joint’s dynamics. Use indentation to indicate the detailed description of the joint’s properties. The example below shows a joint’s dynamic parameters: <dynamics damping=”50” friction=”1”/>, where damping=”damping value” and friction=”friction force”.

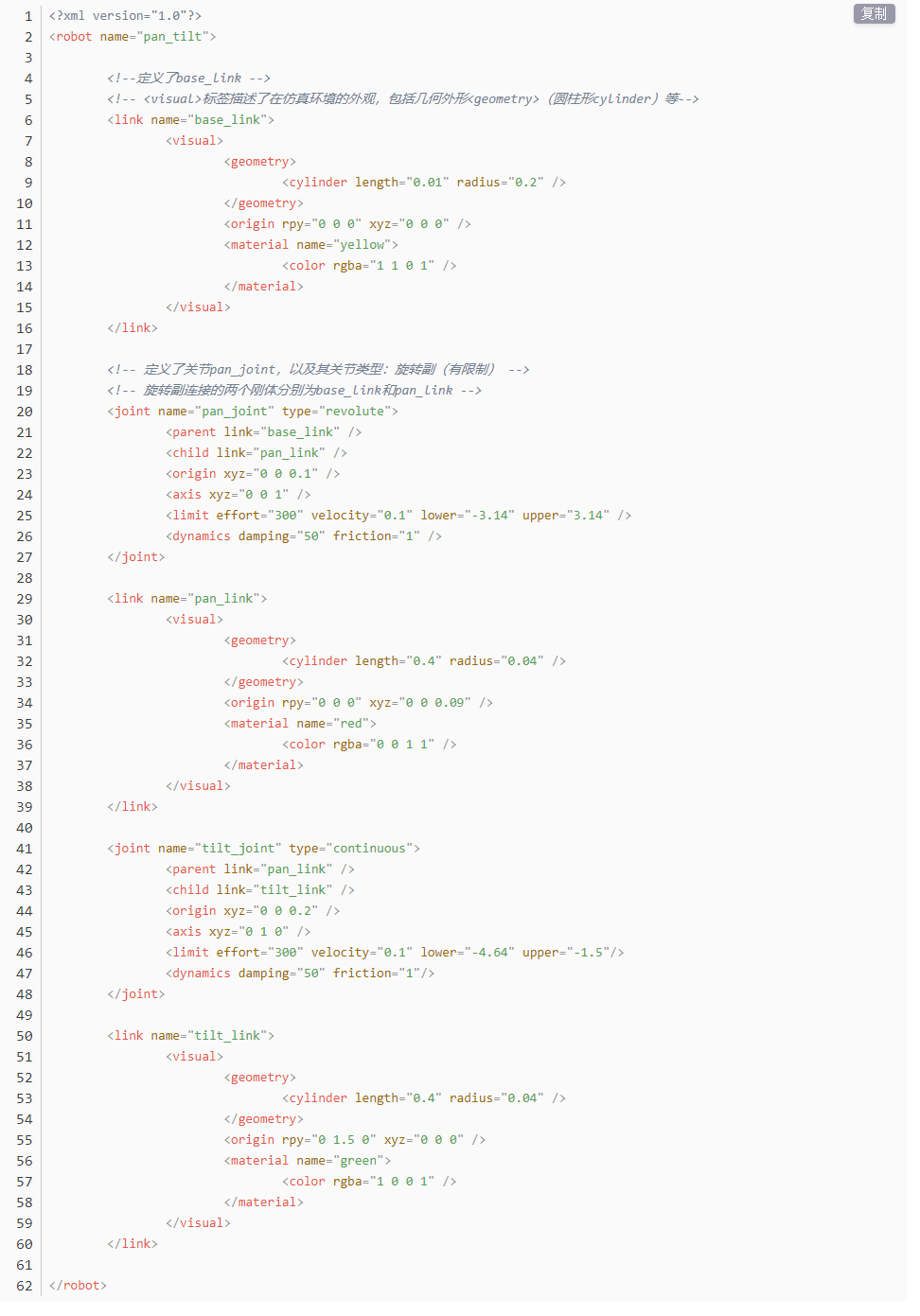
The complete code is as follows:
5.1.2 ROS Robot URDF Model
5.1.2.1 Getting Ready
To understand the URDF model, refer to 5.1.1.3 Basic URDF Syntax.
This section provides a brief analysis of the robot model code and component models. This section provides a brief analysis of the robot model code and component models.
5.1.2.2 Access the Robot Model Code
Start the robot and connect it to the remote control software NoMachine. For connection instructions, refer to 1.7.2 AP Mode Connection Steps.
Click the terminal icon
 in the system desktop to open a new command-line window.
in the system desktop to open a new command-line window.Stop the app auto-start service by entering the following command and press Enter:
sudo systemctl stop start_app_node.service
Enter the command to navigate to the robot simulation model folder.
cd ~/ros2_ws/src/simulations/rosorin_description/urdf
Use the cat command to inspect the robot’s description file:
cat rosorin.xacroThe robot’s relevant descriptions are as follows:
(1) base_link: Base coordinate joint, used to connect various hardware URDF joints on the robot.
(2) lidar_frame: LiDAR joint.
(3) left_front_wheel_link: Left front wheel joint.
(4) left_back_wheel_link: Left rear wheel joint.
(5) right_front_wheel_link: Right front wheel joint.
(6) right_back_wheel_link: Right rear wheel joint.
(7) mic_link: Voice device joint description.
5.1.3 SLAM Map Construction Principle
5.1.3.1 SLAM Introduction
Take humans as an example: before reaching a destination, one needs to know their current position, whether or not a map is available. Humans rely on their eyes, whereas robots rely on LiDAR. SLAM refers to simultaneous localization and mapping.
Localization determines the robot’s pose within a coordinate system. The origin and orientation of the coordinate system can be obtained from the first keyframe, an existing global map or landmarks, or GPS.
Mapping refers to creating a map of the environment perceived by the robot, where the basic geometric elements of the map are points. The primary purpose of the map is for localization and navigation. Navigation can be divided into guiding and moving: guiding includes global and local path planning, while moving refers to controlling the robot’s motion according to the planned path.
5.1.3.2 SLAM Mapping Principle
SLAM mapping mainly involves the following three processes:
Preprocessing: Optimize the raw point cloud data from the LiDAR, remove problematic data, or apply filtering.
Using laser as the signal source, pulses emitted by the LiDAR hit surrounding obstacles, causing scattering.
Part of the reflected light returns to the LiDAR receiver. Using the laser ranging principle, the distance from the LiDAR to the target point can be calculated.
Regarding point clouds: Simply put, the information captured by the LiDAR about the surrounding environment is called the point cloud. It represents the part of the environment that the robot’s “eyes” can see. The captured object information is presented as a series of discrete points with precise angles and distances.
Matching: Match the current local point cloud data to the existing map to find the corresponding position.
Typically, a LiDAR SLAM system compares point clouds captured at different times to calculate the LiDAR’s relative movement and pose change, thereby completing the robot’s localization.
Map fusion: Merge the new data from the LiDAR into the existing map, updating the map continuously.
5.1.3.3 Note on Map Construction
When constructing the map at startup, it is best for the robot to face a straight wall, or use a closed cardboard box instead, so that the LiDAR can capture as many points as possible.
Try to ensure the completeness of the map. For all 360° areas surrounding the robot along its possible paths, the LiDAR needs to scan them to increase map integrity.
When mapping in a large environment, it is recommended that the robot first completes the map’s loop closure, and then scans the smaller details of the environment.
5.1.3.4 Evaluate Map Construction Result
After the map construction is complete, the results can be evaluated using the following items:
Whether the edges of obstacles in the map are clear.
Whether there are areas in the map that are inconsistent with the real environment, such as missing loop closure.
Whether there are gray areas in the robot operational region, such as unscanned areas.
Whether there are obstacles in the map that will not exist during subsequent localization, such as movable obstacles.
Whether the map ensures that at any position within the robot’s operational area, the full 360-degree view has been scanned.
5.1.4 slam_toolbox Mapping Algorithm
5.1.4.1 Algorithm Concept
The Slam Toolbox package combines information from a LiDAR in the form of LaserScan messages and performs TF transformation from odom to the base link to create a 2D spatial map. This package allows full serialization of reloaded SLAM map data and pose graphs for continuous mapping, localization, merging, or other operations. Slam Toolbox can operate in synchronous mode, processing all valid sensor measurements, regardless of lag, and asynchronous mode, processing valid sensor measurements whenever possible.
ROS replaces functionalities of gapping, cartographer, karto, hector, etc., providing a fully-featured SLAM capability built on the powerful scan matcher at the core of Karto, widely used and optimized for this package. The package also introduces a new optimization plugin based on Google Ceres. Additionally, it provides a new localization method called elastic pose-graph localization, which uses a sliding window of measurements added to the pose graph for optimization and refinement. This approach allows the system to track locally changed features in the environment without treating them as errors and to remove redundant nodes when leaving a region, preserving the integrity of the long-term map.
Slam Toolbox is a set of tools for 2D SLAM. Its main functions are as shown below:
Build maps and save map PGM files.
Refine maps, rebuild maps, or continue building on saved maps.
Long-term mapping: continue building on saved maps while removing irrelevant information from new laser point clouds.
Optimize localization mode on existing maps. Run localization mode without mapping using LiDAR odometry mode.
Synchronous and asynchronous mapping.
Dynamic map merging.
Plugin-based optimization solver with a new Google Ceres-based optimization plugin.
Interactive RVIZ plugins.
Provide RVIZ graphical operation tools to manipulate nodes and connections during mapping.
Map serialization and lossless data storage.
KARTO:
Karto_SLAM is based on the concept of graph optimization, using highly optimized and non-iterative Cholesky decomposition to decouple sparse systems as a solution. The graph optimization method represents the map using the mean of the graph, where each node represents a position point in the robot’s trajectory and a set of sensor measurements. Each new node added triggers a computational update.
The ROS version of Karto_SLAM employs Sparse Pose Adjustment (SPA) related to scan matching and loop closure detection. The more landmarks there are, the higher the memory requirement. However, compared to other methods, the graph optimization approach has greater advantages in large environments because it only includes the robot pose in the graph. After obtaining the poses, the map is generated.
The algorithmic framework of Karto_SLAM is as shown below:
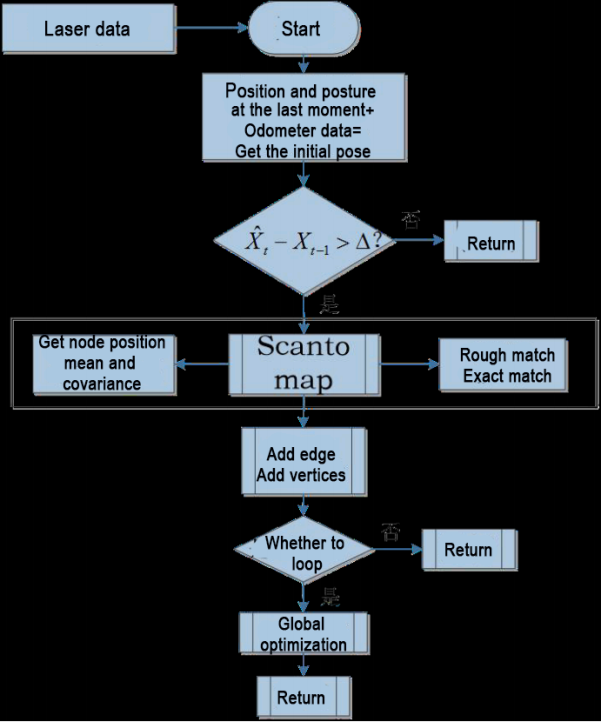
From the figure above, the process is actually quite simple. Following the traditional soft real-time operation mechanism of SLAM, each incoming frame of data is processed immediately and then returned.
KartoSLAM related source code and WIKI address:
KartoSLAM ROS Wiki: http://wiki.ros.org/slam_karto
slam_karto package: https://github.com/ros-perception/slam_karto
open_karto open-source algorithm: https://github.com/ros-perception/open_karto
5.1.4.2 Mapping Steps
Start the robot and connect it to the remote control software NoMachine. For connection instructions, refer to 1.7.2 AP Mode Connection Steps.
Click the terminal icon
in the system desktop to open a new command-line window.Enter the command to disable the app auto-start service.
sudo systemctl stop start_app_node.service
Enter the command to start mapping.
ros2 launch slam slam.launch.py
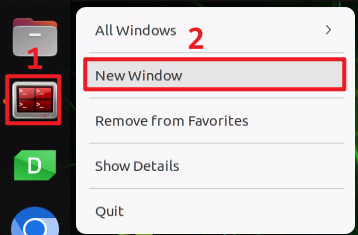
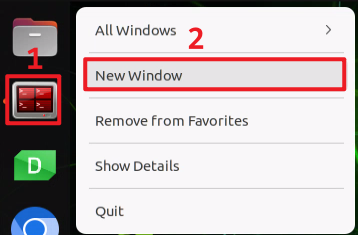
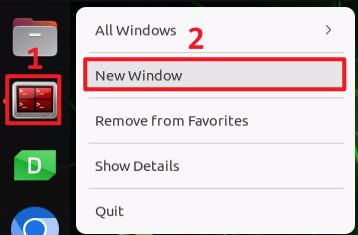
Right-click the system terminal icon and select New Window to open a new terminal window.
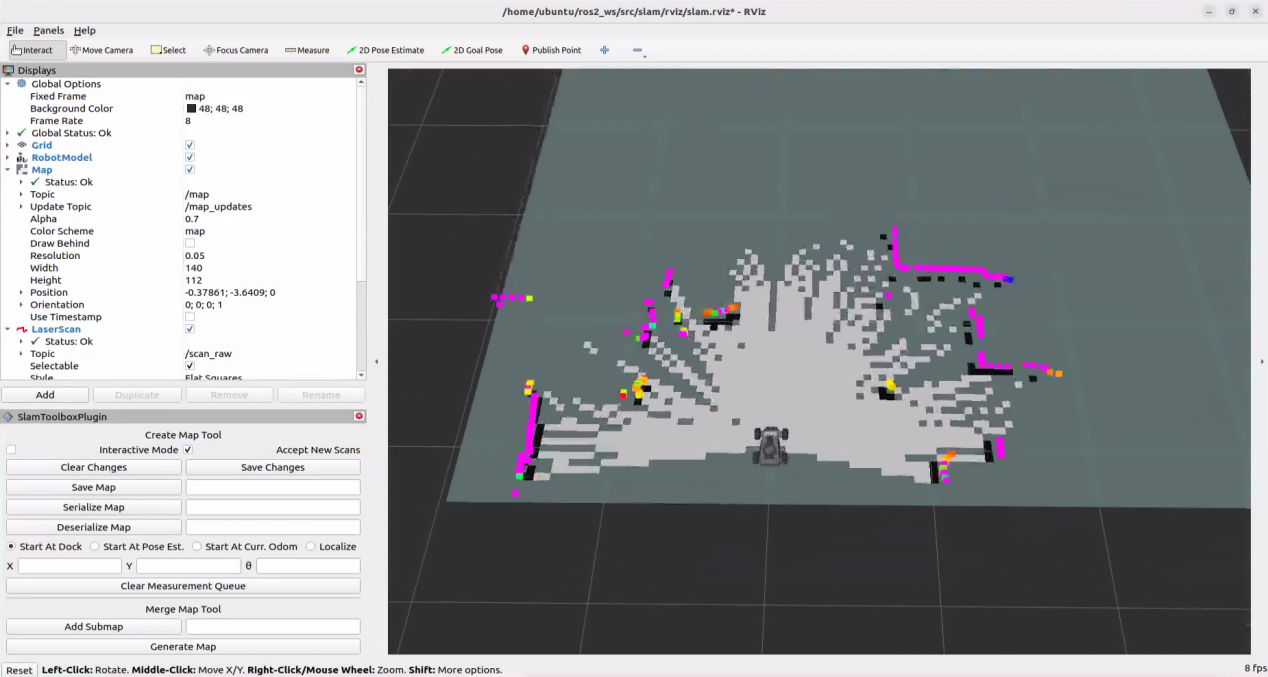
Enter the following command to launch RViz and display the mapping result.
ros2 launch slam rviz_slam.launch.py
Right-click the system terminal icon and select New Window to open a new terminal window.
Next, enter the following command to start the keyboard control node, then press Enter:
ros2 launch peripherals teleop_key_control.launch.py
If the prompt shown below appears, the keyboard control service has started successfully.
Control the robot to move around the current area to build a more complete map. The table below lists the keyboard keys used to control robot movement and their corresponding functions:
| Keyboard Key | Robot Action |
|---|---|
| W | Press once to switch to forward mode and continue moving forward |
| S | Press once to switch to reverse mode and continue moving backward |
| A | Press and hold to interrupt forward or reverse movement and turn left |
| D | Press and hold to interrupt forward or reverse movement and turn right |
5.1.4.3 Save Map
Right-click the system command-line terminal icon and select New Window to open a new command-line terminal.
Enter the command to save the map and press Enter:
cd ~/ros2_ws/src/slam/maps && ros2 run nav2_map_server map_saver_cli -f "map_01" --ros-args -p map_subscribe_transient_local:=true**
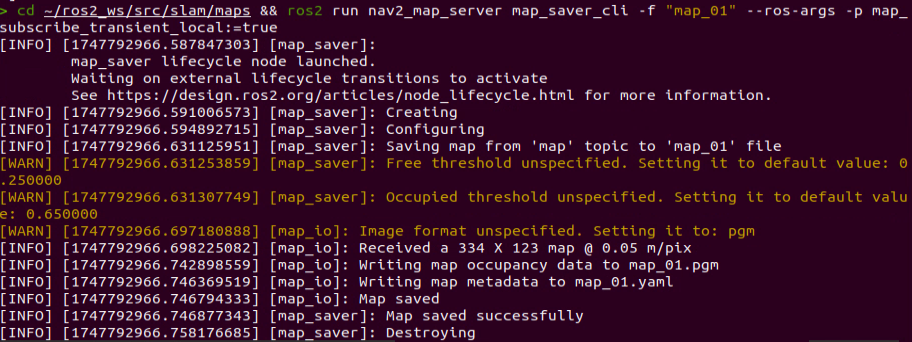
If the prompt shown above appears, the map has been saved successfully.
5.1.4.4 Exit Mapping
Right-click the system command-line terminal icon and select New Window to open another command-line terminal.
Then enter the command and press Enter to execute the program for all ROS nodes in the current system environment. If it does not close successfully, repeat the command as needed.
~/.stop_ros.sh
5.1.4.5 Effect Optimization
To achieve more accurate mapping results, optimize the odometer. The odometer is required for robot mapping, and it depends on the IMU.
The robot is preloaded with calibrated IMU data, which allows it to perform mapping and navigation normally. However, the IMU can still be recalibrated to achieve higher precision. For IMU calibration methods and procedures, refer to section 2.1.1 IMU Calibration of 2. Chassis Motion Control Course.
5.1.4.6 Parameter Description
The parameter file can be found at: ~/ros2_ws/src/slam/config/slam.yaml
For detailed parameter information, refer to the official documentation at: https://wiki.ros.org/slam_toolbox
5.1.4.7 Launch File Analysis
The path of the launch file is:
/home/ubuntu/ros2_ws/src/slam/launch/slam.launch.py
Import Libraries:
The launch library can be referenced in the official ROS documentation for detailed explanations:
https://docs.ros.org/en/humble/How-To-Guides/Launching-composable-nodes.html
import os
from ament_index_python.packages import get_package_share_directory
from launch_ros.actions import PushRosNamespace
from launch import LaunchDescription, LaunchService
from launch.substitutions import LaunchConfiguration
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch.actions import DeclareLaunchArgument, IncludeLaunchDescription, GroupAction, OpaqueFunction, TimerAction
Set Path
Use get_package_share_directory to obtain the path of the slam package.
if compiled == 'True':
slam_package_path = get_package_share_directory('slam')
else:
slam_package_path = '/home/ubuntu/ros2_ws/src/slam'
Launch Other Files
base_launch = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(slam_package_path, 'launch/include/robot.launch.py')),
launch_arguments={
'sim': sim,
'master_name': master_name,
'robot_name': robot_name
}.items(),
)
slam_launch = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(slam_package_path, 'launch/include/slam_base.launch.py')),
launch_arguments={
'use_sim_time': use_sim_time,
'map_frame': map_frame,
'odom_frame': odom_frame,
'base_frame': base_frame,
'scan_topic': f'{frame_prefix}scan_raw', # Using scan_raw topic
'enable_save': enable_save
}.items(),
)
if slam_method == 'slam_toolbox':
bringup_launch = GroupAction(
actions=[
PushRosNamespace(robot_name),
base_launch,
TimerAction(
period=10.0,
actions=[slam_launch],
),
]
)
return [sim_arg, master_name_arg, robot_name_arg, slam_method_arg, bringup_launch]
base_launch: Hardware launch required for the program.
slam_launch: Basic mapping launch.
bringup_launch: Initial pose launch.
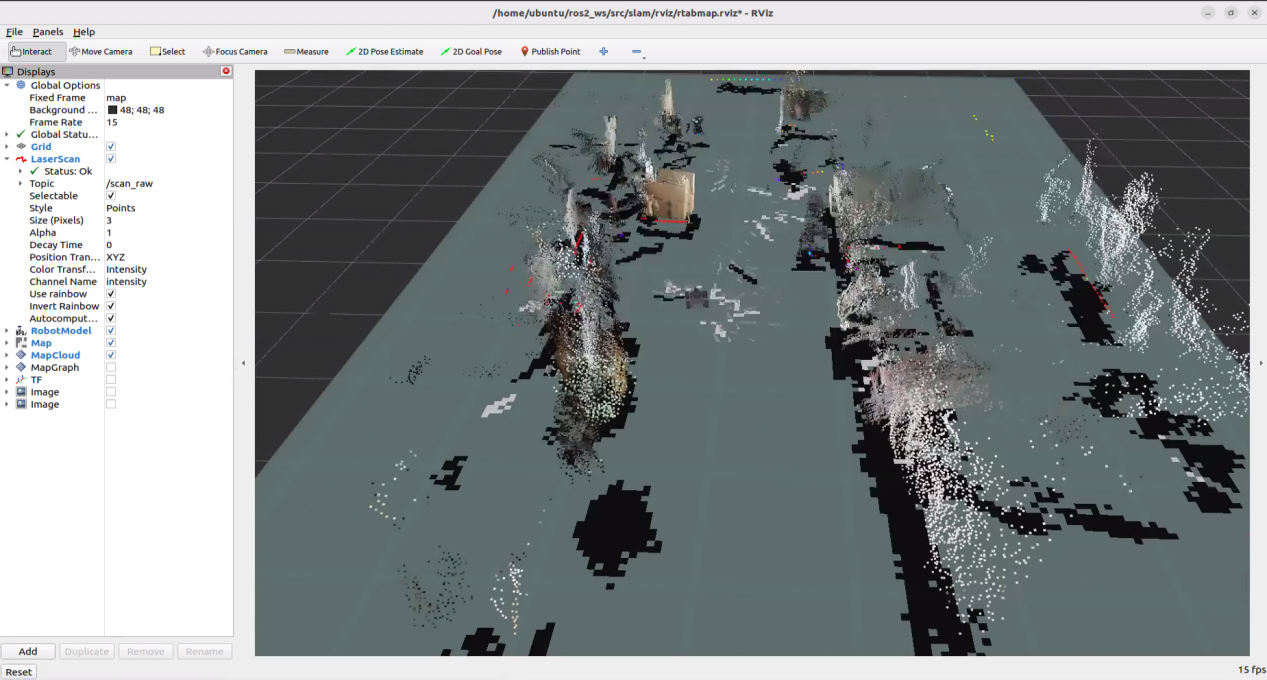
5.1.5 RTAB-VSLAM 3D Mapping
5.1.5.1 RTAB-VSLAM Overview
RTAB-VSLAM is a real-time, appearance-based 3D mapping system. It is an open-source library that implements loop closure detection through memory management methods. By limiting map size, it ensures that loop closure detection is always processed within a fixed time frame, thereby meeting the requirements for long-term and large-scale online mapping.
5.1.5.2 RTAB-VSLAM Working Principle
RTAB-VSLAM 3D mapping uses a feature-based mapping method. Its advantage lies in the abundance of feature points available in most environments, which provides good scene adaptability and enables relocalization based on feature points. However, it also has several drawbacks. Feature point extraction is time-consuming. Feature points use limited information and lose most image details. The method becomes ineffective in weak-texture areas. Feature matching is also prone to mismatches, which can significantly affect the results.
After extracting image features, features from different time frames are matched to form loop closure detection. Once matching is completed, data are categorized into two types — long-term memory data and short-term memory data. Long-term memory data are used for matching future data, while short-term memory data are used for matching temporally continuous data.
During operation, the RTAB-VSLAM algorithm first uses short-term memory data to update pose estimation and mapping. When future data can be matched with long-term memory data, the corresponding long-term memory data are incorporated into short-term memory to further update pose and mapping.
RTAB-VSLAM package link: https://github.com/introlab/rtabmap
5.1.5.3 3D Mapping Steps
Start the robot and connect it to the remote control software NoMachine. For connection instructions, refer to 1.7.2 AP Mode Connection Steps.
Click the terminal icon
in the system desktop to open a ROS2 command-line window. Enter the command to disable the app auto-start service.
sudo systemctl stop start_app_node.service
Entering the following command to start mapping.
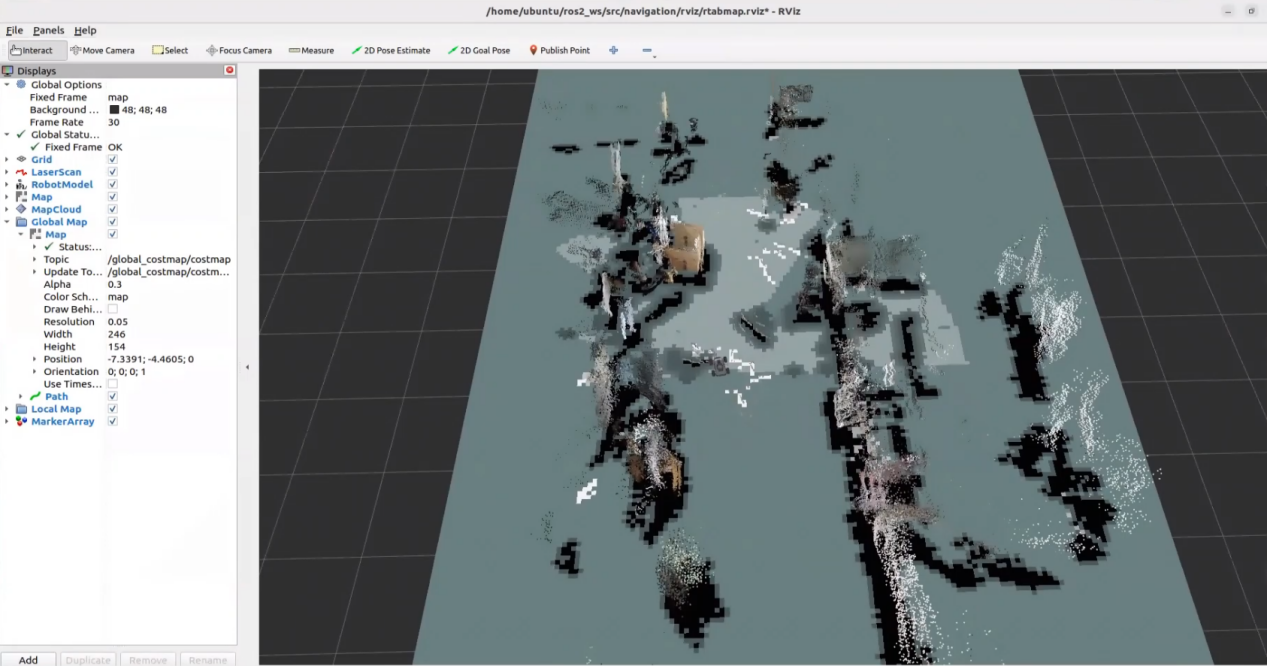
ros2 launch slam rtabmap_slam.launch.py
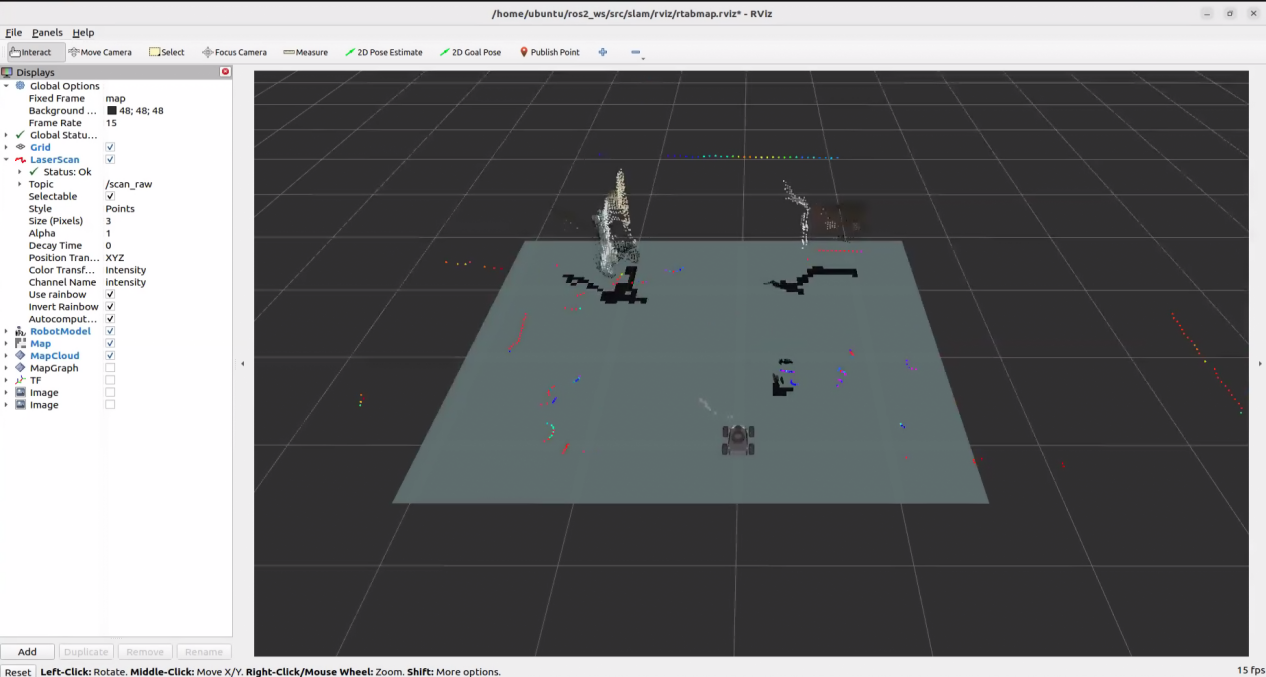
Press Ctrl + Shift + E to open a new command-line terminal, then enter the command to start the RVIZ tool for displaying the mapping process.
ros2 launch slam rviz_rtabmap.launch.py
Press Ctrl + Shift + O to open another command-line terminal, then enter the command to start the keyboard control node and press Enter.
ros2 launch peripherals teleop_key_control.launch.py
If the prompt shown below appears, the keyboard control service has started successfully.
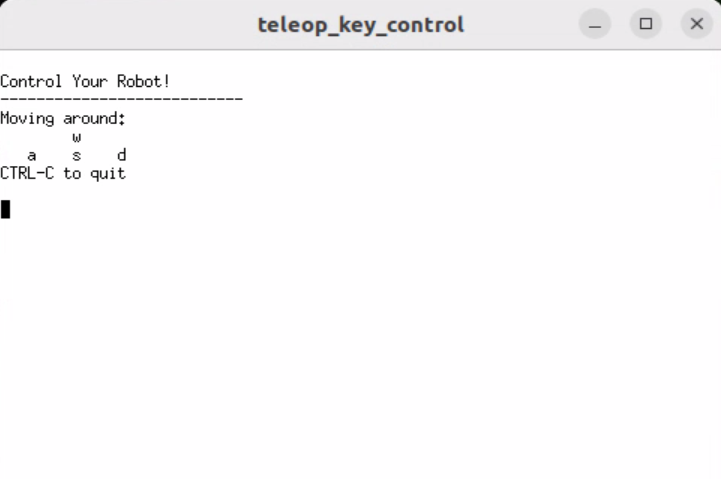
Control the robot to move within the current space to build a more complete map. Table of keyboard keys and the robot action functions.
| Keyboard Key | Robot Action |
|---|---|
| W | Short press to switch to forward mode, keep moving forward. |
| S | Short press to switch to backward mode, keep moving backward. |
| A | Long press to interrupt forward or backward movement and turn left. |
| D | Long press to interrupt forward or backward movement and turn right. |
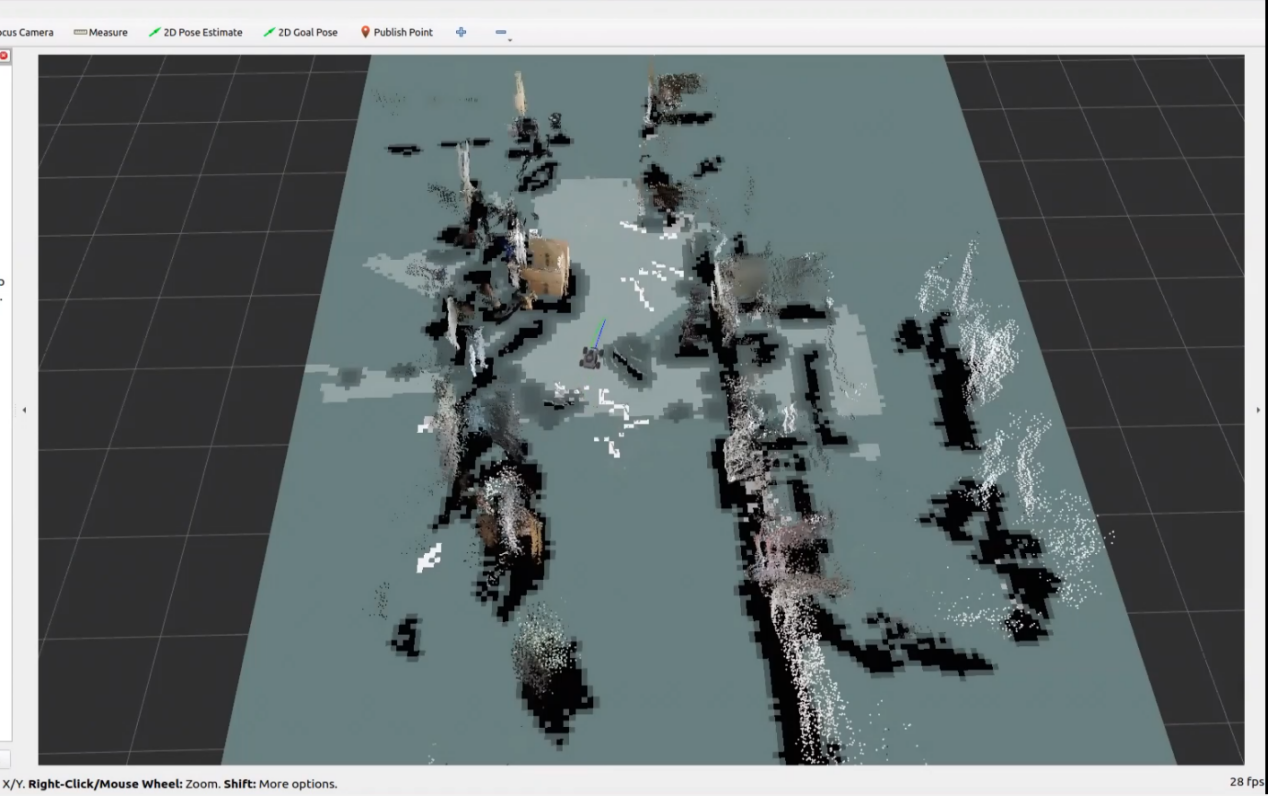
When controlling the robot via keyboard for mapping, it is recommended to reduce the robot’s movement speed appropriately. The lower the movement speed, the smaller the odometry error, resulting in better mapping performance. As the robot moves, the map displayed in RVIZ will continue to expand until the entire environment is fully mapped.
5.1.5.4 Save Map
After completing the mapping, press Ctrl + C in each command-line terminal window to stop the currently running program.
Note
For 3D mapping, manual map saving is not required. When the mapping command is stopped using Ctrl + C, the map is automatically saved.
5.1.5.5 Exit Mapping
Right-click the system command-line terminal icon and select New Window to open a new command-line terminal.
Then enter the command and press Enter to execute the program for all ROS nodes in the current system environment. If it does not close successfully, repeat the command as needed.
~/.stop_ros.sh
5.1.5.6 Launch File Analysis
The path of the launch file is:
/home/ubuntu/ros2_ws/src/slam/launch/rtabmap_slam.launch.py
Import Libraries:
The launch library can be referenced in the official ROS documentation for detailed explanations:
https://docs.ros.org/en/humble/How-To-Guides/Launching-composable-nodes.html
import os
from ament_index_python.packages import get_package_share_directory
from launch_ros.actions import PushRosNamespace
from launch import LaunchDescription
from launch.substitutions import LaunchConfiguration
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch.actions import DeclareLaunchArgument, IncludeLaunchDescription, GroupAction, OpaqueFunction, TimerAction
Set Path
Use get_package_share_directory to obtain the path of the slam package.
if compiled == 'True':
slam_package_path = get_package_share_directory('slam')
else:
slam_package_path = '/home/ubuntu/ros2_ws/src/slam'
Launch Other Files
base_launch = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(slam_package_path, 'launch/include/robot.launch.py')),
launch_arguments={
'sim': sim,
'master_name': master_name,
'robot_name': robot_name,
'action_name': 'horizontal',
}.items(),
)
rtabmap_launch = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(slam_package_path, 'launch/include/rtabmap.launch.py')),
launch_arguments={
'use_sim_time': use_sim_time,
}.items(),
)
bringup_launch = GroupAction(
actions=[
PushRosNamespace(robot_name),
base_launch,
TimerAction(
period=10.0,
actions=[rtabmap_launch],
),
]
)
base_launch: Hardware launch required for the program.
slam_launch: Basic mapping launch.
rtabmap_launch rtab: Mapping launch.
bringup_launch: Initial pose launch.
5.2 Navigation Tutorial
5.2.1 ROS Robot Autonomous Navigation
5.2.1.1 Overview
Autonomous navigation is the method of guiding a device to move from one point to another along a designated route. The main application scenarios of navigation include:
Land applications: such as vehicle autonomous navigation, vehicle tracking and monitoring, intelligent vehicle information systems, Internet of Vehicles (IoV) applications, and railway operation monitoring.
Maritime applications: such as ocean transport, inland river shipping, ship berthing, and docking.
Aviation applications: such as route navigation, airport surface monitoring, and precision approach.
ROS provides a set of general navigation-related packages for robots, allowing developers to focus on higher-level functionalities rather than complex and low-level implementations such as navigation algorithms and hardware interactions. To utilize the navigation functions, simply configure each module’s parameter files according to the robot’s specific parameters. Existing packages can also be redeveloped to meet customized needs, greatly improving development efficiency and reducing product deployment time.
Overall, ROS navigation packages offer stable and comprehensive functions maintained by professional teams, enabling developers to focus on high-level implementation for more efficient development.
5.2.1.2 Package Details
This section provides a detailed explanation of the navigation packages and their parameter usage.
Principle and Framework Overview
The Nav2 project extends the ROS navigation stack, providing a secure framework for enabling robots to move from point A to point B. It supports advanced functions such as dynamic path planning, velocity control, obstacle avoidance, and recovery behaviors.
Nav2 adopts a behavior tree architecture to manage modular action servers. Actions can include path planning, control, recovery, or other navigation-related operations. All of these are implemented as independent nodes that communicate with the behavior tree (BT) through ROS Action servers. The following diagram provides an overview of the Nav2 architecture:
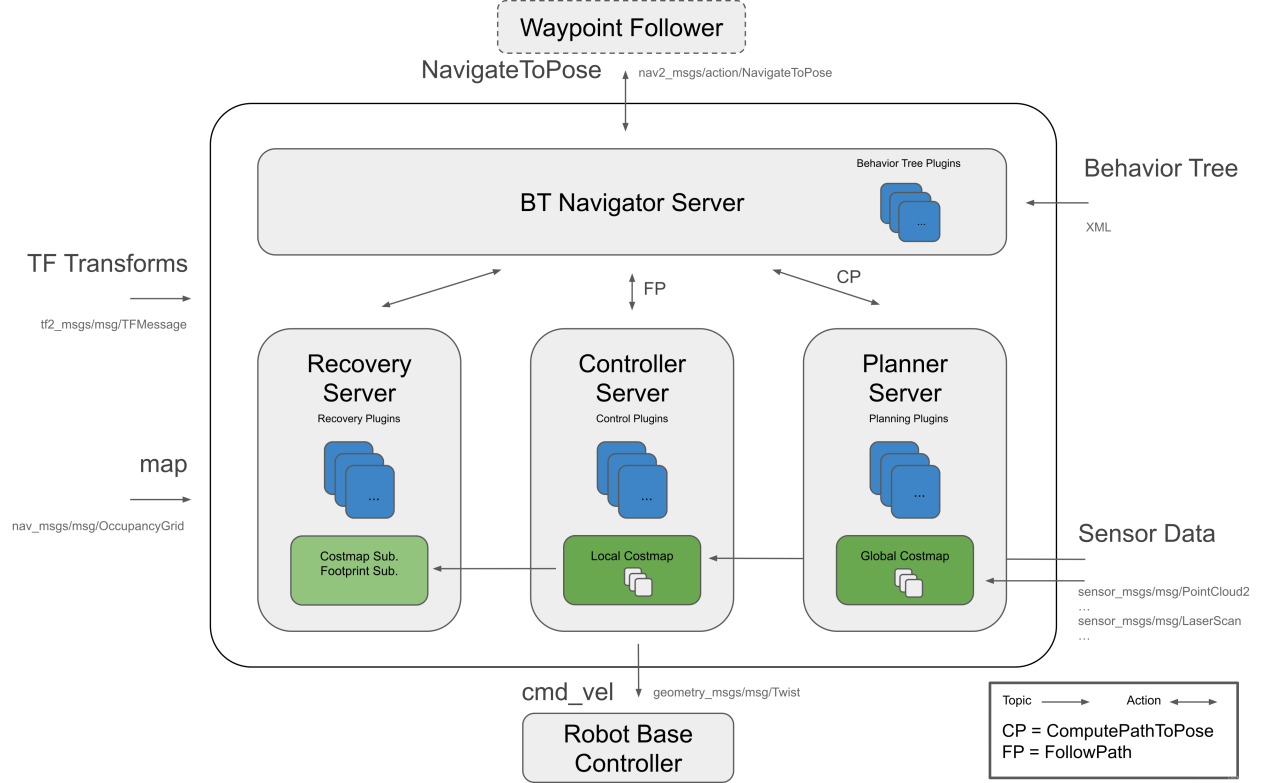
It is composed of one main module and three submodules.
Main Module:
The BT Navigator Server is the navigation behavior tree service, responsible for organizing and coordinating the three subordinate services below.
Three Submodules:
1.Planner Server: The planning server is responsible for computing paths that satisfy defined objective functions. Depending on the selected algorithm, the computed path may also be referred to as a route. Its function is essentially to determine a navigable path on the map.
2.Controller Server: The control server, also known as the local planner in ROS1, executes motion commands to follow the global path or perform local navigation tasks. Its function is to control the robot’s movement along the planned path.
3. Recovery Server: The recovery server serves as the core of the fault-tolerance system. Its purpose is to detect and autonomously handle unexpected situations or system faults. In other words, it enables the robot to recover from unexpected situations, such as navigating out of a pit or obstacle.
Autonomous navigation is achieved by continuously switching between path planning, motion control along the path, and recovery from unexpected situations. During this process, a static SLAM-generated map alone is insufficient, as new obstacles may appear and some previously mapped obstacles may disappear. Therefore, navigation relies on a dynamic map, which is maintained and updated in real time. Based on update frequency and usage, dynamic maps can be classified into the following two types:
Global Costmap:
The global costmap is primarily used by the global planner, as shown in the Planner Server of the architecture diagram.
It typically includes the following layers:
Static Map Layer: A static map, usually generated by SLAM.
Obstacle Map Layer: Records obstacles detected dynamically by sensors.
Inflation Layer: Expands obstacles from the previous layers outward to prevent the robot’s body from colliding with them.
Local Costmap:
The local costmap is primarily used by the local planner, as shown in the Controller Server of the architecture diagram.
It typically includes the following layers:
Obstacle Map Layer: Records obstacles detected dynamically by sensors.
Inflation Layer: Expands obstacles from the obstacle map outward to prevent the robot’s body from colliding with them.
Package Installation
The navigation system uses navigation goals, localization data, and map information as inputs to generate control commands for the robot. First, the robot’s current position must be determined, followed by its target destination.
There are two methods to install the navigation packages. The first method is direct installation via apt-get, using the following command:
sudo apt install ros-*-navigation2
sudo apt install ros-*-nav2-bringup
Note
The asterisk (*) represents the ROS2 version, which can be checked by entering a command in the terminal.
echo $ROS_DISTRO

The second method is to download the package source code and compile it manually. For learning purposes, binary installation is recommended for convenience and speed. If package code modification is required for algorithm improvement, manual installation from source is required. Refer to the video tutorial for detailed instructions.
Navigation package wiki: https://wiki.ros.org/Robots/Nav2
Note
The robot comes with the navigation package preinstalled. No additional installation is required.
5.2.2 Adaptive Monte Carlo Localization(AMCL)
5.2.2.1 AMCL Localization
Localization estimates the robot’s position within the global map. While SLAM also includes localization algorithms, SLAM localization is used for global map construction and occurs before navigation begins. In navigation, localization allows the robot to follow a planned route and verify that its actual trajectory aligns with expectations. The ROS navigation package ros-navigation provides the AMCL localization system for real-time robot positioning during navigation.
AMCL is a probabilistic localization system for 2D mobile robots. It implements the adaptive Monte Carlo localization method, using a particle filter with an existing map to estimate the robot’s position.
Localization addresses the relationship between the robot and surrounding obstacles, as path planning fundamentally relies on obstacle information to make navigation decisions. In an ideal scenario, knowing the robot global position and using sensors such as LiDAR for real-time obstacle detection would be enough for navigation. However, the real-time performance and accuracy of global localization are generally limited. Local localization, using sensors such as odometry and IMU, provides better precision and ensures that the robot motion trajectory aligns with the IMU real-time accuracy. The AMCL node in the navigation package provides global localization by publishing map_odom. Global localization through AMCL is not mandatory. It can be replaced with other systems that provide map_odom, such as SLAM, UWB, or QR-code-based localization.
Global and local localization together establish a dynamic tf coordinate system (map → odom → base_footprint), while static tf coordinates between the robot’s sensors are provided through the robot’s URDF model. This TF relationship resolves the spatial association between the robot and obstacles. For example, if the LiDAR detects an obstacle 3 meters ahead, the transformation between the base_link and laser_link allows determining the relationship between the obstacle and the robot’s chassis.
5.2.2.2 Particle Filtering
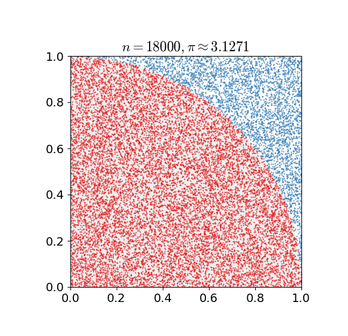
The Monte Carlo localization process simulates particle updates for a one-dimensional robot. First, a set of particles is randomly generated with position, orientation, or other state variables to be estimated. Each particle is assigned a weight that represents how closely it matches the actual system state. Next, the state of each particle is predicted for the next time step. This prediction moves the particles based on the expected behavior of the real system. Next, the particles’ weights are updated based on measurements. Particles that match better with the measurements are given higher weights. Then resampling is performed, discarding unlikely particles and replacing them with more probable ones. Finally the weighted average and covariance of the particle set are calculated to obtain the state estimate.
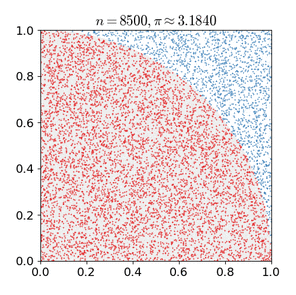
The Monte Carlo method varies, but generally follows a specific pattern:
Define the domain of possible inputs.
Randomly generate inputs based on the probability distribution over the domain.
Perform deterministic calculations on the inputs.
Summarize the results.
There are two important considerations:
(1) If the points are not uniformly distributed, the approximation will be poor.
(2) The process requires many points. If only a few points are randomly placed across the entire square, the approximation will generally be inaccurate. On average, as more points are added, the accuracy of the approximation improves.
The Monte Carlo particle filter algorithm has many applications across a wide range of fields, including physical sciences, engineering, climatology, and computational biology.
5.2.2.3 Adaptive Monte Carlo Localization (AMCL)
AMCL can be considered an improved version of the Monte Carlo localization algorithm. It reduces execution time by using fewer samples in the algorithm, thereby enhancing real-time performance. AMCL implements the adaptive or KLD (Kullback-Leibler Divergence) sampling-based Monte Carlo localization method. It uses particle filtering to track the robot’s pose with an existing map.
The AMCL node primarily uses laser scans and LiDAR maps to pass messages and compute pose estimates. The implementation process begins by initializing the particle filter for the adaptive Monte Carlo localization algorithm using various parameters provided by the ROS system. If no initial pose is set, the algorithm assumes the robot starts at the origin of the coordinate system, which can make the calculation more complex.
Therefore, it is recommended to set the initial pose using the 2D Pose Estimate button in RViz. For more details on AMCL, refer to the wiki: https://github.com/ros-planning/navigation
5.2.2.4 Costmap
Whether it is a 2D or 3D SLAM map generated by LiDAR or depth cameras, it cannot be used directly for navigation. The map must be converted into a costmap for practical navigation. ROS costmaps typically use a grid format. In a grid map, each cell occupies one byte, 8 bits, with values ranging from 0 to 255. For navigation purposes, only three values are needed for each cell:
Occupied: The space is occupied. Obstacle detected.
Free: The space is free. No obstacle.
Unknown: The space is unknown.
Before introducing costmap_2d, the Bresenham algorithm must be explained first. The Bresenham line algorithm is used to draw a straight line between two points. It calculates the closest points along a line segment on an n-dimensional raster. This algorithm only requires fast integer addition, subtraction, and bit-shifting, so it is commonly used for drawing lines in computer graphics. It was one of the first algorithms developed in computer graphics.
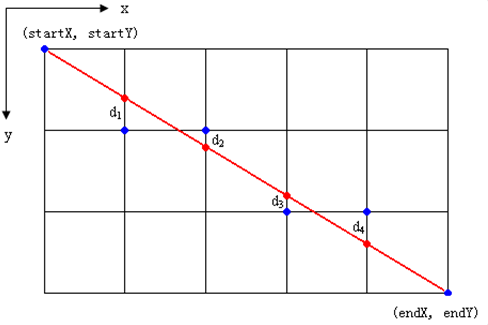
The algorithm constructs a virtual grid of lines through the pixel centers of each row and column, as shown in the diagram above. It calculates the intersection points of the line with each vertical grid line, and based on the error term’s sign, determines the pixel closest to this intersection in each column.
Core Idea of the Algorithm: Assume that k=dy/dx Since the starting point of the line is at the pixel center, the initial error term d0=0.
For each increment of X, the value of d increases according to the slope k, so d=d+k. Once d≥1, subtract 1 to keep d between 0 and 1. When d≥0.5, the pixel closest to the current position is (x+1,y+1). When d<0.5, the closer pixel is (x+1,y). For easier calculation, let e=d−0.5, with an initial value of e=−0.5 and an increment of k. When e≥0, select the pixel at (x+1,y+1). When e<0, select the pixel at (x+1,y). To avoid division, integers are used instead of floating-point values. Since the algorithm only uses the sign of the error term, it can be replaced with e1 = 2*e*dx.
The Costmap2D class maintains the cost value for each grid. The Layer class is a virtual base class that standardizes the interface for the various plugin costmap layers. The key interface functions include:
The initialize function calls the onInitialize function to initialize each costmap layer individually.
The matchSize function, found in the StaticLayer and ObstacleLayer classes, calls the matchSize function of the CostmapLayer class to initialize each costmap layer’s size, resolution, origin, and default cost value, ensuring consistency with the layered_costmap. For the InflationLayer class, a cost table is calculated based on the inflation radius, with cost values changing according to distance. This allows for querying the inflated grid’s cost based on distance. Additionally, a seen_ array is defined to track whether a grid cell has been visited. For the VoxelLayer class, the size of the voxel grid is initialized.
The updateBounds function adjusts the size range that needs to be updated for the current costmap layer. For the StaticLayer class, the update range of the costmap is determined by the size of the static map. Note that the static layer is typically only used in the global costmap. For the ObstacleLayer class, the function iterates over the sensor data in clearing_observations to determine the boundaries of obstacles.
The initialize and matchSize functions are each executed only once. The updateBounds and updateCosts functions are executed periodically, with the frequency of execution determined by the map_update_frequency parameter.
The CostmapLayer class inherits from both the Layer and Costmap2D classes, providing several methods to update the cost values. Both the StaticLayer and ObstacleLayer classes need to store the cost values of the instantiated costmap layers, so they inherit from the CostmapLayer class. The StaticLayer class uses static grid map data to update its costmap. The ObstacleLayer class uses sensor data to update its costmap. The VoxelLayer class, compared to ObstacleLayer, also considers data along the z-axis. The main difference in functionality lies in how obstacles are cleared. The ObstacleLayer clears obstacles in 2D, while the VoxelLayer clears obstacles in 3D.
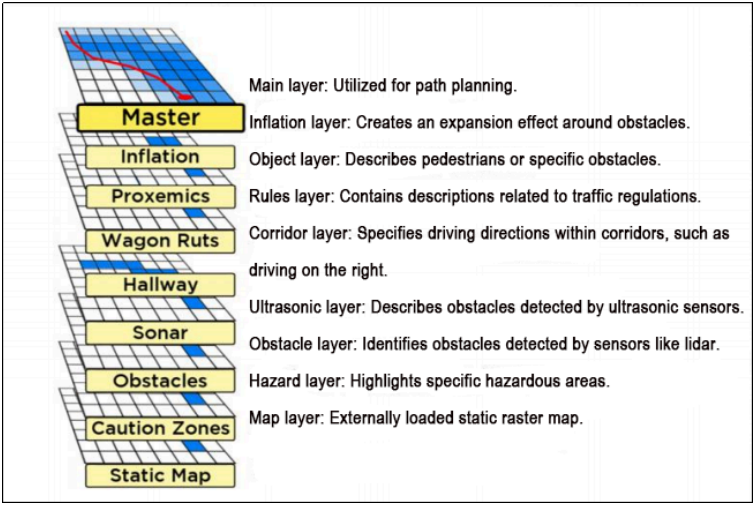
Costmap provides flexible obstacle measurement, allowing specific layers to be created based on requirements to maintain relevant obstacle information. If the robot is equipped only with a LiDAR, an Obstacles layer can be created to store the obstacle data from LiDAR scans. If the robot is also equipped with ultrasonic sensors, a new Sonar layer should be created to manage obstacle data from the sonar sensors. Each layer can have its own set of obstacle update rules, such as adding or removing obstacles, or updating the confidence of detected obstacles. This greatly enhances the scalability of the navigation system.
5.2.2.5 Global Path Planning
Path planning can be categorized based on the robot’s understanding of the environment, the nature of the environment, and the algorithms used. These categories include environment-based path planning algorithms, map-based path planning algorithms, and completeness-based path planning algorithms.
Commonly used path planning algorithms in autonomous robot navigation include Dijkstra, A*, D*, PRM, RRT, Genetic Algorithms, Ant Colony Optimization, and Fuzzy Logic Algorithms.
Among these, Dijkstra and A* are graph-based path search algorithms. The navigation package integrates global path planning plugins such as navfn, global planner, and carrot planner. Users can select one of these plugins and load it into move_base for use. Alternatively, third-party global path planning plugins, such as SBPL_Lattice_Planner and srl_global_planner, can be loaded into move_base. Additionally, users can develop custom global path planning plugins by adhering to the nav_core interface specifications.
Autonomous robot navigation relies on path planning to guide the robot to its target point. The navigation planning layer can be divided into several components: global path planning, local path planning, and behavior execution layers.
Global Path Planning Layer: This layer generates a global path from the starting point to the target position, based on the provided goal and the weighted map information. The global path serves as a reference for the local path planning.
Local Path Planning Layer: This layer generates a local weighted map based on the information from the global path. It then performs local path planning, taking into account nearby obstacles.
Behavior Execution Layer: This layer integrates the commands from the higher layers with the path planning output to determine the robot’s current behavior.
As a key area of research in mobile robotics, the quality of path planning algorithms significantly impacts the robot’s operational efficiency.
Dijkstra Algorithm
The Dijkstra algorithm is a classic shortest path algorithm. It is a single-source shortest path algorithm, primarily characterized by its breadth-first search approach. Starting from the source point, it expands outward layer by layer until reaching the destination. It is a breadth-first algorithm with edge weight consideration, making it one of the most commonly used algorithms for global path planning.
How Dijkstra Algorithm Works:
Initialize dis[start] to 0 and all other points to inf at the beginning.
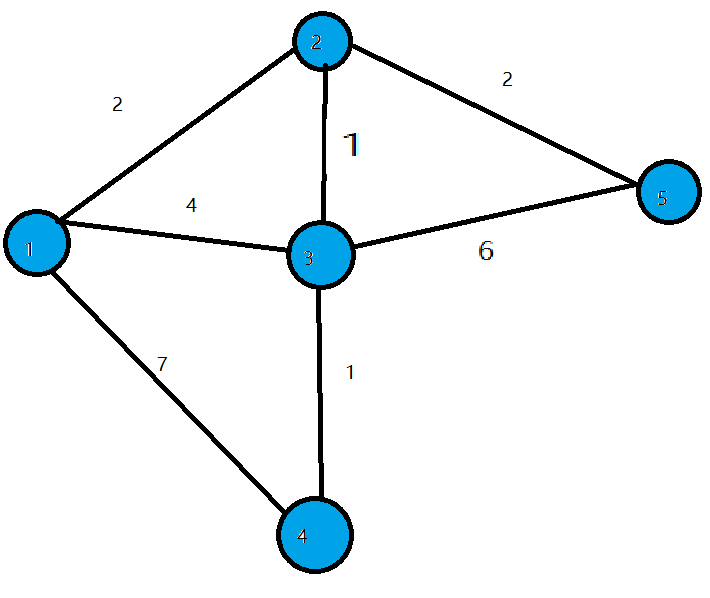
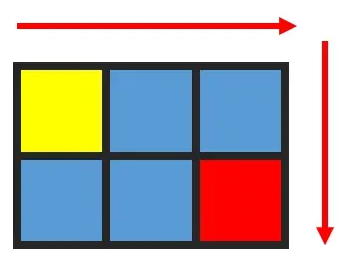
In the first iteration, find the point with the smallest dis value, which is 1. Change point 1 to a white point and update the dis values of all blue points connected to 1. Set dis[2] = 2, dis[3] = 4, dis[4] = 7.
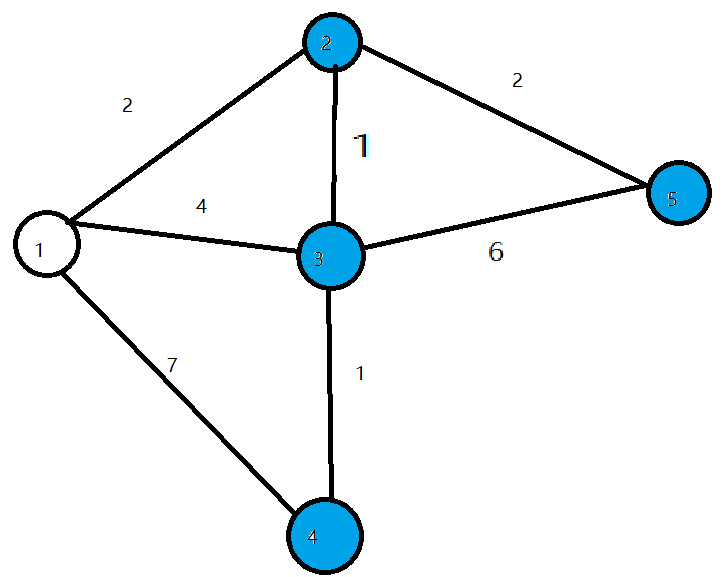
In the second iteration, find the point with the smallest dis value, which is 2. Change point 2 to a white point and update the dis values of all blue points connected to 2. Set dis[3] = 3, dis[5] = 4.
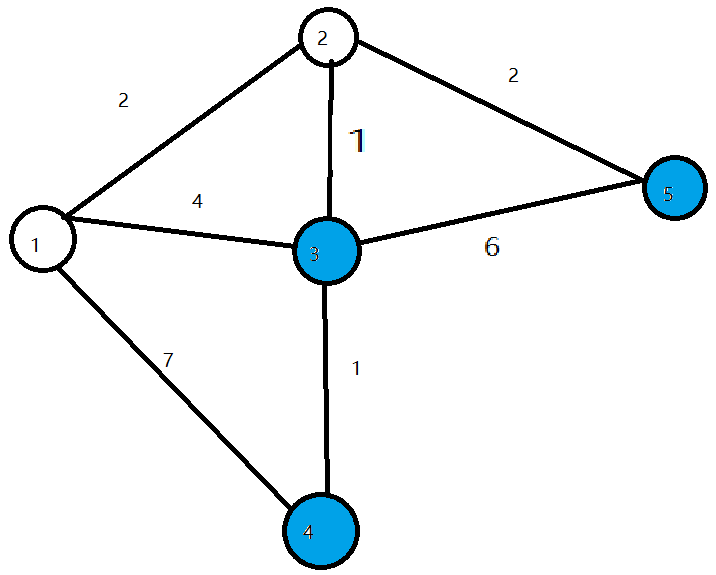
In the third iteration, find the point with the smallest dis value, which is 3. Change point 3 to a white point and update the dis values of all blue points connected to 3. Set dis[4] = 4.
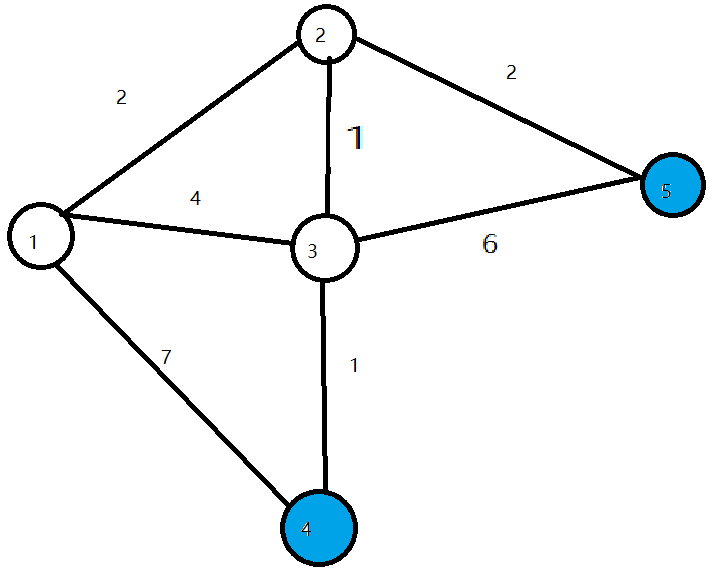
In the next two iterations, change points 4 and 5 to white, then finish the algorithm. The shortest path for all points is calculated.
For an introduction and usage of the Dijkstra algorithm, visit the wiki at the following link: http://wiki.ros.org/navfn
A* Algorithm
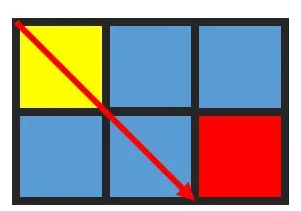
A* is a modification of the Dijkstra algorithm, optimized for a single destination. Dijkstra’s algorithm finds the path for all positions, whereas A* finds the path to the nearest position from a set of positions. A* prioritizes paths that appear closer to the goal.
The formula for the A* algorithm is: F = G + H Where G is the cost of moving from the start point to a specified grid, and H is the estimated cost from the specified grid to the end point. There are two ways to calculate H:
Calculate the distance of horizontal and vertical movements, no diagonal movements allowed (Manhattan distance).
Calculate the distance of horizontal and vertical movements, diagonal movements allowed (Diagonal distance).
For an introduction and usage of the A* algorithm, refer to the video tutorial or visit the wiki at the following link: http://wiki.ros.org/global/planner
Also visit the redblobgames website: https://www.redblobgames.com/pathfinding/a-star/introduction.html#graphs
5.2.3 Local Path Planning
Global path planning takes the start and goal points as input and uses the obstacle information described in the global map to plan a global path from the start to the goal. The global path consists of a series of discrete waypoints and only considers static obstacle information. Therefore, the global path cannot be directly used for navigation control but serves as a macro-level reference for navigation.
5.2.3.1 DWA Algorithm
Description
The DWA algorithm, also known as the Dynamic Window Approach, is a classic algorithm for mobile robot path planning and motion control. DWA works by searching for the optimal combination of speed and angular velocity in the state space of velocity and angular velocity, enabling the robot to navigate safely on a known map. Here is the basic description and some formulas of the DWA algorithm:
The core concept of the DWA algorithm is that, at each moment, the robot considers its current state and sensor information, then generates a set of possible motion trajectories (also known as the dynamic window) in the state space of velocity and angular velocity, and evaluates these trajectories to select the optimal one. The evaluation criteria typically include avoiding obstacles, maximizing forward velocity, and minimizing angular velocity. By repeatedly performing this process, the robot can plan its motion trajectory in real time to adapt to dynamic environments and obstacles.
Formulas
The robot state: position (x, y) and orientation θ.
Motion control parameters: linear velocity
Vand angular velocityω.Sampling ranges for velocity and angular velocity: Vmin, Vmax, ωmin, and ωmax.
Time step: Δt
The formula is as follows:
Velocity sampling: The DWA algorithm first samples in the state space of velocity and angular velocity to generate a set of possible velocity-angular velocity pairs, which are referred to as the dynamic window.
Vsamples = [vmin, vmax]
ωsamples = [-ωmax, ωmax]
Where, (Vsamples) represents the velocity sampling range, and (ωsamples) represents the angular velocity sampling range.
Motion simulation: For each velocity-angular velocity pair, the DWA algorithm performs a motion simulation to calculate the trajectory of the robot when using these velocity-angular velocity combinations from the current state.
x(t+1) = x(t) + v * cos(θ(t)) *Δt
y(t+1) = y(t) + v * sin(θ(t)) *Δt
θ(t+1) = θ(t) + ω * Δt
Where, x(t) and y(t) represent the robot’s position, θ(t) represents the robot’s orientation, (v) represents the linear velocity, (ω) represents the angular velocity, and (Δt) represents the time step.
Trajectory evaluation: For each generated trajectory, the DWA algorithm evaluates the trajectory using evaluation functions, such as obstacle avoidance evaluation, maximum speed evaluation, and minimum angular velocity evaluation.
Obstacle avoidance evaluation: Detects whether the trajectory intersects with any obstacles.
Maximum speed evaluation: Checks whether the maximum linear velocity along the trajectory is within the allowed range.
Minimum angular velocity evaluation: Checks whether the minimum angular velocity along the trajectory is within the allowed range.
The evaluation functions can be defined and adjusted according to task requirements.
Selecting the best trajectory: The DWA algorithm selects the trajectory with the best evaluation score as the robot’s next movement.
Extensions
DWA Algorithm Extensions and Learning Links:
The DWA algorithm is a foundational algorithm in the field of mobile robotics, with several extended and improved versions, such as DWA, e-DWA, and DP-DWA, designed to enhance path planning performance and efficiency:
DWA Algorithm Extension: https://arxiv.org/abs/1703.08862
Enhanced DWA (e-DWA) Algorithm: https://arxiv.org/abs/1612.07470
DP-DWA Algorithm: https://arxiv.org/abs/1909.05305
For more details, visit the wiki: :http://wiki.ros.org/dwa_local_planner
These links provide comprehensive information and further research on the DWA algorithm and its extensions.
5.2.3.2 TEB Algorithm
Description
The Timed Elastic Band (TEB) algorithm is a path and motion planning algorithm primarily used in applications such as robotics and autonomous vehicles. The core concept of the TEB algorithm is to model the path planning problem as an optimization problem, where the goal is to generate an optimal trajectory within a given time frame while satisfying the robot or vehicle’s dynamic constraints and obstacle avoidance requirements. Key features of the TEB algorithm:
Time Hierarchical Representation: The TEB algorithm introduces time hierarchy. It divides the trajectory into multiple time steps. Each step corresponds to a position of the robot or vehicle along the path. This helps establish time constraints and avoid collisions.
Trajectory Parameterization: The TEB algorithm parameterizes the trajectory as a series of displacements and velocities, making optimization easier. Each time step has its own displacement and velocity parameters.
Constraint Optimization: The TEB algorithm considers the robot’s dynamic constraints, obstacle avoidance constraints, and trajectory smoothness constraints. These constraints are modeled as part of the objective function in the optimization problem.
Optimization Solving: The TEB algorithm uses optimization techniques, such as Quadratic Programming (QP) or Nonlinear Programming (NLP), to solve for the optimal trajectory parameters that satisfy the constraints.
Formulas
The following diagram describes the optimization objective function in the TEB algorithm:

Where:
(1) J(x) is the objective function, and x represents the trajectory parameters.
(2) wsmooth and wobstacle are the weights for smoothness and obstacle avoidance, respectively.
(3) H is the smoothness penalty matrix.
(4) f(xi,oj) represents the obstacle cost function between trajectory point xi and obstacle oj.
1. State Definition:
First, define the robot (or vehicle) state in the path planning problem.
(1) Position: P=[X,Y], represents the robot’s position on the 2D plane.
(2) Velocity: V = [Vx,Vy], represents the robot’s velocity along the X and Y axes.
(3) Time: t, represents time.
(4) Control Input: u = [ux, uy], represents the robot’s control input, which can be velocity or acceleration.
(5) Robot Trajectory: x(t)=[p(t),v(t)], represents the robot’s state at time t.
2. Objective Function:
The core of the TEB algorithm is an optimization problem, with the goal of minimizing an objective function composed of multiple components:

Where:
(1) Jsmooth(x): The smoothness objective function, used to ensure the generated trajectory is smooth.
(2) Jobstacle(x): The obstacle avoidance objective function, used to avoid collisions with obstacles.
(3) Jdynamic(x): The dynamics objective function, used to ensure the robot’s dynamic constraints are satisfied.
3. Smoothness Objective Function Jsmooth(x): The smoothness objective function typically involves the trajectory’s curvature to ensure the generated trajectory is smooth. It can be expressed as:

where k(t) is the curvature.
4. Obstacle Avoidance Objective Function Jobstacle(x):
The obstacle avoidance objective function calculates the distance between trajectory points and obstacles, penalizing trajectory points that are close to obstacles. The specific obstacle cost function f(x,o) can be defined as needed.

5. Dynamics Objective Function Jdynamic(x):
The dynamics objective function ensures that the generated trajectory satisfies the robot’s dynamic constraints, which can be defined based on the robot’s kinematic and dynamic models. Typically, this involves constraints on velocity and acceleration.
6. Optimization:
Finally, the TEB algorithm formulates the above objective functions as a constrained optimization problem, where the optimization variables include trajectory parameters, time allocation, and control inputs. This optimization problem is typically a Nonlinear Programming (NLP) problem.
Extensions
TEB Algorithm Extensions and Learning Links:
The TEB algorithm is an important technique in the field of path planning, with many extensions and improved variants. The learning links and extension topics below provide a deeper understanding of the TEB algorithm and related concepts:
Original TEB Algorithm Paper: One of the best learning resources is to review the original TEB algorithm paper to understand its principles and applications.
Original TEB Paper: Trajectory modification considering dynamic constraints of autonomous robots by M. Rösmann et al.
TEB Implementation in ROS:
The ROS package (Robot Operating System Package) for the TEB algorithm is a common implementation used for robot path planning.
ROS TEB Local Planner Package: https://github.com/rst-tu-dortmund/teb_local_planner
Official Wiki: http://wiki.ros.org/teb_local_planner
These links provide valuable resources for users to explore the TEB algorithm and its applications in path planning in greater depth.
5.2.4 Single/Multi-Point Navigation and Obstacle Avoidance
Start the robot and connect it to the remote control software NoMachine. For connection instructions, refer to 1.7.2 AP Mode Connection Steps.
Click the terminal icon
 in the system desktop to open a command-line window. Enter the command to disable the app auto-start service.
in the system desktop to open a command-line window. Enter the command to disable the app auto-start service.
sudo systemctl stop start_app_node.service
Entering the following command and press Enter to start the navigation service.
ros2 launch navigation navigation.launch.py map:=map_01
The map_01 at the end of the command is the map name. Modify this parameter as needed. The map is stored in /home/ubuntu/ros2_ws/src/slam/maps.
Open a new terminal and enter the following command to launch RViz and display navigation:
ros2 launch navigation rviz_navigation.launch.py
5.2.4.1 Single-Point Navigation
In the software menu bar, 2D Pose Estimate is used to set the robot’s initial position, and 2D Nav Goal is used to set a single target point for the robot.
To set the robot’s initial position, click on
 in the software interface, select a location on the map, then click and drag the mouse to choose the robot’s pose.
in the software interface, select a location on the map, then click and drag the mouse to choose the robot’s pose.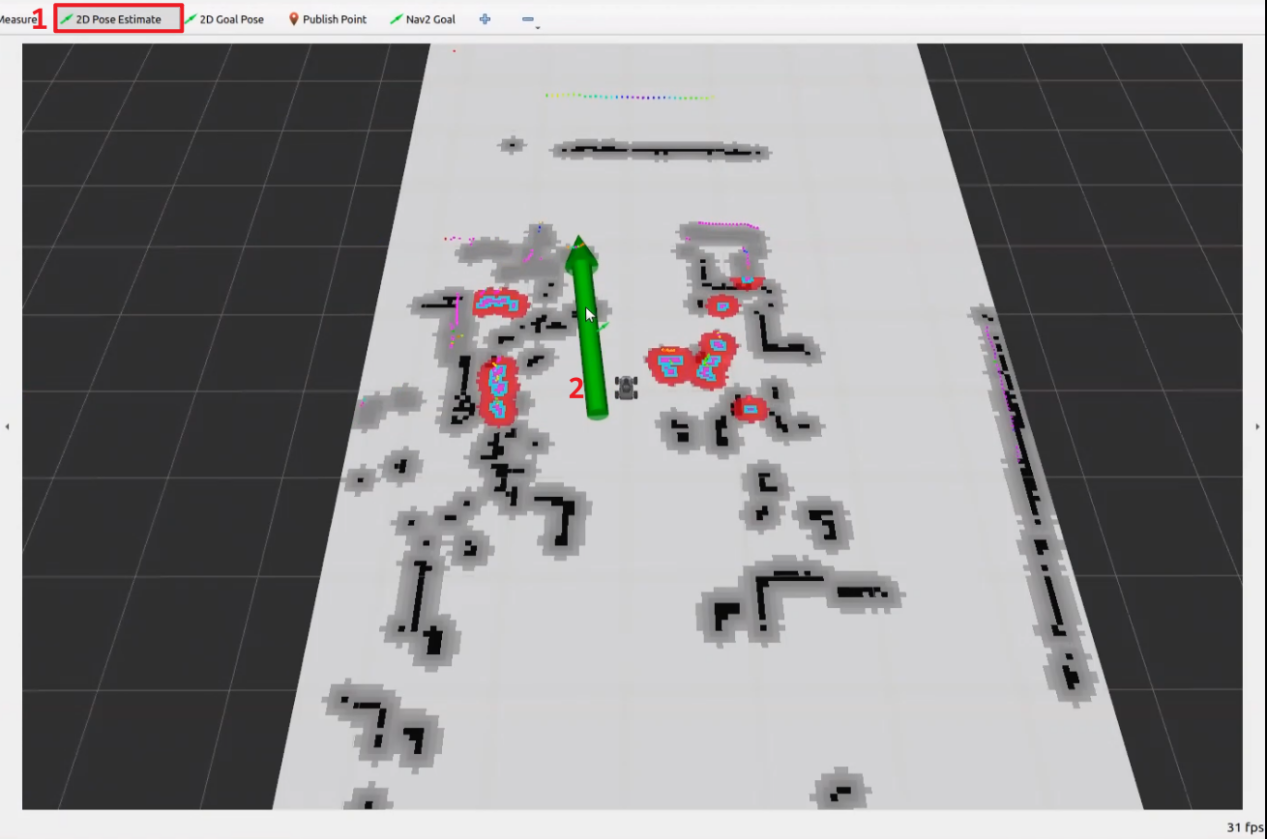
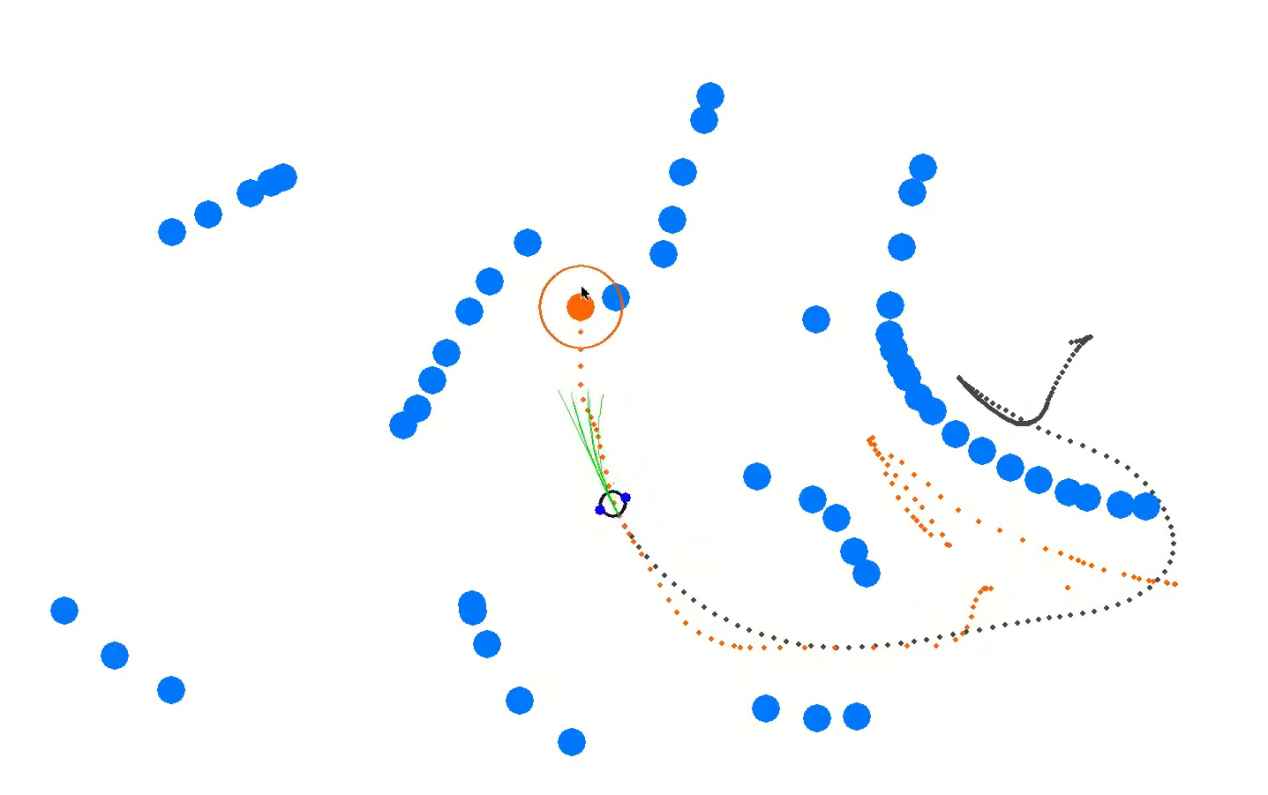
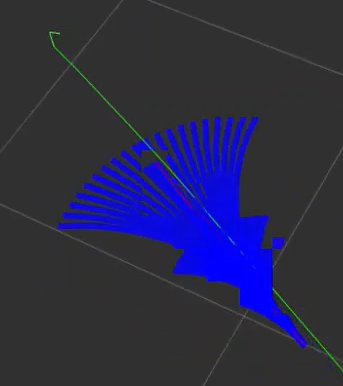
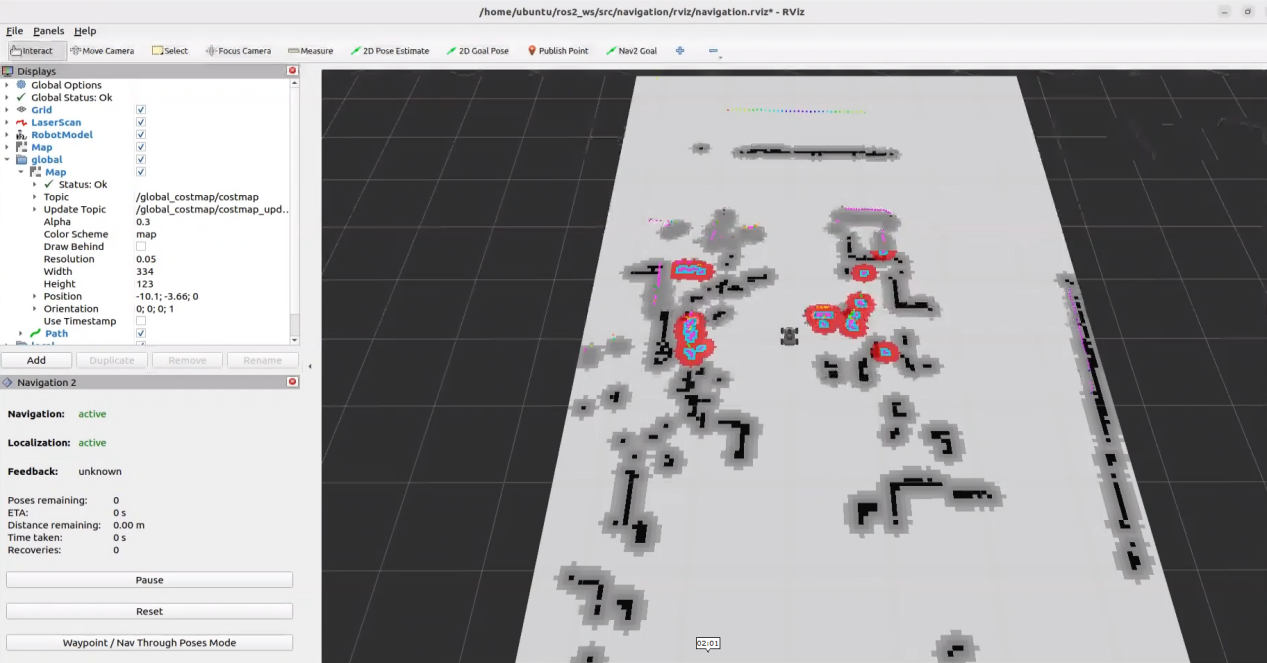
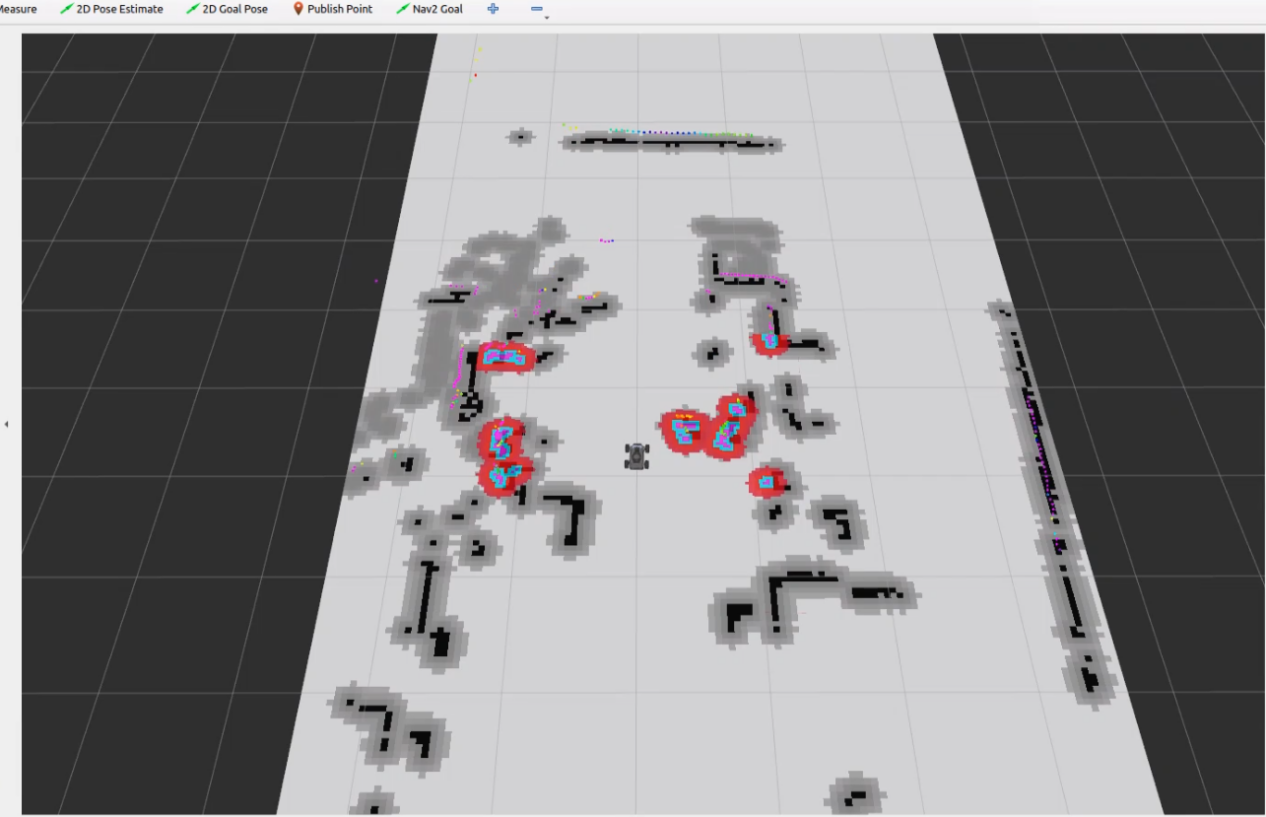
After setting the robot’s initial position, the result is as shown below where the robot’s LiDAR point cloud data overlaps with the obstacles in the map.
Click the icon
 and select a target point on the map. Simply click once at the target point on the map. After the selection, the robot will automatically generate a route and move toward the target point.
and select a target point on the map. Simply click once at the target point on the map. After the selection, the robot will automatically generate a route and move toward the target point.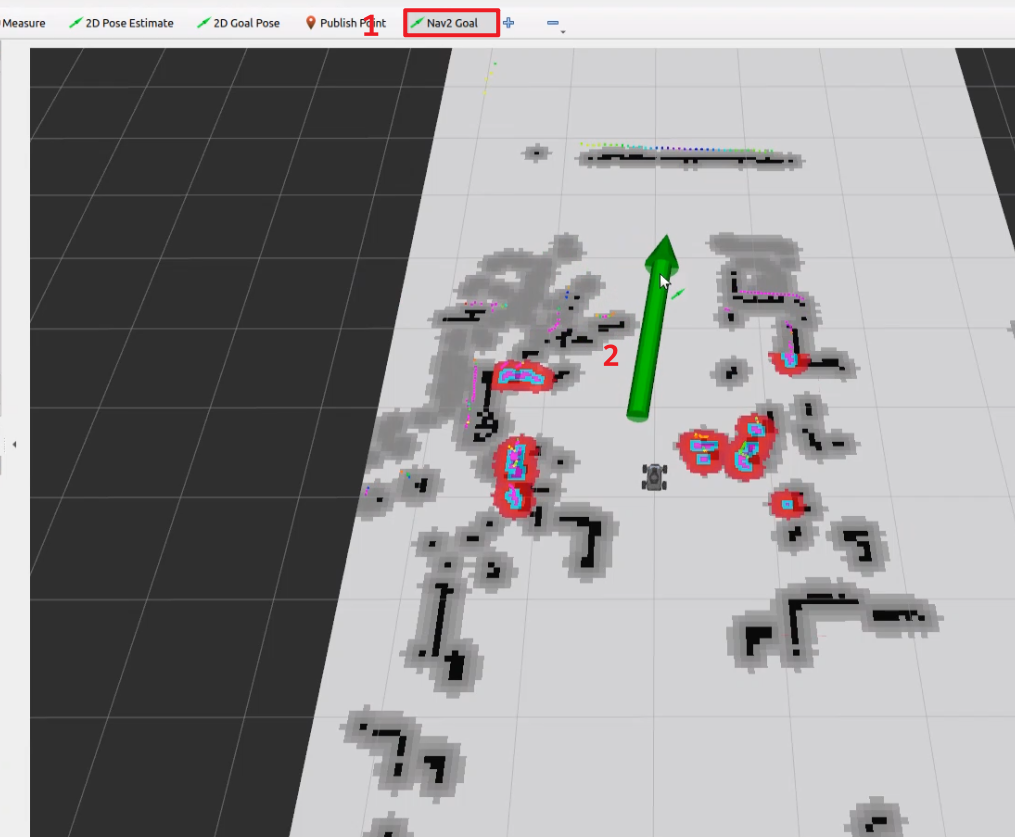
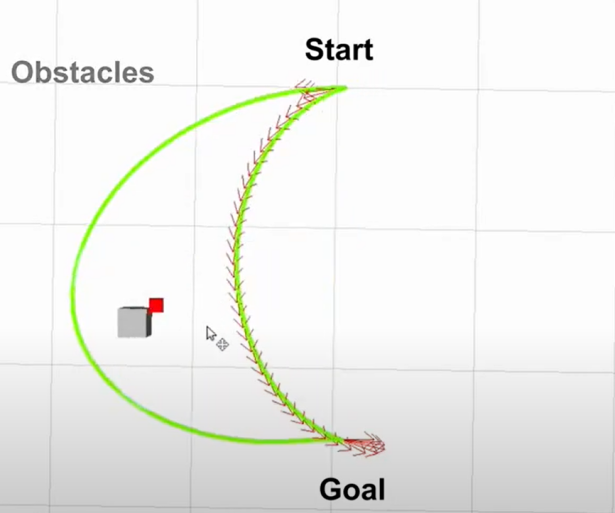
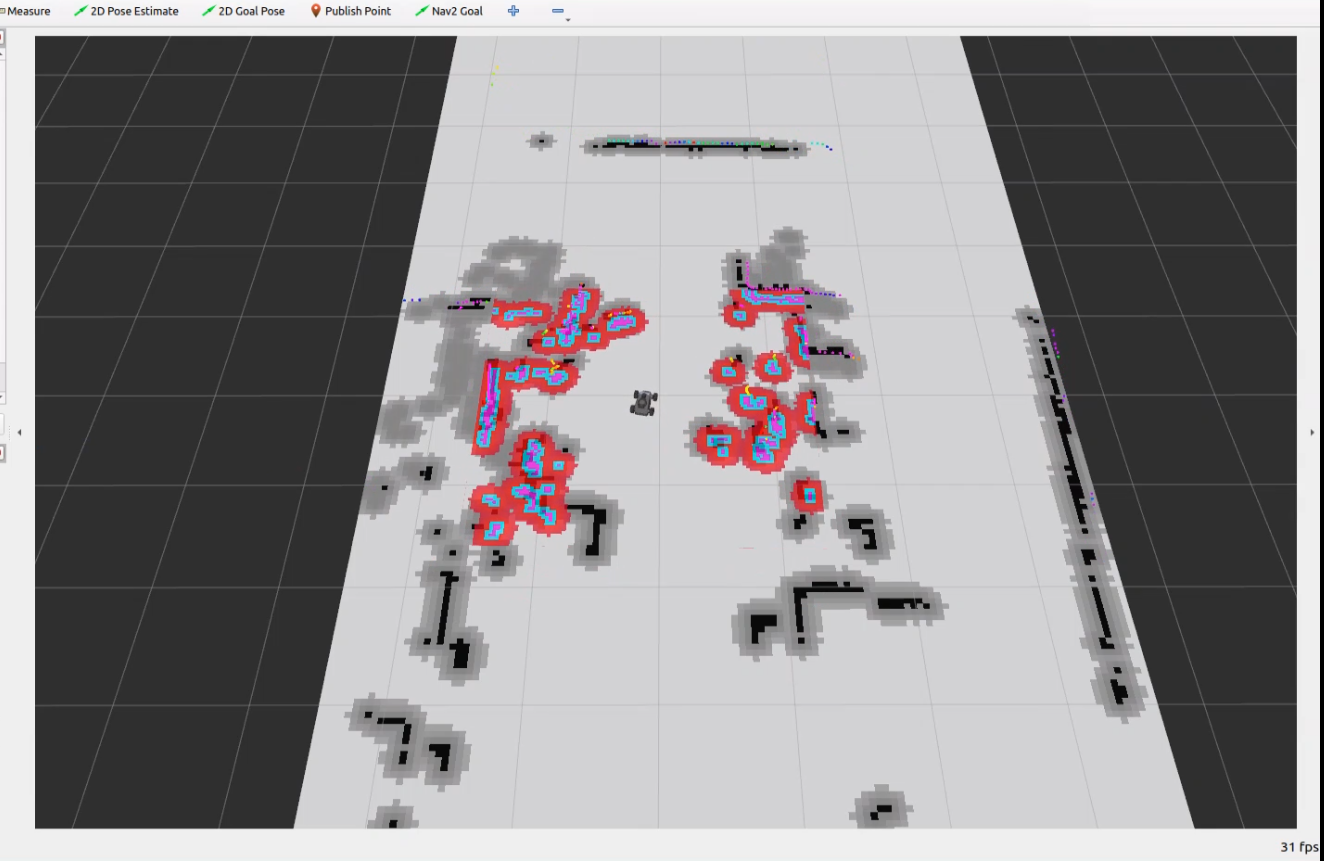
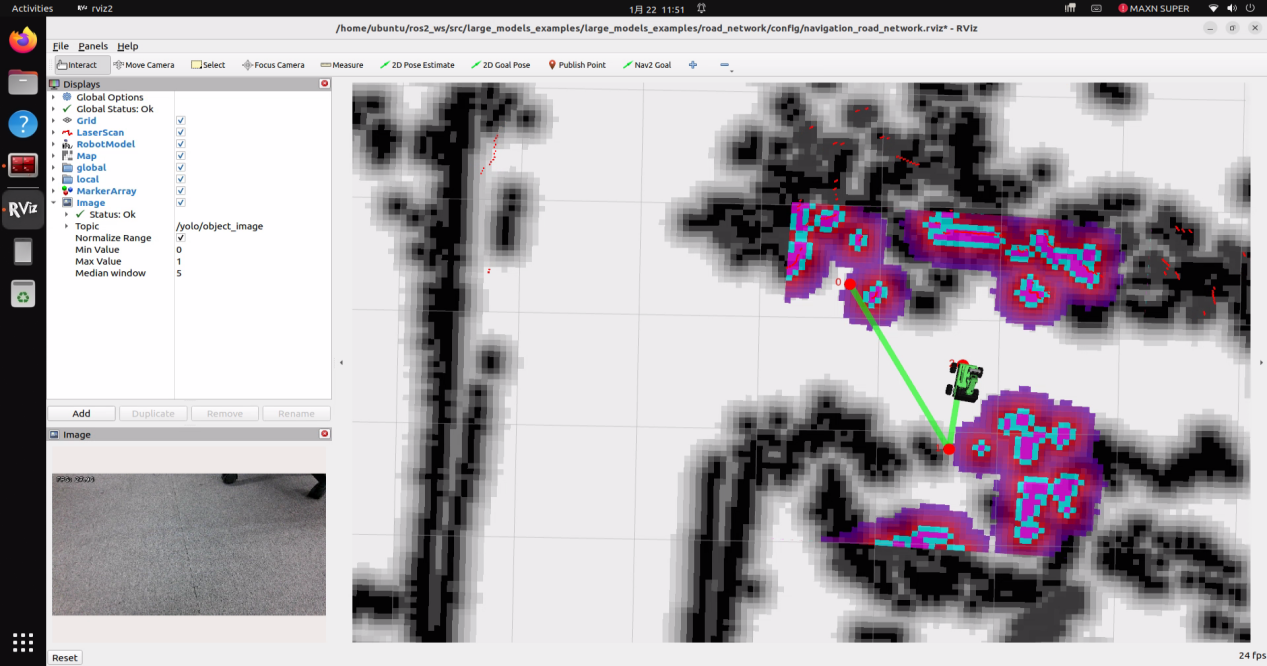
Once the target point is set, the map displays two paths. The green line represents the straight path between the robot and the target point. The dark blue line represents the robot planned path.
When the robot reaches the set target point, navigation is complete.
5.2.4.2 Multi-Point Navigation
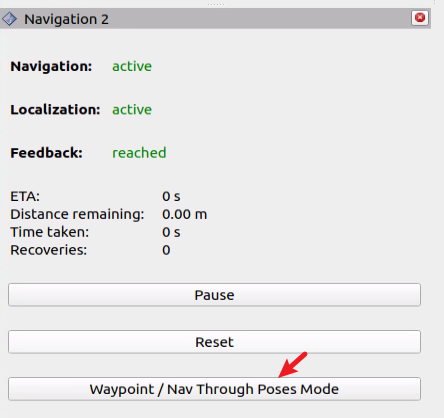
In the RViz2 software tool, find the navigation toolbar in the lower left corner, then click the Waypoint button to enter multi-point navigation mode.
Click the Nav2 Goal button to set the goals.

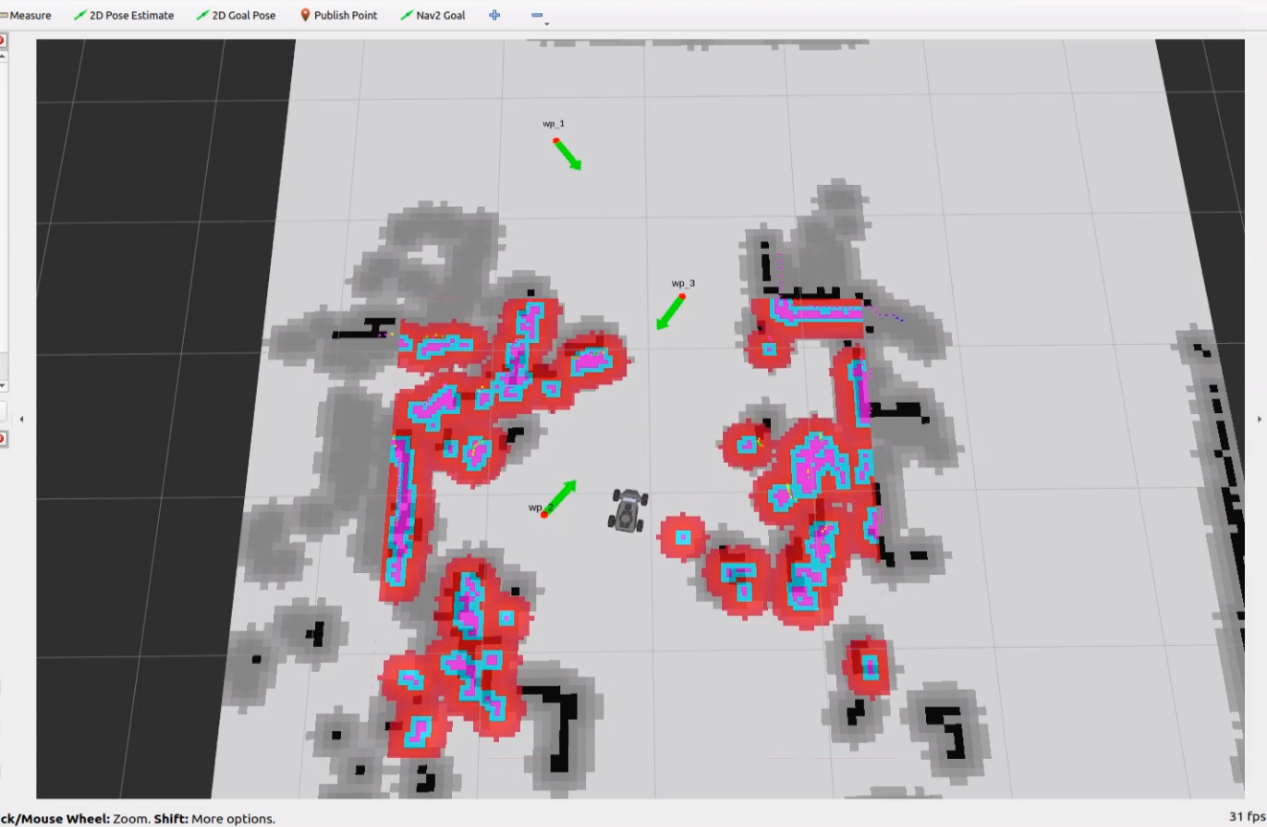
Next, set the robot’s navigation points in the non-obstacle areas of the map:
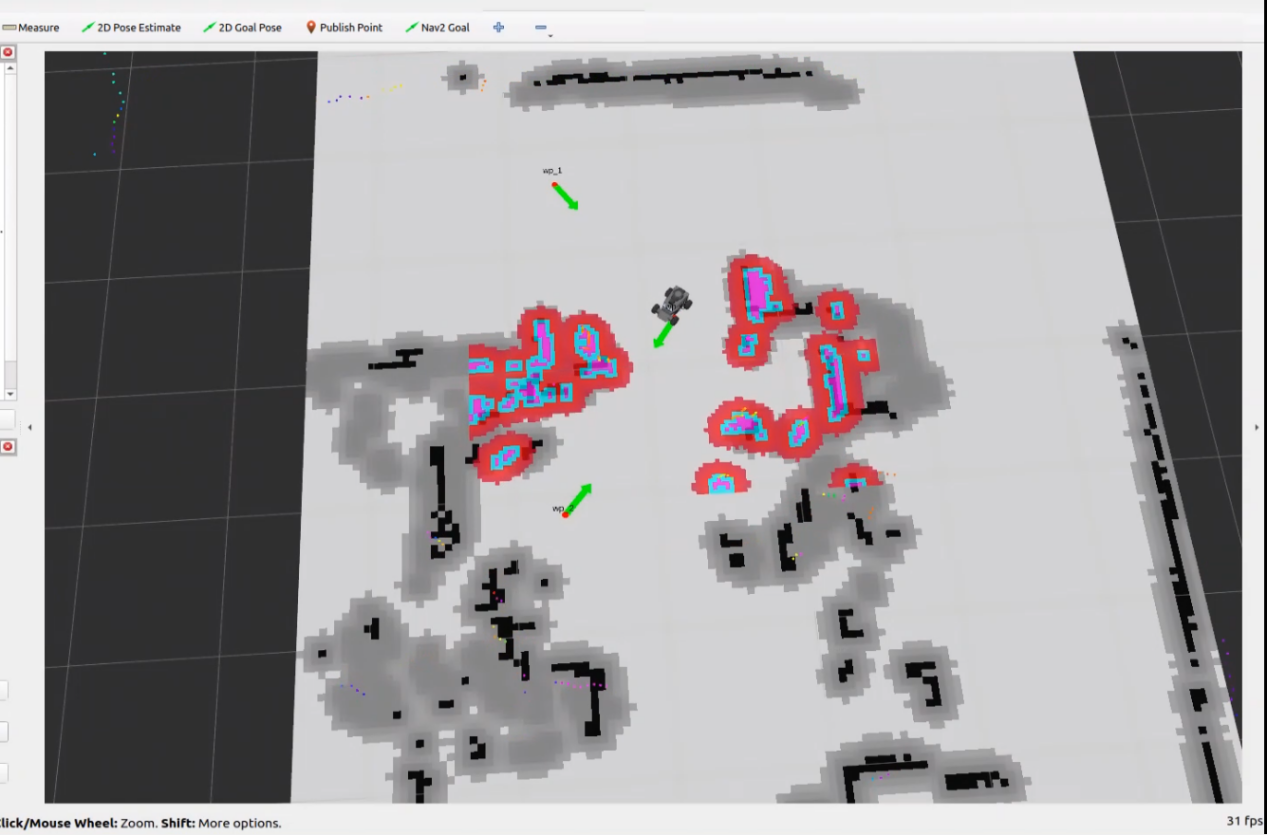
The setting method involves left-clicking to set a target point, then dragging the mouse to set the robot’s orientation. The direction indicated by the arrow is the robot’s forward direction. The example below shows three target points set for the robot.
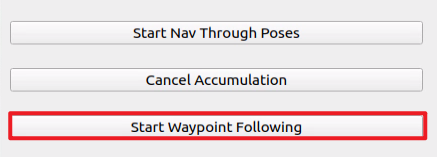
Finally, click Start Nav Through Poses or Start Waypoint Following to enable navigation. Start Nav Through Poses will control the robot’s posture at each navigation point. Start Waypoint Following will not focus on the robot’s posture at each navigation point. It is recommended to use Start Waypoint Following for navigation.
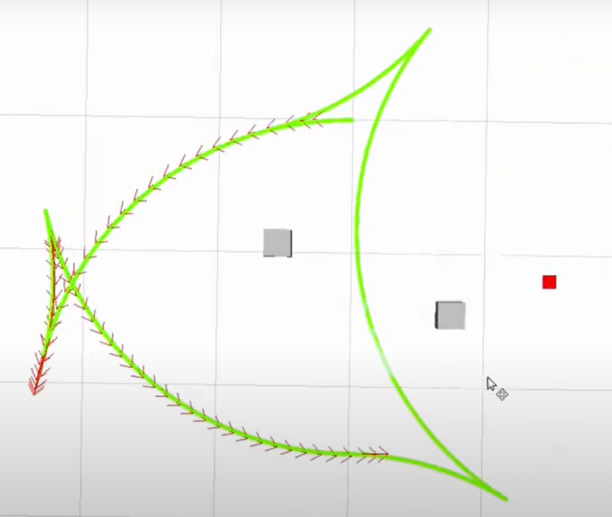
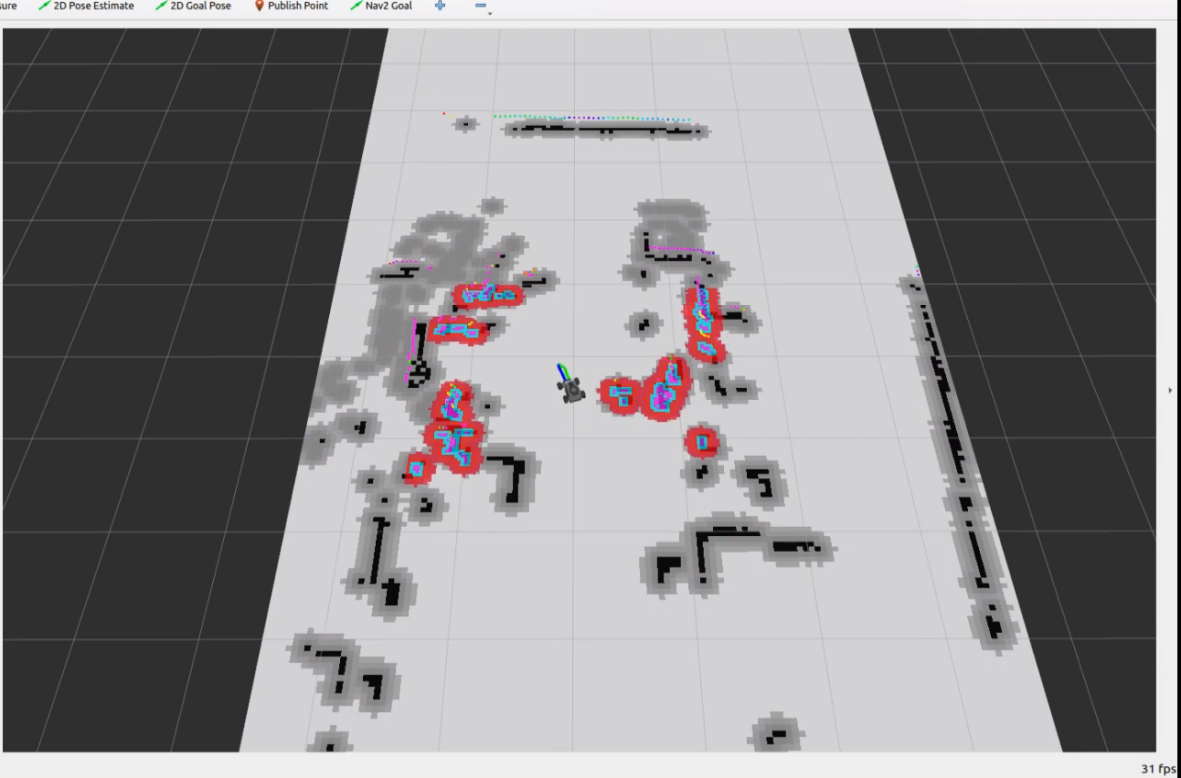
The result of multi-point navigation is shown in the image below, with the robot reaching the target points in sequence.
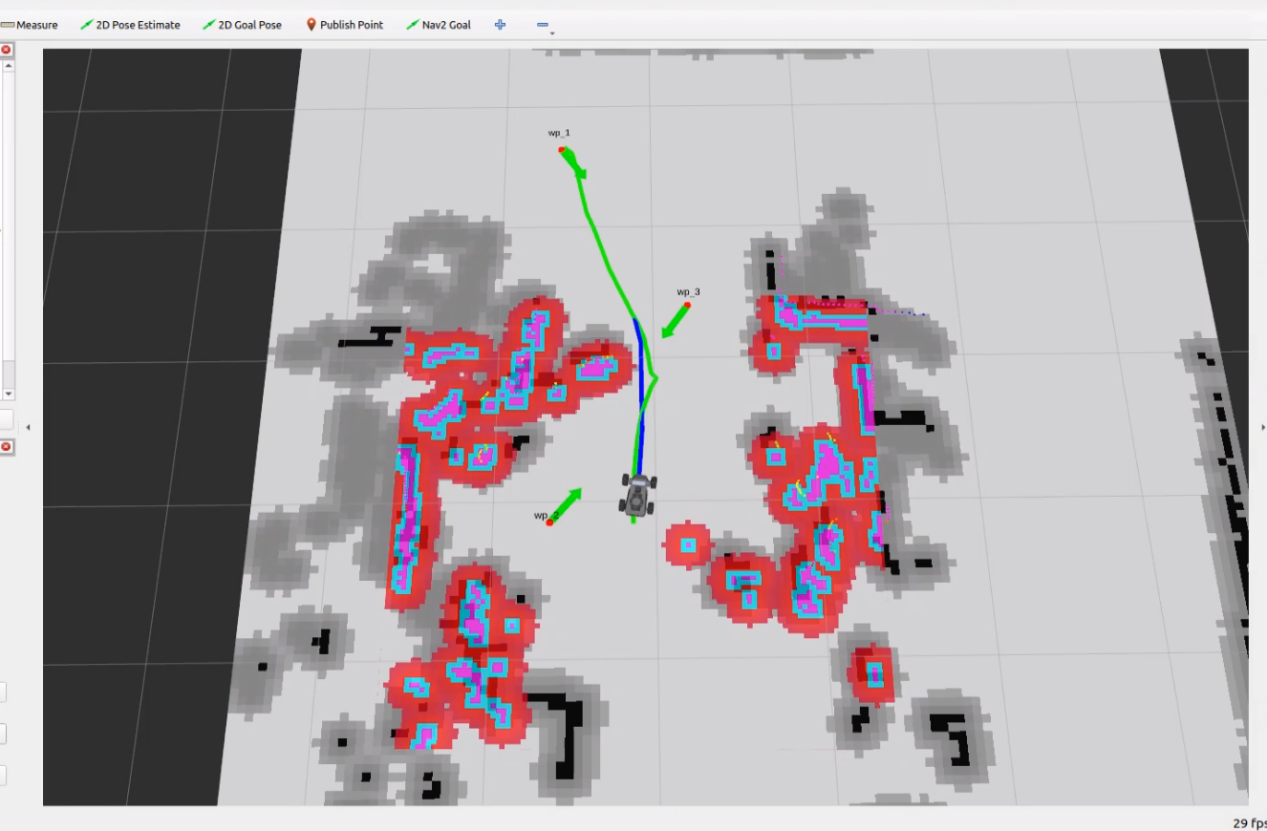
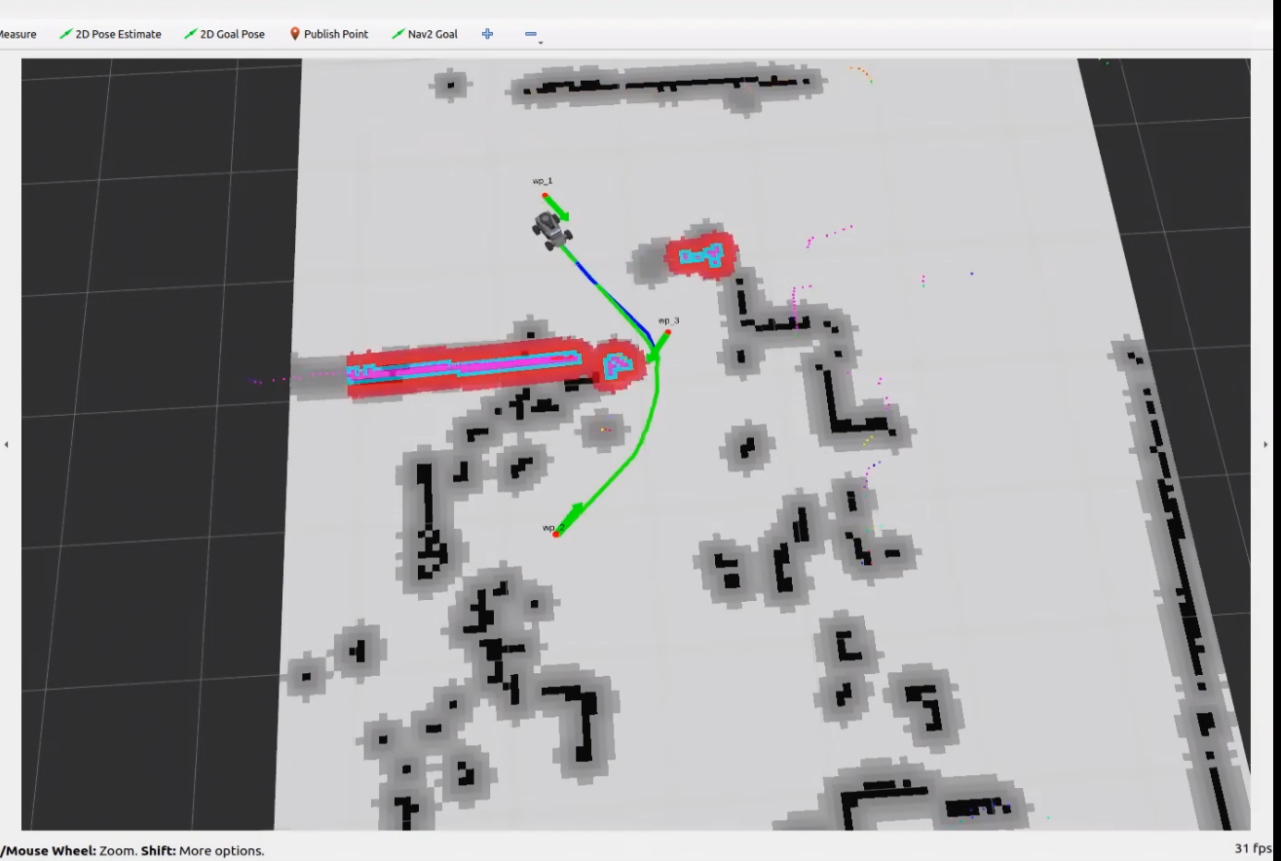
When the robot reaches the last set target point, it indicates that the multi-point navigation is complete.
5.2.4.3 Exit Navigation
Right-click on the system command terminal icon, then click New Window to open a new command terminal.
Next, enter the following command and press Enter to execute the program for all ROS nodes in the current system environment. If it does not close successfully, try a few more times.
~/.stop_ros.sh
5.2.4.4 Launch Instruction
The path to the launch file is located at:
/home/ubuntu/ros2_ws/src/navigation/launch/navigation.launch.py
import os
from ament_index_python.packages import get_package_share_directory
from launch_ros.actions import PushRosNamespace
from launch import LaunchDescription, LaunchService
from launch.substitutions import LaunchConfiguration
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch.actions import DeclareLaunchArgument, IncludeLaunchDescription, GroupAction, OpaqueFunction, TimerAction
Set Path
Get the paths of the peripherals,controller,servo_controller packages.
if compiled == 'True':
slam_package_path = get_package_share_directory('slam')
navigation_package_path = get_package_share_directory('navigation')
else:
slam_package_path = '/home/ubuntu/ros2_ws/src/slam'
navigation_package_path = '/home/ubuntu/ros2_ws/src/navigation'
Launch Other Files
base_launchis used for various hardware.navigation_launchlaunches the navigation algorithm.bringup_launchinitializes actions.
base_launch = IncludeLaunchDescription(
PythonLaunchDescriptionSource(os.path.join(slam_package_path, 'launch/include/robot.launch.py')),
launch_arguments={
'sim': sim,
'master_name': master_name,
'robot_name': robot_name
}.items(),
)
navigation_launch = IncludeLaunchDescription(
PythonLaunchDescriptionSource(os.path.join(navigation_package_path, 'launch/include/bringup.launch.py')),
launch_arguments={
'use_sim_time': use_sim_time,
'map': os.path.join(slam_package_path, 'maps', map_name + '.yaml'),
'params_file': os.path.join(navigation_package_path, 'config', 'nav2_params.yaml'),
'namespace': robot_name,
'use_namespace': use_namespace,
'autostart': 'true',
'use_teb': use_teb,
}.items(),
)
bringup_launch = GroupAction(
actions=[
PushRosNamespace(robot_name),
base_launch,
TimerAction(
period=10.0, # Delay for enabling other nodes
actions=[navigation_launch],
),
]
)
5.2.4.5 Package Description
The path to the navigation package is: ~/ros2_ws/src/navigation/

config: Contains configuration parameters related to navigation, as shown in the figure below.

launch: Includes launch files related to navigation, including files for localization, map loading, navigation methods, and simulation model launch files, as shown in the figure below.

rviz: Loads parameters for the RViz visualization tool, including robot RViz configuration files for different navigation algorithms and navigation configuration files, as shown in the figure below.

Package.xml: The configuration file for the current package.
5.2.5 RTAB-VSLAM 3D Navigation
5.2.5.1 Algorithm Introduction and Principles
For an introduction to the RTAB-VSLAM algorithm and its principles, refer to the section 5.1.5 RTAB-VSLAM 3D Mapping in this tutorial for learning and reference.
5.2.5.2 Operating Steps
Start the robot and connect it to the remote control software NoMachine. For connection instructions, refer to 1.7.2 AP Mode Connection Steps.
Click the terminal icon
in the system desktop to open a command-line window. Enter the command to disable the app auto-start service.
sudo systemctl stop start_app_node.service
Enter the following command and press Enter to start the navigation service.
ros2 launch navigation rtabmap_navigation.launch.py
Open a new terminal and enter the following command to launch RViz and display navigation:
ros2 launch navigation rviz_rtabmap_navigation.launch.py
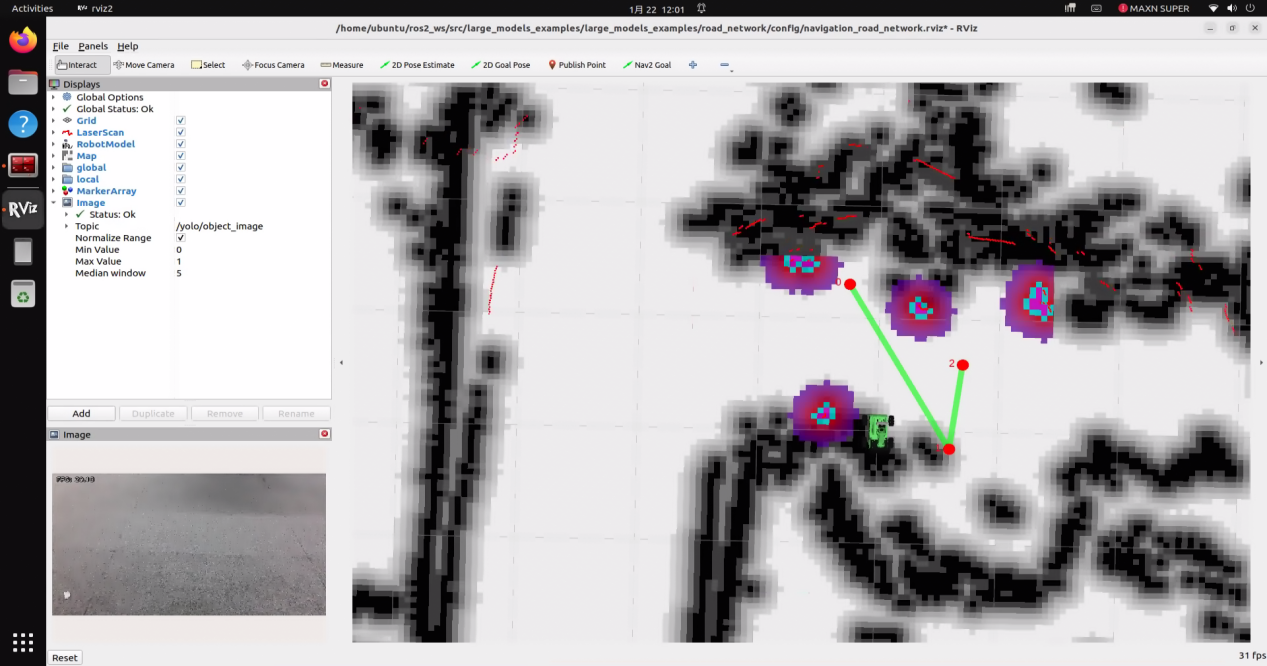
The program will appear as shown below after starting successfully.
Click on the target point setting icon
 at the top of the software to set a navigation target point for the robot.
at the top of the software to set a navigation target point for the robot.Select a location on the map and click once with the mouse at the desired target point on the map interface. After the selection, the robot will automatically generate a route and move toward the target point.

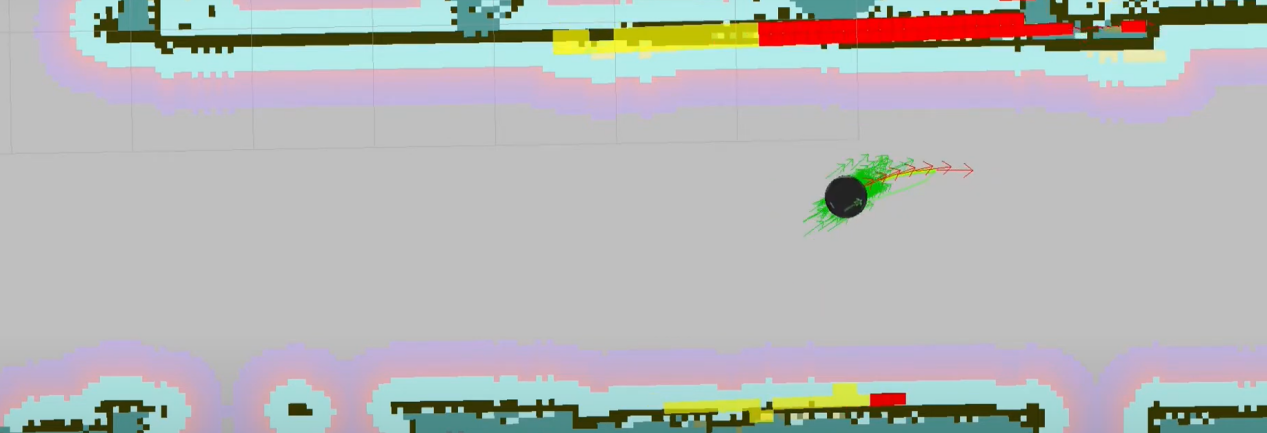
Once the target point is set, the map will display two paths. The robot will move towards the target along these two paths.
The green path is the global path planned by the global planner.
The blue path is the local path planned by the local planner.
When encountering obstacles, the robot will bypass them while continuously adjusting its posture and trajectory.
5.2.5.3 Launch Instruction
The path to the launch file is located at:
/home/ubuntu/ros2_ws/src/navigation/launch/navigation.launch.py
import os
from ament_index_python.packages import get_package_share_directory
from launch_ros.actions import PushRosNamespace
from launch import LaunchDescription, LaunchService
from launch.substitutions import LaunchConfiguration
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch.actions import DeclareLaunchArgument, IncludeLaunchDescription, GroupAction, OpaqueFunction, TimerAction
def launch_setup(context):
compiled = os.environ['need_compile']
if compiled == 'True':
slam_package_path = get_package_share_directory('slam')
navigation_package_path = get_package_share_directory('navigation')
else:
slam_package_path = '/home/ubuntu/ros2_ws/src/slam'
navigation_package_path = '/home/ubuntu/ros2_ws/src/navigation'
sim = LaunchConfiguration('sim', default='false').perform(context)
map_name = LaunchConfiguration('map', default='map_01').perform(context)
robot_name = LaunchConfiguration('robot_name', default=os.environ['HOST']).perform(context)
master_name = LaunchConfiguration('master_name', default=os.environ['MASTER']).perform(context)
use_teb = LaunchConfiguration('use_teb', default='true').perform(context)
sim_arg = DeclareLaunchArgument('sim', default_value=sim)
map_name_arg = DeclareLaunchArgument('map', default_value=map_name)
master_name_arg = DeclareLaunchArgument('master_name', default_value=master_name)
robot_name_arg = DeclareLaunchArgument('robot_name', default_value=robot_name)
use_teb_arg = DeclareLaunchArgument('use_teb', default_value=use_teb)
Set Path
Get the paths of the peripherals, controller, servo_controller packages.
compiled = os.environ['need_compile']
if compiled == 'True':
slam_package_path = get_package_share_directory('slam')
navigation_package_path = get_package_share_directory('navigation')
else:
slam_package_path = '/home/ubuntu/ros2_ws/src/slam'
navigation_package_path = '/home/ubuntu/ros2_ws/src/navigation'
Launch Other Files
rtabmap_launch: Start 3D navigation algorithmnavigation_launch: Start 2D navigation algorithmbringup_launch: Initialize actions
base_launch = IncludeLaunchDescription(
PythonLaunchDescriptionSource(os.path.join(slam_package_path, 'launch/include/robot.launch.py')),
launch_arguments={
'sim': sim,
'master_name': master_name,
'robot_name': robot_name
}.items(),
)
navigation_launch = IncludeLaunchDescription(
PythonLaunchDescriptionSource(os.path.join(navigation_package_path, 'launch/include/bringup.launch.py')),
launch_arguments={
'use_sim_time': use_sim_time,
'map': os.path.join(slam_package_path, 'maps', map_name + '.yaml'),
'params_file': os.path.join(navigation_package_path, 'config', 'nav2_params.yaml'),
'namespace': robot_name,
'use_namespace': use_namespace,
'autostart': 'true',
'use_teb': use_teb,
}.items(),
)
bringup_launch = GroupAction(
actions=[
PushRosNamespace(robot_name),
base_launch,
TimerAction(
period=10.0, # Delay for enabling other nodes
actions=[navigation_launch],
),
]
)
5.2.6 Route Planning
5.2.6.1 Algorithm Introduction and Principles
Introduction to Route Planning
Route planning is a real-time path planning and navigation system built on graph theory. It is an open-source navigation framework that performs efficient path search through predefined waypoint nodes and adjacency relationships. By constraining the search space to a predefined route-network graph, the system completes path planning within a fixed time limit and meets the requirements of online navigation in long-term and large-scale environments. The system integrates a visual perception module that can recognize traffic lights and perform intelligent stop control. It also includes a breakpoint recovery mechanism that can pause and resume path tracking when obstacles or traffic signals are encountered.
Algorithm Principles
Route planning uses a graph-based path planning method. Its advantage is that most practical scenes can provide clear path nodes, which gives the method good scene adaptability and enables rapid path search with the predefined route-network structure.
After the predefined route-network nodes and adjacency relationships are obtained, the connections between nodes need to be matched to form a searchable graph structure. Once the matching is complete, the data is divided into two categories: long-term memory data and short-term memory data. Long-term memory data stores the complete route-network graph structure, including all nodes and adjacency relationships. Short-term memory data stores the current planned path sequence and the path points that are currently being executed.
During operation, the route planning algorithm first uses the Breadth-First Search algorithm in the long-term memory data, which is the complete route-network graph, to find the shortest path from the start point to the end point and obtain the node sequence. The node sequence is then converted into a dense sequence of path points through linear interpolation to form the short-term memory data, which is the currently executed path. When the robot encounters a traffic light or an obstacle during path execution, the system pauses path tracking and saves the current state. When the obstacle is cleared or the traffic light changes to an allowed state, the system searches the short-term memory data, which is the historical path, for the nearest path point to the current position. It then takes the remaining path segment and continues execution to achieve breakpoint recovery. This mechanism enables robust autonomous navigation in complex environments.
5.2.6.2 Preparation
Map construction: Before starting this feature, build a map first by referring to 5.1 Mapping Tutorial.
Editing the Waypoint Network
Click the terminal icon
 on the system desktop to open a terminal. Run the following command to stop the app auto-start service:
on the system desktop to open a terminal. Run the following command to stop the app auto-start service:sudo systemctl stop start_app_node.service

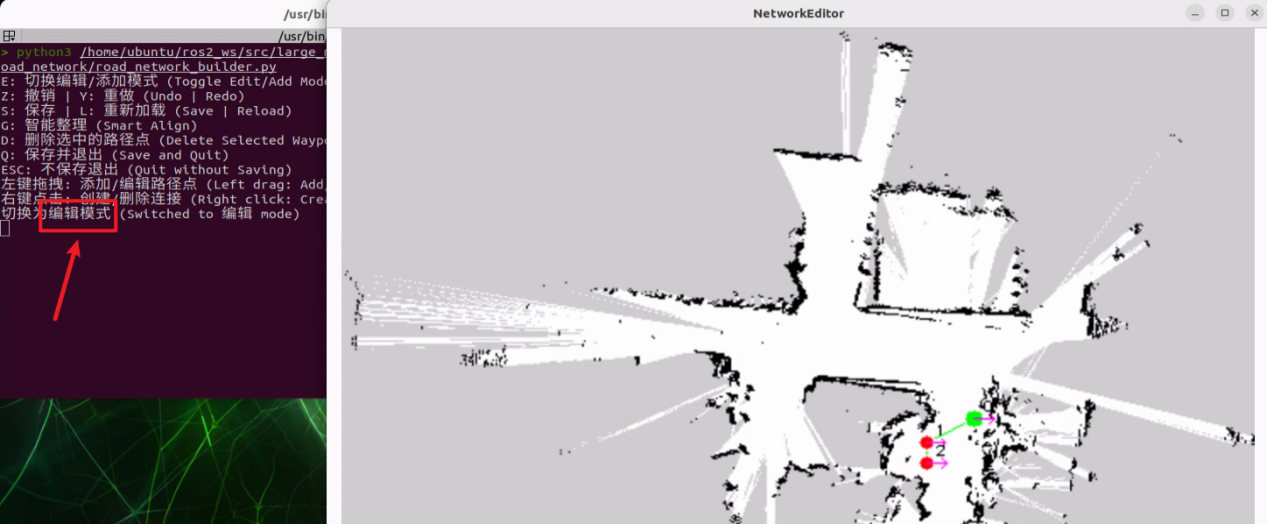
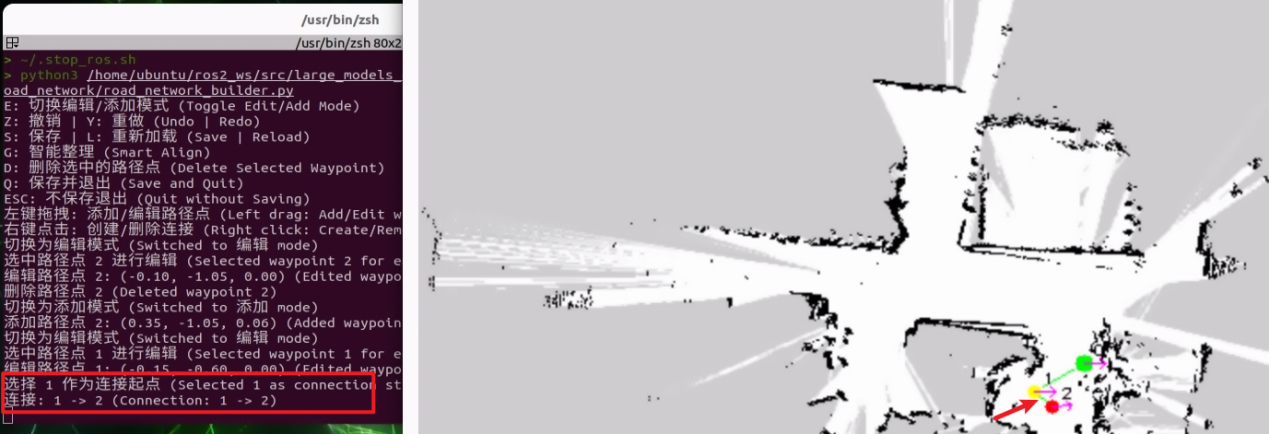
Run the following command to open the graphical editor for route-network waypoint editing:
python3 /home/ubuntu/ros2_ws/src/large_models_examples/large_models_examples/road_network/road_network_builder.py
Command references can be viewed in the terminal.
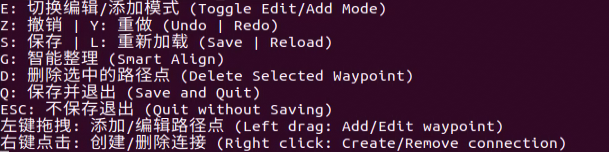
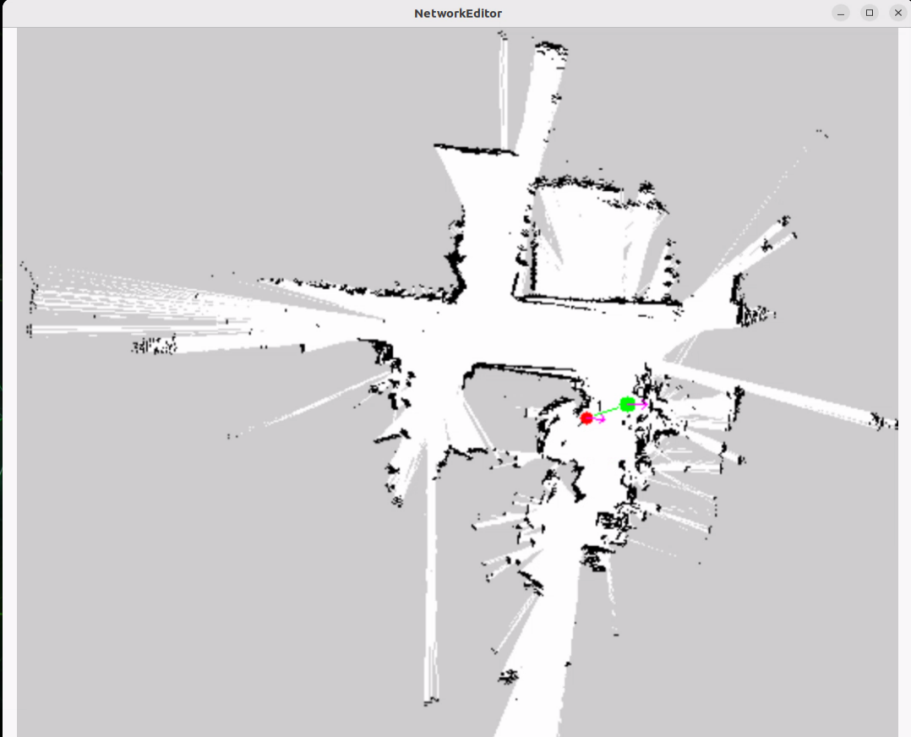
Click the graphical editor, then press E to switch to Edit Mode.
In Edit Mode, left-click waypoint 2 to select it, then press D to delete the waypoint.
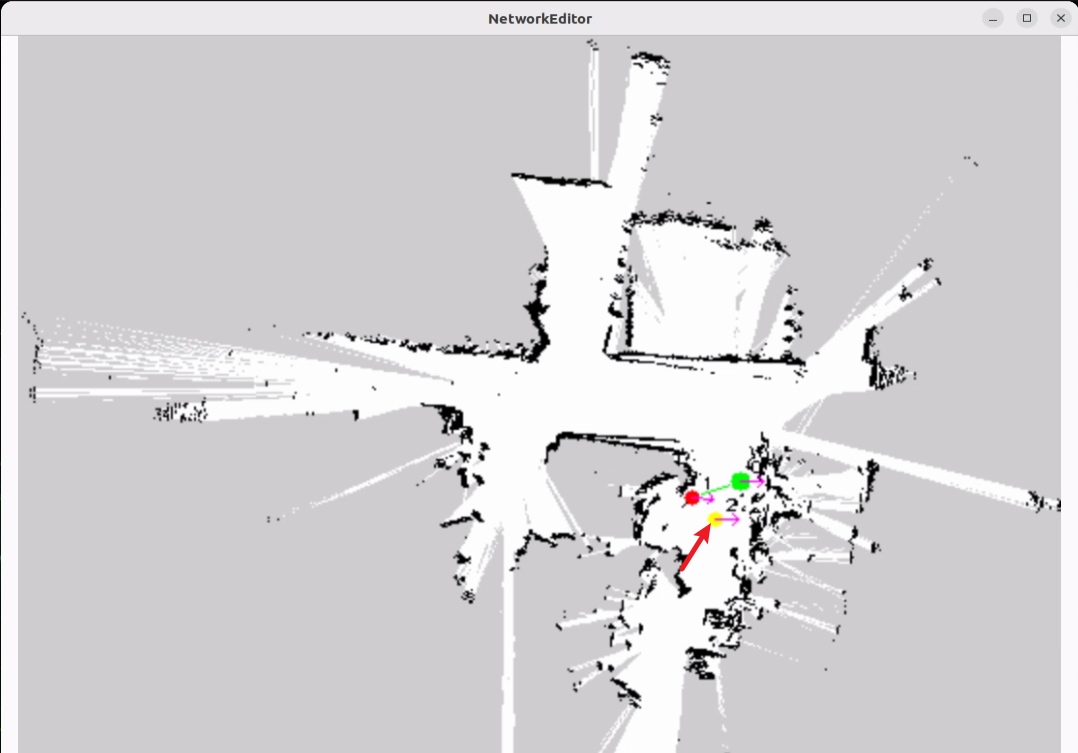
Press E again to enter Add Mode. In Add Mode, left-click and drag the mouse to create a new waypoint.
Press E again to return to Edit Mode. Right-click waypoint 1 and select it as the connection point. Then right-click waypoint 2 to connect waypoints 1 and 2.
For other operations, refer to the command references shown in the terminal.
Press Q to save the data and quit. Press Esc to exit without saving.
Default save path: /home/ubuntu/ros2_ws/src/large_models_examples/large_models_examples/road_network/config/road_network.yaml

5.2.6.3 Operational Steps
Click the terminal icon
on the system desktop to open a terminal. Run the following command to stop the app auto-start service:sudo systemctl stop start_app_node.service
Run the following command to start route planning:
ros2 launch large_models_examples road_network.launch.py

Open another terminal and run the following command to send the robot to waypoint 2.
Publish the waypoint ID to the
/request_waypointtopic:ros2 topic pub /request_waypoint std_msgs/msg/Int32 "data: 2" --once

The robot will move to waypoint 2.
To stop this feature, press Ctrl + C in the terminal. If the feature does not stop successfully, press it several more times. If the process still cannot exit, open a new terminal and run the following command to stop the ROS nodes:
~/.stop_ros.sh
5.2.6.4 Program Analysis
(1) Launch File
Program path:
/home/ubuntu/ros2_ws/src/large_models_examples/large_models_examples/road_network/road_network.launch.py
Launch Another Launch File
navigation_launch = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(
large_models_example_package_path,
'road_network/include/navigation.launch.py'
)
),
launch_arguments={
'sim': 'false',
'map': map_name,
'robot_name': robot_name,
'master_name': master_name,
'use_rpp': 'true',
'use_teb': 'false',
}.items(),
)
Start Nodes
rviz_node = ExecuteProcess(
cmd=[
'rviz2',
'-d',
os.path.join(
large_models_example_package_path,
'road_network/config',rviz_name
),
],
output='screen'
)
rviz_node: Starts the RViz2 visualization tool and loads the corresponding configuration file.
navigation_controller_node = Node(
package='large_models_examples',
executable='nav2_execution_node',
name='nav2_execution_node',
output='screen'
)
navigation_controller_node: Starts nav2_execution_node, which executes navigation path commands.
road_network_navigator_node = Node(
package='large_models_examples',
executable='road_network_navigator',
name='road_network_navigator',
output='screen',
parameters=[{
'file_name':file_name,
'use_yolo_detect': use_yolo_detect,
}]
)
road_network_navigator_node: Starts road_network_navigator, which is the core node for route-network navigation. Parameters include file_name, the route-network file name, and use_yolo_detect, the YOLO detection switch.
yolov_node = Node(
package='example',
executable='yolov11_node',
output='screen',
parameters=[{'camera': camera_type, 'task': 'detect', 'engine': 'best_traffic.engine', 'conf': 0.6, 'display_only': False}]
)
yolov_node: Starts yolov11_node, which is the YOLO object detection node. Parameters include camera, the camera type, task, the detection task, engine, best_traffic.engine–the traffic sign detection model, conf, 0.6–the confidence threshold, and display_only set to False.
(2) Python File
Program path:
/home/ubuntu/ros2_ws/src/large_models_examples/large_models_examples/road_network/road_network_navigator.py
Initialization
self.declare_parameter('file_name', 'road_network')
self.frame_id = 'map'
self.base_frame_id = 'base_link'
self.cmd_vel_topic = '/controller/cmd_vel'
Parameters and configuration:
file_name: Route-network file name parameter. The default value is road_network.
self.frame_id: Map coordinate frame. The default value is map.
self.base_frame_id: Robot base coordinate frame. The default value is base_link.
self.cmd_vel_topic: Velocity control topic. The default value is /controller/cmd_vel.
self.waypoints = {}
self.adjacency_list = {}
self.current_index = 0
self.target_index = None
self.active_goal_index = None
self.is_moving = False
# Store current dense path for breakpoint recovery
self.current_execution_path = []
self.tf_buffer = Buffer()
self.tf_listener = TransformListener(self.tf_buffer, self)
self.debug_last_reach_time = 0.0
self.min_reach_interval = 0.5
self.traffic_signs_status = None
self.last_sign_time = 0.0
self.sign_validity_period = 3.0
self.waiting_for_light = False
self.traffic_light_waypoint_id = 16 # Set traffic light recognition position
self.stop_signal_triggered = False
State variables:
self.waypoints: Dictionary of waypoints that stores the position data of all waypoints.
self.adjacency_list: Adjacency list dictionary that stores the connection relationships between waypoints.
self.current_index: Index of the current waypoint. The default value is 0.
self.target_index: Index of the target waypoint. The initial value is None.
self.active_goal_index: Currently active target index.
self.is_moving: Motion state flag. False means stationary.
# Store current dense path for breakpoint recovery
self.current_execution_path = []
self.tf_buffer = Buffer()
self.tf_listener = TransformListener(self.tf_buffer, self)
self.debug_last_reach_time = 0.0
self.min_reach_interval = 0.5
self.traffic_signs_status = None
self.last_sign_time = 0.0
self.sign_validity_period = 3.0
self.waiting_for_light = False
self.traffic_light_waypoint_id = 16 # Set traffic light recognition position
self.stop_signal_triggered = False
self.current_execution_path: Dense path list for the current execution. It is used for breakpoint recovery.
self.tf_buffer: TF2 transform buffer.
self.tf_listener: TF2 transform listener.
self.debug_last_reach_time: Timestamp of the last arrival at the target.
self.min_reach_interval: Minimum arrival interval. The value is 0.5 seconds.
self.traffic_signs_status: Traffic sign status information.
self.last_sign_time: Time when a traffic sign was last detected.
self.sign_validity_period: Traffic sign validity duration. The value is 3.0 seconds.
self.waiting_for_light: Traffic light waiting flag. False means the system is not waiting.
self.traffic_light_waypoint_id: Waypoint ID for traffic light recognition. The default value is 16.
self.stop_signal_triggered: Stop-signal trigger flag.
self.path_cmd_pub = self.create_publisher(Path, '/final_path_commands', 1)
self.nav_pub = self.create_publisher(PoseStamped, '/nav_goal', 1)
self.marker_pub = self.create_publisher(MarkerArray, '/waypoint_markers', 1)
self.mecanum_pub = self.create_publisher(Twist, '%s' % self.cmd_vel_topic, 1)
self.final_reach_pub = self.create_publisher(Bool, '/road_network_navigator/reach_final', 1)
self.joints_pub = self.create_publisher(ServosPosition, 'servo_controller', 1)
# Robotic arm initialization
time.sleep(0.5)
set_servo_position(self.joints_pub, 1.5, ((1, 500), (2, 766), (3, 12), (4, 150), (5, 500),(10, 500)))
time.sleep(1.5)
self.get_logger().info("arm initialization complete")
self.create_subscription(Bool, '/navigation_controller/reach_goal', self.reach_callback, 1)
self.create_subscription(Int32, '/request_waypoint', self.command_callback, 1)
self.declare_parameter('use_yolo_detect', True)
self.use_yolo_detect = self.get_parameter('use_yolo_detect').get_parameter_value().bool_value
self.get_logger().info(f'use_yolo_detect: {self.use_yolo_detect}')
if self.use_yolo_detect:
self.create_subscription(ObjectsInfo, '/yolo/object_detect', self.get_object_callback, 1)
# Start the visual recognition service
self.yolo_client = self.create_client(Trigger, '/yolo/start')
if self.yolo_client.wait_for_service(timeout_sec=10.0):
self.yolo_client.call_async(Trigger.Request())
self.get_logger().info("\033[1;32m yolo start\033[0m")
else:
self.get_logger().warn("\033[1;32m yolo no start\033[0m")
Publishers:
self.path_cmd_pub: Publishes path commands to /final_path_commands with the Path type.
self.nav_pub: Publishes navigation goals to /nav_goal with the PoseStamped type.
self.marker_pub: Publishes visualization markers to /waypoint_markers with the MarkerArray type.
self.mecanum_pub: Publishes velocity control commands to /controller/cmd_vel with the Twist type.
self.final_reach_pub: Publishes the final-arrival flag to /road_network_navigator/reach_final with the Bool type.
self.joints_pub: Publishes servo control commands to servo_controller with the ServosPosition type.
self.create_subscription(Bool, '/navigation_controller/reach_goal', self.reach_callback, 1)
self.create_subscription(Int32, '/request_waypoint', self.command_callback, 1)
self.create_subscription(ObjectsInfo, '/yolo/object_detect', self.get_object_callback, 1)
Subscribers:
/navigation_controller/reach_goal: Subscribes to the navigation-controller goal-reached signal and calls reach_callback.
/request_waypoint: Subscribes to waypoint request commands and calls command_callback.
/yolo/object_detect: Subscribes to YOLO object detection results when enabled and calls get_object_callback.
# --- 3. Communication Interfaces ---
self.path_cmd_pub = self.create_publisher(Path, '/final_path_commands', 1)
self.nav_pub = self.create_publisher(PoseStamped, '/nav_goal', 1)
self.marker_pub = self.create_publisher(MarkerArray, '/waypoint_markers', 1)
self.mecanum_pub = self.create_publisher(Twist, '%s' % self.cmd_vel_topic, 1)
self.final_reach_pub = self.create_publisher(Bool, '/road_network_navigator/reach_final', 1)
self.joints_pub = self.create_publisher(ServosPosition, 'servo_controller', 1)
# Robotic arm initialization
time.sleep(0.5)
set_servo_position(self.joints_pub, 1.5, ((1, 500), (2, 766), (3, 12), (4, 150), (5, 500),(10, 500)))
time.sleep(1.5)
self.get_logger().info("arm initialization complete")
self.create_subscription(Bool, '/navigation_controller/reach_goal', self.reach_callback, 1)
self.create_subscription(Int32, '/request_waypoint', self.command_callback, 1)
self.declare_parameter('use_yolo_detect', True)
self.use_yolo_detect = self.get_parameter('use_yolo_detect').get_parameter_value().bool_value
self.get_logger().info(f'use_yolo_detect: {self.use_yolo_detect}')
if self.use_yolo_detect:
self.create_subscription(ObjectsInfo, '/yolo/object_detect', self.get_object_callback, 1)
# Start visual recognition service
self.yolo_client = self.create_client(Trigger, '/yolo/start')
if self.yolo_client.wait_for_service(timeout_sec=10.0):
self.yolo_client.call_async(Trigger.Request())
self.get_logger().info("\033[1;32m yolo start\033[0m")
else:
self.get_logger().warn("\033[1;32m yolo no start\033[0m")
Service Client:
self.yolo_client: YOLO startup service client /yolo/start, used to start visual recognition.
# Robotic arm initialization
time.sleep(0.5)
set_servo_position(self.joints_pub, 1.5, ((1, 500), (2, 766), (3, 12), (4, 150), (5, 500),(10, 500)))
time.sleep(1.5)
self.get_logger().info("arm initialization complete")
Robotic arm initialization sets the servos to their initial positions and waits for the process to complete.
self.load_waypoints_from_file()
self.create_timer(1.0, self.publish_visualization) # Static road network visualization
self.create_timer(0.2, self.check_traffic_light_loop) # Traffic light logic
self.create_timer(0.1, self.timer_dynamic_viz_callback) # Dynamic path clipping
Load the waypoint file. load_waypoints_from_file is called to load the road network from the YAML file.
self.create_timer(1.0, self.publish_visualization) # Static road network visualization
self.create_timer(0.2, self.check_traffic_light_loop) # Traffic light logic
self.create_timer(0.1, self.timer_dynamic_viz_callback) # Dynamic path clipping
Create timers:
The 1.0-second timer calls publish_visualization() to visualize the static road network.
The 0.2-second timer calls check_traffic_light_loop() to check traffic light logic.
The 0.1-second timer calls timer_dynamic_viz_callback() to visualize dynamic path trimming.
Get Robot Pose
def get_robot_pose(self):
try:
trans = self.tf_buffer.lookup_transform(self.frame_id, self.base_frame_id,rclpy.time.Time())
return [trans.transform.translation.x, trans.transform.translation.y]
except (LookupException, ConnectivityException, ExtrapolationException):
return None
Use TF2 to query the robot position in the map coordinate frame. A list in the form [x, y] is returned. If the query fails, None is returned.
Object Detection Callback
def get_object_callback(self, msg):
"""Handle target information detected by vision"""
self.objects_info = msg.objects
if self.objects_info:
for i in self.objects_info:
class_name = i.class_name
if class_name == 'red' or class_name == 'green':
self.traffic_signs_status = i
self.last_sign_time = self.get_clock().now().nanoseconds / 1e9
# Calculate target area to judge distance
# box[0]=xmin, box[1]=ymin, box[2]=xmax, box[3]=ymax
width = abs(i.box[2] - i.box[0])
height = abs(i.box[3] - i.box[1])
area = width * height
if class_name == 'red' and area > 2300:
self.stop_signal_triggered = True
break
Process the target information detected by YOLO. The detection results are traversed to find a red or green traffic light, then the traffic light state and timestamp are recorded. The target area is calculated to estimate distance. If a red light is detected and the area is greater than 2300, a stop signal is triggered.
Traffic Light Check Loop
def check_traffic_light_loop(self):
"""Core traffic light logic: stopping and resuming"""
current_time = self.get_clock().now().nanoseconds / 1e9
# Get latest memory status and area
time_since_sign = current_time - self.last_sign_time
memory_status = None
current_area = 0
# Signals are only valid if identified within 3 seconds
if self.traffic_signs_status and time_since_sign < 3.0:
memory_status = self.traffic_signs_status.class_name
# Calculate area
# box: [xmin, ymin, xmax, ymax]
box = self.traffic_signs_status.box
width = abs(box[2] - box[0])
height = abs(box[3] - box[1])
current_area = width * height
else:
memory_status = None
# Case A: Waiting at a stop
if self.waiting_for_light:
self.mecanum_pub.publish(Twist()) # Continuous braking
self.get_logger().info(f"Waiting for green light... Status: {memory_status}, Area: {int(current_area)}", throttle_duration_sec=1.0)
if memory_status == 'green':
self.get_logger().info(">>> Green light detected! Resuming movement.")
self.waiting_for_light = False
self.stop_signal_triggered = False
self.resume_path_from_current_pose()
return
# Case B: Determining if stopping is needed while moving
if self.is_moving:
robot_pos = self.get_robot_pose()
if robot_pos is None: return
if self.traffic_light_waypoint_id not in self.waypoints: return
light_pose = self.waypoints[self.traffic_light_waypoint_id]
dx = robot_pos[0] - float(light_pose[0])
dy = robot_pos[1] - float(light_pose[1])
dist = math.sqrt(dx**2 + dy**2)
# Set a large detection range combined with visual area to judge stopping timing, unit: meters
check_dist_range = 1.5
if dist < check_dist_range and memory_status == 'red' and self.stop_signal_triggered:
self.get_logger().warn(f"!!! RED LIGHT STOP: Area {int(current_area)} (Dist: {dist:.2f}m) !!!")
self.waiting_for_light = True
self.is_moving = False
self.stop_signal_triggered = False
self.mecanum_pub.publish(Twist()) # Emergency stop
# Send empty path to cancel controller task
empty_path = Path()
empty_path.header.frame_id = self.frame_id
self.path_cmd_pub.publish(empty_path)
Get the current time and calculate the time since the last detection. Then check the traffic light state and area recorded within the last 3 seconds. Case A: waiting at a stop. Continuous braking is applied. Once a green light is detected, movement resumes. Case B: stop decision while moving. If a red light is detected near the traffic light waypoint within 1.5 meters and the stop signal has been triggered, the robot performs an emergency stop and sends an empty path to cancel the current task.
Load Waypoint File
def load_waypoints_from_file(self):
file_name = self.get_parameter('file_name').get_parameter_value().string_value
file_path = '/home/ubuntu/ros2_ws/src/large_models_examples/large_models_examples/road_network/config/' + file_name + '.yaml'
self.get_logger().info(f"Loading waypoint file: {file_path}")
if not os.path.exists(file_path):
self.get_logger().error(f"File not found: {file_path}")
return
try:
with open(file_path, 'r', encoding='utf-8') as f:
data = yaml.safe_load(f)
if 'waypoints' in data:
raw_list = data['waypoints']
self.waypoints = {}
self.adjacency_list = {}
for item in raw_list:
nid = item['id']
self.waypoints[nid] = item['pose']
neighbors = item.get('to', [])
self.adjacency_list[nid] = neighbors
self.get_logger().info(f"Network loaded successfully with {len(self.waypoints)} nodes")
except Exception as e:
self.get_logger().error(f"Failed to load waypoints: {e}")
Load the road network from the YAML file. Read the file_name parameter, build the file path, parse the YAML file, and extract waypoint information. Build the waypoints dictionary from ID to pose and the adjacency_list dictionary from ID to neighbor list, then log the number of loaded nodes.
Shortest Path Search
def find_shortest_path(self, start_idx, goal_idx):
"""Breadth-First Search for shortest path"""
if start_idx == goal_idx: return [start_idx]
if start_idx not in self.adjacency_list or goal_idx not in self.adjacency_list:
self.get_logger().error(f"Start {start_idx} or Goal {goal_idx} not in network")
return None
queue = collections.deque([(start_idx, [start_idx])])
visited = set([start_idx])
while queue:
current, path = queue.popleft()
if current not in self.adjacency_list: continue
for neighbor in self.adjacency_list[current]:
if neighbor == goal_idx: return path + [neighbor]
if neighbor not in visited:
visited.add(neighbor)
queue.append((neighbor, path + [neighbor]))
return None
Use Breadth-First Search (BFS) to find the shortest path between two waypoints. If the start point is the same as the goal point, a single-point path is returned. BFS is performed with a queue and a visited set. A list of path node indices is returned. If no path is found, None is returned.
Command Callback
def command_callback(self, msg):
target = msg.data
if target not in self.waypoints:
self.get_logger().warn(f"Target node ID {target} does not exist!")
return
self.target_index = target
self.get_logger().info(f"Received command: Planning from Node {self.current_index} to Node {target}")
if target == self.current_index:
self.get_logger().info("Already at the target node.")
msg_finish = Bool(); msg_finish.data = True
self.final_reach_pub.publish(msg_finish)
return
# New task: Normal planning and generation of a brand new path
self.generate_new_path_sequence()
Process the waypoint request command. First, check whether the target waypoint exists. If the robot is already at the target waypoint, publish the completion flag directly. Otherwise, set the target index and call generate_new_path_sequence to generate a new path.
Generate New Path Sequence
def generate_new_path_sequence(self):
"""Plan and generate interpolated path"""
if self.target_index is None: return
# 1. Plan node list
node_path_list = self.find_shortest_path(self.current_index, self.target_index)
if not node_path_list or len(node_path_list) < 2:
self.get_logger().error("No valid path found.")
self.is_moving = False
return
# Traffic light truncation logic
segment_end_index = self.target_index
# Visualization of planned logical path
self.publish_planned_path(node_path_list)
# 2. Generate full dense Path message
full_path_msg = Path()
full_path_msg.header.frame_id = self.frame_id
# Traverse nodes to generate interpolation
for i in range(len(node_path_list) - 1):
start_id = node_path_list[i]
end_id = node_path_list[i+1]
start_pt = self.waypoints[start_id]
end_pt = self.waypoints[end_id]
segment_points = self.create_dense_points(start_pt, end_pt)
full_path_msg.poses.extend(segment_points)
self.send_path_to_controller(full_path_msg, segment_end_index)
Plan and generate the interpolated path. Use find_shortest_path to generate the list of path nodes, call publish_planned_path to visualize the logical path, use create_dense_points to generate dense interpolation points, then call send_path_to_controller to send the complete path.
Send Path to Controller
def send_path_to_controller(self, path_msg, segment_end_index):
"""Send path to controller and record"""
path_msg.header.stamp = self.get_clock().now().to_msg()
total_points = len(path_msg.poses)
if total_points > 0:
# Save current sent path for recovery use
self.current_execution_path = path_msg.poses
self.path_cmd_pub.publish(path_msg)
self.get_logger().info(f"Path command sent with {total_points} points")
self.is_moving = True
self.active_goal_index = segment_end_index
Send the path to the controller and record it. Set the timestamp of the path message, save the current path to current_execution_path for later recovery, publish the path command, then update the moving state and the active goal index.
Dynamic Visualization Timer Callback
def timer_dynamic_viz_callback(self):
"""Real-time cropping and publishing of remaining path visualization lines"""
# If no path is currently running or path is empty, clear the line
if not self.is_moving or not self.current_execution_path:
self.publish_dense_path_marker([])
return
# 1. (et robot's current position
robot_pos = self.get_robot_pose()
if robot_pos is None: return
# 2. Find the index of the closest path point to the robot
rx, ry = robot_pos[0], robot_pos[1]
min_dist = float('inf')
closest_idx = 0
# Traverse path to find the closest point index to the robot
for i, pose_stamped in enumerate(self.current_execution_path):
px = pose_stamped.pose.position.x
py = pose_stamped.pose.position.y
dist = (px - rx)**2 + (py - ry)**2
if dist < min_dist:
min_dist = dist
closest_idx = i
# 3. Crop remaining path - draw from the closest point onwards
# Keep one or two points before the closest point
start_viz_idx = max(0, closest_idx - 1)
remaining_poses = self.current_execution_path[start_viz_idx:]
# 4. Publish visualization Marker
self.publish_dense_path_marker(remaining_poses)
Trim and publish the remaining path visualization in real time. If the robot is not moving or the path is empty, clear the visualization. Then get the current robot position, find the index of the path point closest to the robot, keep the remaining path from that point onward while preserving one or two points before it, and call publish_dense_path_marker to publish the visualization.
Publish Dense Path Marker
def publish_dense_path_marker(self, pose_list):
"""
Function specifically for drawing dense paths
"""
marker = Marker()
marker.header.frame_id = self.frame_id
marker.ns = "active_path"
marker.id = 8888
marker.type = Marker.LINE_STRIP
# If list is empty or too short, delete the Marker
if len(pose_list) < 2:
marker.action = Marker.DELETE
else:
marker.action = Marker.ADD
marker.scale.x = 0.08 # Line width
marker.color.r = 1.0; marker.color.g = 0.0; marker.color.b = 0.0; marker.color.a = 1.0
# Convert PoseStamped list to Point list
for pose_stamped in pose_list:
p = Point()
p.x = pose_stamped.pose.position.x
p.y = pose_stamped.pose.position.y
p.z = 0.05
marker.points.append(p)
ma = MarkerArray()
ma.markers.append(marker)
self.marker_pub.publish(ma)
Create a LINE_STRIP marker, convert the PoseStamped list to a Point list, set the red line style, and publish the MarkerArray.
Resume Path from Current Pose
def resume_path_from_current_pose(self):
"""Find breakpoint in historical path and resume following"""
robot_pos = self.get_robot_pose()
if robot_pos is None:
self.get_logger().error("Cannot get robot pose, breakpoint recovery failed")
return
if not self.current_execution_path:
self.get_logger().warn("No historical path in memory, attempting to replan...")
self.generate_new_path_sequence()
return
# 1. Find the index of the closest point
min_dist = float('inf')
closest_idx = 0
# For performance, all points may not be traversed, but for safety traverse all first
rx, ry = robot_pos[0], robot_pos[1]
# Simple traversal to find the closest point - for hundreds of points, loops are fast
for i, pose_stamped in enumerate(self.current_execution_path):
px = pose_stamped.pose.position.x
py = pose_stamped.pose.position.y
dist = (px - rx)**2 + (py - ry)**2
if dist < min_dist:
min_dist = dist
closest_idx = i
# 2. Crop path
# Strategy: To prevent robot from staying in place, take points after the closest point
# If the closest point is already the last, it means arrived
if closest_idx >= len(self.current_execution_path) - 1:
self.get_logger().warn("Robot is already near the path end; forcing arrival.")
self.is_moving = False
return
# Slightly offset the index forward, e.g., count 2-5 points ahead, to give the robot forward momentum
start_slice_idx = min(closest_idx + 2, len(self.current_execution_path) - 1)
remaining_poses = self.current_execution_path[start_slice_idx:]
self.get_logger().info(f"Breakpoint recovery: resuming from point {closest_idx}/{len(self.current_execution_path)}")
recovered_path = Path()
recovered_path.header.frame_id = self.frame_id
recovered_path.poses = remaining_poses
self.send_path_to_controller(recovered_path, self.active_goal_index)
Find the breakpoint in the historical path and resume the path following. First, get the current robot position. If there is no historical path, replan the route. Then find the index of the closest point in the historical path. If the robot is already close to the end point, mark the path as reached. Otherwise, crop the remaining path and shift the starting point forward by two points to avoid standing in place, then send the recovered path to the controller.
Create Dense Path Points
def create_dense_points(self, p1, p2):
"""Linear interpolation to generate path points"""
points = []
step = 0.05
dx = float(p2[0]) - float(p1[0])
dy = float(p2[1]) - float(p1[1])
dist = math.sqrt(dx**2 + dy**2)
if dist < 0.01: return []
num = int(dist / step)
if num < 1: num = 1
# Calculate orientation of path travel direction
travel_yaw = math.atan2(dy, dx)
travel_q = self.euler_to_quaternion(travel_yaw)
# Check if the end point has a custom angle - check if list has a 3rd number
final_q = travel_q # Default end orientation equals travel orientation
if len(p2) >= 3:
custom_yaw = float(p2[2]) # Read the 3rd number from YAML
final_q = self.euler_to_quaternion(custom_yaw)
# Generate intermediate interpolation points - all using travel_q
for j in range(num):
t = j / float(num)
pose = PoseStamped()
pose.header.frame_id = self.frame_id
pose.pose.position.x = float(p1[0]) + dx * t
pose.pose.position.y = float(p1[1]) + dy * t
pose.pose.position.z = 0.0
pose.pose.orientation.x = travel_q[0]
pose.pose.orientation.y = travel_q[1]
pose.pose.orientation.z = travel_q[2]
pose.pose.orientation.w = travel_q[3]
points.append(pose)
end_pose = PoseStamped()
end_pose.header.frame_id = self.frame_id
end_pose.pose.position.x = float(p2[0])
end_pose.pose.position.y = float(p2[1])
end_pose.pose.position.z = 0.0
# Apply final orientation
end_pose.pose.orientation.x = final_q[0]
end_pose.pose.orientation.y = final_q[1]
end_pose.pose.orientation.z = final_q[2]
end_pose.pose.orientation.w = final_q[3]
points.append(end_pose)
return points
Generate path points by linear interpolation. Calculate the distance and direction between two points, then generate intermediate interpolation points with a step size of 0.05 m. The intermediate points use the travel direction as the orientation. The end point uses a custom orientation if a yaw value is defined in the YAML file. A PoseStamped list is returned.
Reach Goal Callback
def reach_callback(self, msg):
"""Received /navigation_controller/reach_goal signal"""
if not msg.data:
# 1. First check if it was actively stopped due to red light
if self.waiting_for_light:
self.get_logger().info(">> Goal cancelled during red light wait; pausing recovery.")
self.is_moving = False # Ensure status is marked as stopped
return # Hand control over to check_traffic_light_loop
# Obstacle failure handling: call new breakpoint recovery function
self.get_logger().warn(">>> Goal failed/aborted; attempting [Breakpoint Recovery] ...")
self.is_moving = False
self.resume_path_from_current_pose() # <--- Using new logic
return
current_time = self.get_clock().now().nanoseconds / 1e9
time_diff = current_time - self.debug_last_reach_time
if time_diff < self.min_reach_interval:
return
self.debug_last_reach_time = current_time
if self.is_moving and self.active_goal_index is not None:
self.current_index = self.active_goal_index
self.get_logger().info(f">>> Reached segment end: Node {self.current_index}")
# Final point check
if self.current_index == self.target_index:
self.get_logger().info("\033[1;32m=== Task Completed: Reached final target ===\033[0m")
self.is_moving = False
self.target_index = None
self.active_goal_index = None
self.publish_planned_path([])
finish_msg = Bool()
finish_msg.data = True
self.final_reach_pub.publish(finish_msg)
else:
self.get_logger().info("Segment finished, planning remaining path...")
# Arrived normally at intermediate point, continue to next segment
self.generate_new_path_sequence()
Process the reach-goal signal from the navigation controller. If msg.data is False, first check whether the stop was caused by a red light. If so, pause recovery. Otherwise, call the breakpoint recovery function resume_path_from_current_pose. If msg.data is True, check the time interval to prevent duplicate triggering, update the current index to the active goal index, and determine whether the final goal has been reached. If the final goal has been reached, publish the completion flag and clear the state. Otherwise, continue planning the next segment.
Publish Planned Path
def publish_planned_path(self, path_indices):
"""Publish logically planned path"""
marker = Marker()
marker.header.frame_id = self.frame_id
marker.ns = "active_path"
marker.id = 8888
marker.type = Marker.LINE_STRIP
marker.action = Marker.ADD if len(path_indices) > 1 else Marker.DELETE
marker.scale.x = 0.08
marker.color.r = 1.0; marker.color.g = 0.0; marker.color.b = 0.0; marker.color.a = 1.0
for idx in path_indices:
if idx in self.waypoints:
pt_data = self.waypoints[idx]
p = Point(x=float(pt_data[0]), y=float(pt_data[1]), z=0.05)
marker.points.append(p)
ma = MarkerArray()
ma.markers.append(marker)
self.marker_pub.publish(ma)
Publish the logical planned path visualization. Create a LINE_STRIP marker, draw the red line according to the list of path node indices, and publish the MarkerArray.
Publish Visualization
def publish_visualization(self):
"""
Draw global road network nodes and connections
1. Draw connections - LINE_LIST
2. Draw red solid circles - SPHERE_LIST
3. Draw node numbers - TEXT_VIEW_FACING
"""
if not self.waypoints: return
marker_array = MarkerArray()
# Draw road network connections - Green Lines
edge_marker = Marker()
edge_marker.header.frame_id = self.frame_id
edge_marker.ns = "graph_edges"
edge_marker.id = 9999
edge_marker.type = Marker.LINE_LIST
edge_marker.action = Marker.ADD
edge_marker.scale.x = 0.05
edge_marker.color.r = 0.0
edge_marker.color.g = 1.0
edge_marker.color.b = 0.0
edge_marker.color.a = 0.6
for start_id, neighbors in self.adjacency_list.items():
start_pose = self.waypoints[start_id]
for end_id in neighbors:
if end_id in self.waypoints:
end_pose = self.waypoints[end_id]
p1 = Point(x=float(start_pose[0]), y=float(start_pose[1]), z=0.0)
p2 = Point(x=float(end_pose[0]), y=float(end_pose[1]), z=0.0)
edge_marker.points.append(p1)
edge_marker.points.append(p2)
marker_array.markers.append(edge_marker)
# Draw numbers - Text & Fill sphere points
for nid, pose_data in self.waypoints.items():
# === A. Create red flat disk - simulated with cylinder ===
disk_marker = Marker()
disk_marker.header.frame_id = self.frame_id
disk_marker.ns = "node_disks" # Namespace
disk_marker.id = nid
disk_marker.type = Marker.CYLINDER # Use cylinder
disk_marker.action = Marker.ADD
# Set position
disk_marker.pose.position.x = float(pose_data[0])
disk_marker.pose.position.y = float(pose_data[1])
disk_marker.pose.position.z = 0.01 # Slightly off the ground to prevent overlap flickering
# Set orientation - default vertical up is fine
disk_marker.pose.orientation.w = 1.0
# Set size - squash the cylinder
disk_marker.scale.x = 0.10 # Diameter
disk_marker.scale.y = 0.10 # Diameter
disk_marker.scale.z = 0.01
# Set color - red
disk_marker.color.r = 1.0
disk_marker.color.g = 0.0
disk_marker.color.b = 0.0
disk_marker.color.a = 1.0
marker_array.markers.append(disk_marker)
# === B. Create text numbering ===
text_marker = Marker()
text_marker.header.frame_id = self.frame_id
text_marker.ns = "node_ids"
text_marker.id = nid
text_marker.type = Marker.TEXT_VIEW_FACING
text_marker.action = Marker.ADD
text_marker.text = str(nid)
text_marker.scale.z = 0.10
text_marker.color.r = 1.0
text_marker.color.g = 0.0
text_marker.color.b = 0.0
text_marker.color.a = 1.0
text_marker.pose.position.x = float(pose_data[0])
text_marker.pose.position.y = float(pose_data[1])+0.1
text_marker.pose.position.z = 0.05
marker_array.markers.append(text_marker)
self.marker_pub.publish(marker_array)
Draw the road network connections with a green LINE_LIST.
Draw the waypoint disks with red CYLINDER markers at each waypoint position.
Draw the waypoint IDs with TEXT_VIEW_FACING above each waypoint.
Finally, publish the complete MarkerArray.
Convert Euler Angle to Quaternion
def euler_to_quaternion(self, yaw):
cy = math.cos(yaw * 0.5)
sy = math.sin(yaw * 0.5)
return [0.0, 0.0, sy, cy]
Convert the yaw angle to quaternion form and return a list in the form [x, y, z, w].